本系列博客学习由非官方人员 半颗心脏 潜心所力所写,仅仅做个人技术交流分享,不做任何商业用途。如有不对之处,请留言,本人及时更改。
1、 Esp8266之 搭建开发环境,开始一个“hellow world”串口打印。
6 、Esp8266之 了解 SmartConfig与Airkiss一键配网,给8266配网上云端。无需把wifi名字密码写在固件里。
9、 Esp8266进阶之路第一篇: [小实战上篇]Windows系统搭建8266的本地Mqtt服务器,局域网点亮一盏LED灯。
10、 Esp8266进阶之路第二篇: [小实战下篇]Windows系统搭建8266的本地Mqtt服务器,局域网点亮一盏LED灯。
扫描二维码关注公众号,回复: 2297612 查看本文章
11、 Esp8266进阶之路第三篇: 8266接入阿里智能,点亮一盏LED灯,期待天猫精灵语音控制的不约而至!
12、 Esp8266进阶之路第四篇: 图文并茂学习阿里云主机搭建8266MQTT服务器,实现移动网络远程控制一盏LED。
13、 Esp8266进阶之路第五篇: 动手做个8266毕设小案例,smartConfig + MQTT协议轻松实现远程控制一盏LED。
14、 Esp8266进阶之路第六篇: esp8266的 FreeRtos系统学习的正确姿势 —— 环境搭建、烧录。
15、 Esp8266进阶之路第七篇: esp8266的 物联网又一股清流,8266接入阿里云平台非阿里智能的SDS服务,点亮一盏LED灯。
16、 Esp8266进阶之路第八篇: esp8266的 基于Nonos移植红外线H1838,实现红外遥控器配网,远程控制一盏灯。
17、 Esp8266进阶之路第九篇: esp8266自研的快速上电开关五次 (开-关为一次) ,无需按键触发则8266进去一键配网模式。
18、 Esp8266进阶之路第十篇: esp8266 基于NONOS 实现 OTA 远程升级,实现无线“ 热修复 ”升级固件程序。
19、 Esp8266进阶之路第十一篇【外设篇】: esp8266驱动 ds18b20、dht11 温湿度传感器,采集温湿度传感器到服务器。
20、 Esp8266进阶之路第十一篇【高级篇】: 深入学习esp8266的esp now模式,仿机智云做一个小网关,实现无需网络下轻松彼此连接通讯交互数据。
21、 Esp8266进阶之路第十二篇【高级篇】: 浅谈 esp8266 如何在本地局域网网络情况下实现最大效率地和前端实现数据交互。
22、 Esp8266进阶之路第十三篇【混杂篇】: esp8266的工程如何添加第三方静态库文件以及如何自定义文件夹,聊聊那些makeFile的事。。
23、 Esp8266进阶之路第十四篇【高级篇】: 再来一波 esp8266 基于 freeRtos系统连接自己私有的服务器实现OTA远程升级,接触下 lwip的基本知识。。
24、 Esp8266进阶之路第十五篇【高级篇】: 渗透学习回顾下esp8266的外置spi芯片25q系列,熟悉8266代码块在其的分布,得心应手放置图片或其他资料。
25、 Esp8266进阶之路第十六篇【高级篇】: 深聊下esp8266的串口 Uart 通讯中断编程,为您准备好了 NONOS 版本 和 RTOS 系统的串口驱动文件。
一、前言;
不知不觉又到了深夏的季节,在大城市真热!呼吸也难受!估计这工作一年在封闭的办公室办公,导致呼吸道有问题,唉!!还是要注意身体啊~ 能把一件简单事情做好,并且坚持下去,不容易啊!
- 我们已经学习
esp8266的方方面面都差不多了。貌似简单的串口通讯还没有提到,那么小徐精心准备下esp8266串口通讯封装的过程。
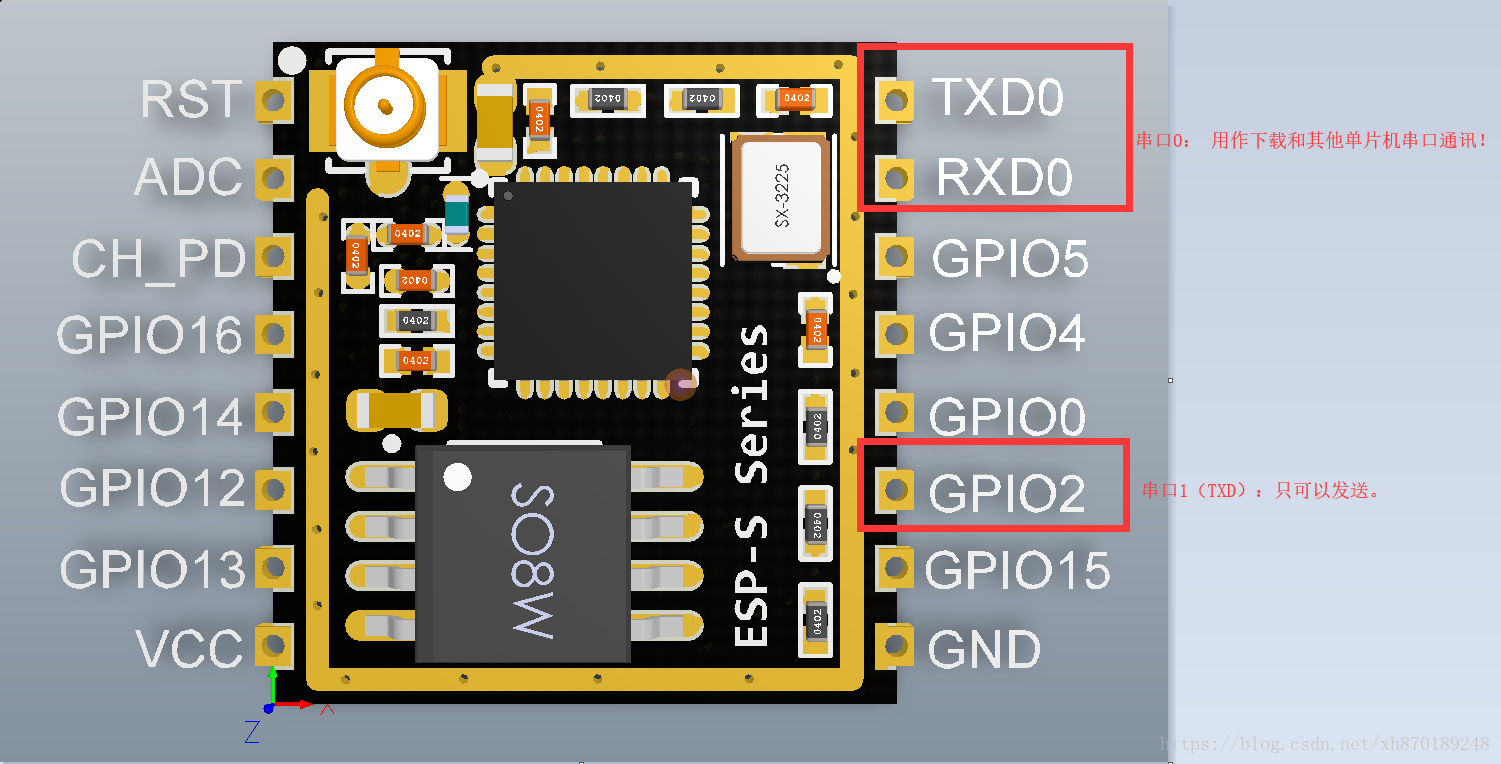
二、esp8266的串口分布情况;
①:
esp8266有几个串口?
- 答:我们常见的
ESP8266-12f有两个 UART,其中 UARTO 有 TX、RX,可做数据传输;UART1 由于 RX 脚被 SPI-Flash 占用,只能使用 TX,可以做串口调试信息打印。见下图:串口一是在GPIO2,只可以查看信息。
②:
esp8266如何屏蔽上电打印??
- 答:不管什么情况,U0TXD默认上电有系统打印,对此敏感应用可通过UART的内部引脚交换功能,在初始化的时候,调用system_uart_swap函数。将
txd和rxd分别于U0RTS(MTDO/GPIO15)、U0CTS (MTCK/GPIO13)交换来屏蔽该上电的系统打印。 交换后,硬件上的下载管脚还是使用U0TXD + U0RXD,通信时需要将MTDO对应接到MCU的RXD,MTCK对应加到MCU的TXD。
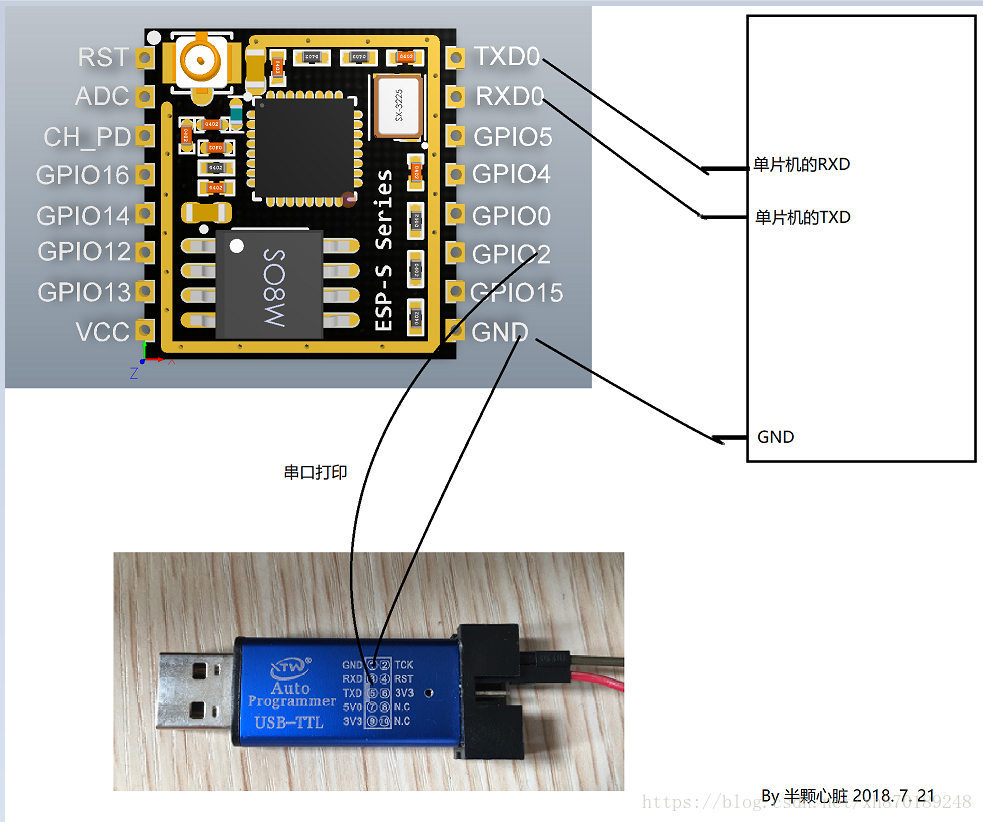
三、esp8266的串口通讯时候,应该怎么接线;
- 如下图所示,短脚
txd和rxd作为和单片机通讯的端脚,而gpio2作为系统打印的端口,用来查看系统日志。【记得要公地】
四、esp8266的NONOS非系统,串口编程;
①:乐鑫给出的关于这个
NONOS的串口文件其实都基本没什么修改的,参考来自网上大神,初始化uart_init()方法,里面的第一个是串口0的波特率,第二个是串口一的波特率设置。②:然后通过接受数据,发生中断,进入到中断回调函数
uart0_rx_intr_handler(),如下代码:
LOCAL void uart0_rx_intr_handler(void *para) {
int fifo_len;
//1 接收中断禁用,用于不再接受数据,因为现在处于处理数据中
uart_rx_intr_disable(UART0);
//2 清楚中断标志
WRITE_PERI_REG(UART_INT_CLR(UART0), UART_RXFIFO_FULL_INT_CLR);
CLEAR_PERI_REG_MASK(UART_INT_ENA(UART0), UART_TXFIFO_EMPTY_INT_ENA);
//3 从 FIFO 读取接收到的数据长度
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)
& UART_RXFIFO_CNT;
uint8 d_tmp = 0;
uint8 idx = 0;
//定义一个临时接收的数据
uint8 recieveData[fifo_len];
//3. 赋值给临时数组
for (idx = 0; idx < fifo_len; idx++) {
d_tmp = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF; //根据数据长度一个一个读取数据
recieveData[idx] = d_tmp; //赋值
}
//做你自己的事情,recieveData[]数组就是接收到单片机的数据
//4 计数使能中断 UART0
WRITE_PERI_REG(UART_INT_CLR(UART0),
UART_RXFIFO_FULL_INT_CLR | UART_RXFIFO_TOUT_INT_CLR);
uart_rx_intr_enable(UART0);
}
五、esp8266的RTOS实时系统,串口编程;
- ①:
RTOS实时系统的比NONOS的稍微复杂丢丢,实现的原理和过程也是一样的,通过中断,但是代码不一样,初始化配置如下:
void uart_init_new(void) {
UART_WaitTxFifoEmpty(UART0);
UART_WaitTxFifoEmpty(UART1);
//下位机通讯串口设置:串口0
UART_ConfigTypeDef uart_config;
uart_config.baud_rate = BIT_RATE_9600; //波特率为9600
uart_config.data_bits = UART_WordLength_8b;
uart_config.parity = USART_Parity_None;
uart_config.stop_bits = USART_StopBits_1;
uart_config.flow_ctrl = USART_HardwareFlowControl_None;
uart_config.UART_RxFlowThresh = 120;
uart_config.UART_InverseMask = UART_None_Inverse;
UART_ParamConfig(UART0, &uart_config);
//日志打印 串口一
uart_config.baud_rate = BIT_RATE_74880;//波特率为74880
UART_ParamConfig(UART1, &uart_config);
UART_IntrConfTypeDef uart_intr;
uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA | UART_FRM_ERR_INT_ENA
| UART_RXFIFO_FULL_INT_ENA | UART_TXFIFO_EMPTY_INT_ENA;
uart_intr.UART_RX_FifoFullIntrThresh = 100;
uart_intr.UART_RX_TimeOutIntrThresh = 10;
uart_intr.UART_TX_FifoEmptyIntrThresh = 20;
UART_IntrConfig(UART0, &uart_intr);
UART_SetPrintPort(UART1);
UART_intr_handler_register(uart0_rx_intr_handler, NULL);
ETS_UART_INTR_ENABLE();
}- ②:数据中断处理函数:
void ICACHE_FLASH_ATTR PutUartDataToQueueFromISR(void) {
portBASE_TYPE xHigherPriorityTaskWoken = pdFALSE;
uint16 fifo_len = 0;
uint16 buf_idx = 0;
uint8* uart_fifo = NULL;
fifo_len = (READ_PERI_REG(UART_STATUS(UART0)) >> UART_RXFIFO_CNT_S)
& UART_RXFIFO_CNT;
uint8 d_tmp = 0;
uint8 idx = 0;
uint8 recievHex[fifo_len];
int i;
for (idx = 0; idx < fifo_len; idx++) {
d_tmp = READ_PERI_REG(UART_FIFO(UART0)) & 0xFF;
recievHex[idx] = d_tmp;
}
//做你自己的事情,recievHex[]数组就是接收到单片机的数据
}六、开始封装串口编程成一个函数;
下面的过程都是适用
NONOS和RTOS的;
一、写注册回调函数和注册回调函数;
- 封装的意义和目的在于怎么把代码降低耦合,我这依然用回调方法的思想封装,首先要写一个回调函数的格式,毕竟都是传数组的,所以也就这样写吧!
//声明方法
typedef void (*Recv_Uart_Callback)(uint8* pData_buf, uint16 data_len);
//注册回调函数
void funUart_ReadBack_Register(Recv_Uart_Callback callBack);
二、源文件调用;
- 首先在全局变量声明下,然后通过赋值,后面调用即可。
Recv_Uart_Callback callBack;
void funUart_ReadBack_Register(Recv_Uart_Callback tempCallBack) {
callBack = tempCallBack;
}- 在串口中断回调函数调用:
//做你自己的事情,recieveData[]数组就是接收到单片机的数据
callBack(recieveData,fifo_len);
三、如何调用?
好吧!调用起来非常简单!
Let us see !
- 下面是
NONOS代码示范:
//串口回调
void redCallBackFun(uint8* pData_buf, uint16 data_len) {
int i;
for (i = 0; i < data_len; i++)
uart_tx_one_char(UART0, *(pData_buf + i)); //原路返回
}
void user_init(){
uart_init(9600, 9600);
funUart_ReadBack_Register(redCallBackFun);
}- 下面是
rtos代码示范:
void funUartCallBack(uint8* pData_buf, uint16 data_len) {
int i;
UART0_Send_Hex(pData_buf, data_len); //原路返回
for (i = 0; i < data_len; i++) {
printf("pData_buf[%d]:%d\n", i, *(pData_buf + i)); //打印到串口一
}
}
void Task_Uart_Communi(){
Uart_CallBack_Register(funUartCallBack);
uart_init_new();
while(1){};
}
void user_init(void) {
xTaskCreate(Task_Uart_Communi, "Task_Uart_Communi", 512, NULL,
2, NULL);
os_printf("\n SDK version:%s \n", system_get_sdk_version());
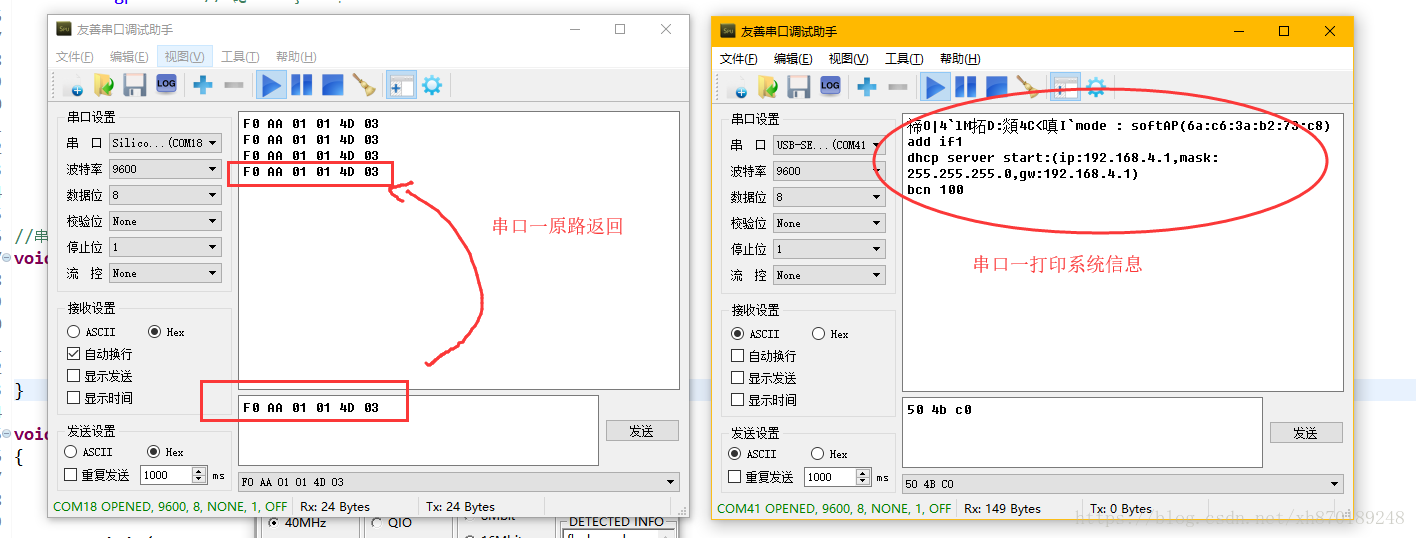
}七、看看打印的效果;
八、下载;
代码是我一个下午慢慢整理或封装的,所以收点那个费用。勿怪勿怪!
不带源代码的编译好的固件下载,注意接线方式,和烧录地址,文件夹有截图示范!点我下载编译好的固件!
源文件中,注意要去掉自带的
uart.h和uart.c文件,毕竟会造成冲突!如果rots编译发现缺少UART_RXD_INV,那么请手动添加uart_register.h文件!最后,共勉成果!