ps:此文中的局部全局自适应搜索方案跟我想的简直一模一样啊
分类&跟踪 的区别

分类任务 跟踪任务
100类 没有固定类别
识别任务 矩阵学习+边界框回归
输入 图片 视频
DaSiamRPN 基于对siamRP的缺点的解决

![]()
存在的问题:
1 视频检测数据集 20 for VID 和 30 foryoutube -BB 有很少的类别,不足以训练高质量的广义feature

2 两个训练数据上的不平衡: 非语义背景 和 语义错误选择
3 大多跟踪器为短期场景量身定做,这里目标总是出现
解决办法:
1 通过 增加 ImageNet Detection 和 COCO Detection数据集 增加正样本对 的类别
2 消除训练样本分布的不不平衡
3 定制针对视觉跟踪的 有效数据增广
4 通过介绍一个简单而有效的局部-全局 搜索区域策略(自适应) 增加 长期跟踪 能力
ImageNet Detection

COCO Detection



imbalance
non-semantic
semantic
distractor
tailored
scenario
eliminate
distribution
generalized
customizing 定制
augmentation 增加

红色负样本太简单(语义信息太少),这样只能让 分清前景背景。
ImageNet Detection 和 COCO Detection 的数据充当正样本,增强分类器的泛化能力

Distractor-aware training 能意识到错误选择的训练
1 不同类的正样本能增强泛化能力
2 有语义的负样本能增加区分能力 (b)同类的负样本 (c)不同类别的负样本(北极熊,猫)
3 为视觉跟踪定制有效数据增广(平移,旋转,光照,运动模糊)

SiamRPN中跟丢了,但是得分还是很高
DaSiamRPN中跟丢了,但是得分降低
高质量跟踪分数,扩大搜索区域,当目标从新出现可以及时跟上

snapshot 快照
ablation 消融
检测数据的正样本
有语义的负样本
能意识到错误 更新
长时跟踪目标
实验

UAV20L
AUC 0.617
20像素 precision 0.838
UAV123
AUC 0.586
20像素 precision 0.796



2018 72种算法


成熟算法抠图,拟合框,漏含里面的背景&漏在外面的前景 加权和最小
通过protocol协议与他的工具箱交互,跟踪失败后会被重启
鲁棒性(重启的次数)
精度(平均期望框和跟踪框重叠率)

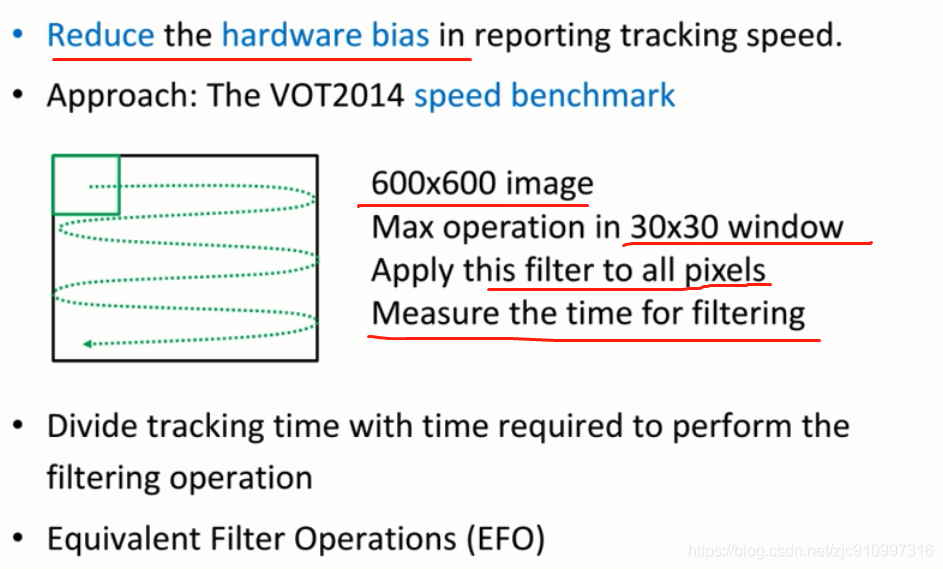
EFO 归一化思路指标,600 600做30 30 滤波操作,以此时间评价电脑性能,归一化算法的速度

 实时比赛
实时比赛

长时比赛

平均每段视频12次丢失,每次丢失40帧
absence 缺失




起作用的尝试

不起作用的尝试




F score 0.607

实时

LT长时

