写作原因
1.nao的母公司被软银收购,部分资料在新发售的v6中不足。
2.网上流传的关于nao的资料都是偏久,而且不是很全面
使用工具
choregraphe 2.8.x和vscode,由于资金限制,很多功能是参考技术文档中所说,根据个人经验书写,并未在v6上进行测试
基础使用
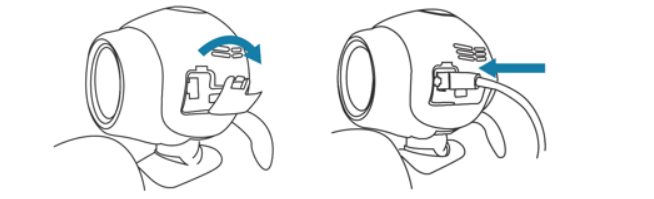
1.连接机器人,首先将机器人开机之后,按下图所示用一个网线一端连接至机器人后脑端口,一端连接至笔记本电脑的以太网端口,注意此时应该暂时断开无线连接。
2.按下机器人胸前按钮(1s左右),一般来说,此时机器人应该报的IP是169开头的网段,而且第一次使用机器人的话应该是没有中文包的,当然厂家一开始给安装的除外。不用担心,一次听不懂,再按一次,多次之后,机器人就会一个字母一个字母的说。
3.准备一个路由器,或者是手机开的热点。打开电脑的浏览器,在网址栏输入第二步的IP地址。弹出nao的管理登录界面,密码和账号均为nao(默认),此处没有使用最新的工具robot setting,因为随着nao的升级,网页始终是兼容的,而且量级也比较轻。进入之后便开始了一些列的设置,不同英文的可以使用谷歌或者百度翻译。
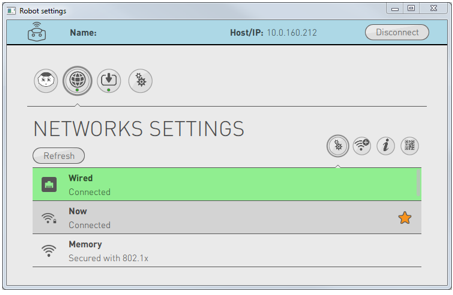
4.找到下图所示网络标志的地方,这个是截取的robot setting中图,实际和此类似,当时不完全相同。然后选择你想连接的WIFI,进行连接。连接成功之后,拔掉网线,将笔记本也接入此WIFI下。
5.按下机器人胸前按钮,此时的IP应该是192或者172或者其他开头的网段,电脑打开浏览器,输入此地址,可以对机器人进行管理。
到此,我们就将机器人和电脑放入一个局域网下,可以通过相应软件或者程序来进行控制。注意,连接网线或者在一个局域网均可对机器人进行操作。