IAR for ARM
STM32F10X官方固件库:
链接: https://pan.baidu.com/s/1U6vfGqp9IhhkvVuDXcxTtQ
提取码: 9mcx
IAR for ARM项目文件
下面是我自己写整理创建的IAR for ARM项目文件
链接: https://pan.baidu.com/s/189WZVhEDhhO98BA3I2Jfeg
提取码: m5fu
启动文件及一些重要标准库的分析
启动文件
在按照网上的教程创建IAR的STM32项目时,网上的教程都要求在项目文件中放入启动文件startup_stm32f10x_xx.s,可我在编译时发现,即使把启动文件去掉,IAR还是可以正常编译并下载Hex到芯片中并调试,所以我猜测这个启动文件应该是由IAR自动集成到Hex中的,在IAR主界面,右键左边的项目名称 -> Options... -> General Options -> Target -> Device - > 选择ST STM32F103RC,IAR大概会根据你选择的不同的Device,写入不同的启动文件汇编代码。
接下来解析的启动文件,在固件库的【/STM32F10x_StdPeriph_Lib_V3.5.0/Libraries/CMSIS/CM3/DeviceSupport/ST/STM32F10x/startup/iar/】路径中
因为不能给启动文件加断点,以下解析都是基于自己的理解和网上相关教程的解析:
启动文件的引导地址可以自己定义,如果使用默认的配置,IAR在编译时,将会使用IAR自己的系统库作为引导
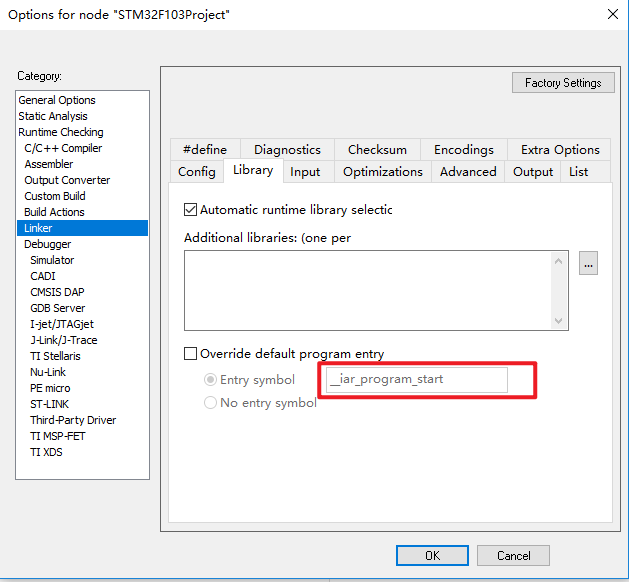
__iar_program_start 这个入口函数就是IAR内部提供的入口函数,这个函数不能加断点,似乎只能通过反汇编的形式来分析,我在IAR程序目录搜索了一边,真的有很多cstartup.s文件,IAR提供了很多系列芯片的cstartup.s文件
;******************** (C) COPYRIGHT 2011 STMicroelectronics ********************
;* 文件名: : startup_stm32f10x_md.s
;* 作者 : MCD Application Team
;* 版本 : V3.5.0
;* 日期 : 2011年3月11日
;* 描述 : STM32F10x是EWARM工具链中的中等容量像量表
;* : 这个模块执行了
;* : - 设置初始化SP(堆栈寄存器)
;* : - 配置时钟系统
;* : - 设置IAR程序的入口函数
;* : - 设置异常中断服务像量表的入口地址
;*
;* After Reset the Cortex-M3 processor is in Thread mode,
;* priority is Privileged, and the Stack is set to Main.
;********************************************************************************
;* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
;* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE TIME.
;* AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY DIRECT,
;* INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING FROM THE
;* CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE CODING
;* INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
;*******************************************************************************
;
; The modules in this file are included in the libraries, and may be replaced
; by any user-defined modules that define the PUBLIC symbol _program_start or
; a user defined start symbol.
; To override the cstartup defined in the library, simply add your modified
; version to the workbench project.
;
; The vector table is normally located at address 0.
; When debugging in RAM, it can be located in RAM, aligned to at least 2^6.
; The name "__vector_table" has special meaning for C-SPY:
; it is where the SP start value is found, and the NVIC vector
; table register (VTOR) is initialized to this address if != 0.
;
; Cortex-M version
;
MODULE ?cstartup ; // 定义模块名称
;; Forward declaration of sections.
SECTION CSTACK:DATA:NOROOT(3)
SECTION .intvec:CODE:NOROOT(2)
EXTERN __iar_program_start ; // IAR程序暴露的入口地址名称
EXTERN SystemInit ; // 系统初始化时调用的地址
PUBLIC __vector_table ; // 中断向量表地址
DATA ; // 定义数据段的数据
__vector_table ; 压入中断向量表名称,以下只截取的部分内容,DCD指令是ARM指令集中的一个压栈的指令
DCD sfe(CSTACK)
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
............................................ 省略 ....................................................
DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;;
;; Default interrupt handlers. ; // 定义默认的中断函数,这里只是弱定义,可以被用户自己定义的中断向量函数覆盖
;;
THUMB ; // 进入THUMB模式(THUMB-2指令集)
PUBWEAK Reset_Handler
SECTION .text:CODE:REORDER(2)
Reset_Handler
LDR R0, =SystemInit
BLX R0
LDR R0, =__iar_program_start
BX R0
PUBWEAK NMI_Handler
SECTION .text:CODE:REORDER(1)
NMI_Handler
B NMI_Handler
PUBWEAK HardFault_Handler
SECTION .text:CODE:REORDER(1)
.................................... 省略 .......................................
USBWakeUp_IRQHandler
B USBWakeUp_IRQHandler
END
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
stm32f10x_it 【异常中断服务】
以下是固件库提供的默认异常中断函数
// NMI中断,即不可屏蔽中断,不可屏蔽中断请求信号NMI用来通知CPU,发生了“灾难性”的事件,如电源掉电、存储器读写出错、总线奇偶位出错等。NMI线上中断请求是不可屏蔽的(即无法禁止的)、而且立即被CPU锁存。因此NMI是边沿触发,不需要电平触发。
void NMI_Handler(void);
// 硬件错误中断
void HardFault_Handler(void);
// 内存管理异常中断
void MemManage_Handler(void);
// 总线异常
void BusFault_Handler(void);
// 使用中异常
void UsageFault_Handler(void);
// 系统调用异常,SVC异常是必须立即得到响应的
void SVC_Handler(void);
// This function handles Debug Monitor exception. 调试监视异常
void DebugMon_Handler(void);
// 也是系统调用异常,但PendSV是为系统设备而设的“可悬挂请求”(pendable request),PendSV 的典型使用场合是在上下文切换时(在不同任务之间切换)
void PendSV_Handler(void);
// 系统定时器中断
void SysTick_Handler(void);
stm32f10x_rcc【复位与时钟控制器】
// 复位时钟
void RCC_DeInit(void);
// 配置外部告诉时钟
void RCC_HSEConfig(uint32_t RCC_HSE);
// 等待外部高速时钟启动
ErrorStatus RCC_WaitForHSEStartUp(void);
// 调整内部高速时钟(HSI)到指定的值
void RCC_AdjustHSICalibrationValue(uint8_t HSICalibrationValue);
// 启用或禁用内部高速时钟
void RCC_HSICmd(FunctionalState NewState);
// 配置PLL(锁相环)的时钟源和倍频因子
void RCC_PLLConfig(uint32_t RCC_PLLSource, uint32_t RCC_PLLMul);
// 启用或禁用PLL
void RCC_PLLCmd(FunctionalState NewState);
// 配置PREDIV1分频因子
#if defined (STM32F10X_LD_VL) || defined (STM32F10X_MD_VL) || defined (STM32F10X_HD_VL) || defined (STM32F10X_CL)
void RCC_PREDIV1Config(uint32_t RCC_PREDIV1_Source, uint32_t RCC_PREDIV1_Div);
#endif
//
#ifdef STM32F10X_CL
void RCC_PREDIV2Config(uint32_t RCC_PREDIV2_Div);
void RCC_PLL2Config(uint32_t RCC_PLL2Mul);
void RCC_PLL2Cmd(FunctionalState NewState);
void RCC_PLL3Config(uint32_t RCC_PLL3Mul);
void RCC_PLL3Cmd(FunctionalState NewState);
#endif /* STM32F10X_CL */
// 配置系统时钟源
void RCC_SYSCLKConfig(uint32_t RCC_SYSCLKSource);
// 获取系统时钟源
uint8_t RCC_GetSYSCLKSource(void);
// 配置AHB总线时钟源
void RCC_HCLKConfig(uint32_t RCC_SYSCLK);
// 配置低速APB时钟源
void RCC_PCLK1Config(uint32_t RCC_HCLK);
// 配置高速APB时钟源
void RCC_PCLK2Config(uint32_t RCC_HCLK);
// 启用或禁用RCC中断
void RCC_ITConfig(uint8_t RCC_IT, FunctionalState NewState);
// 配置USB或者OTG时钟源
#ifndef STM32F10X_CL
void RCC_USBCLKConfig(uint32_t RCC_USBCLKSource);
#else
void RCC_OTGFSCLKConfig(uint32_t RCC_OTGFSCLKSource);
#endif /* STM32F10X_CL */
// 配置ADC时钟源
void RCC_ADCCLKConfig(uint32_t RCC_PCLK2);
// 配置I2S2时钟源
#ifdef STM32F10X_CL
void RCC_I2S2CLKConfig(uint32_t RCC_I2S2CLKSource);
void RCC_I2S3CLKConfig(uint32_t RCC_I2S3CLKSource);
#endif /* STM32F10X_CL */
// 配置外部低速时钟源
void RCC_LSEConfig(uint8_t RCC_LSE);
// 启用或禁用内部低速时钟
void RCC_LSICmd(FunctionalState NewState);
// 配置RTC时钟源
void RCC_RTCCLKConfig(uint32_t RCC_RTCCLKSource);
// 启用或禁用RTC时钟
void RCC_RTCCLKCmd(FunctionalState NewState);
// 获取各个片上的时钟频率
void RCC_GetClocksFreq(RCC_ClocksTypeDef* RCC_Clocks);
// 启用或禁用AHB外设时钟
void RCC_AHBPeriphClockCmd(uint32_t RCC_AHBPeriph, FunctionalState NewState);
// 启用或禁用AHB2外设时钟
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
// 启用或禁用APB1外设时钟
void RCC_APB1PeriphClockCmd(uint32_t RCC_APB1Periph, FunctionalState NewState);
// 对外设端口进行复位
#ifdef STM32F10X_CL
void RCC_AHBPeriphResetCmd(uint32_t RCC_AHBPeriph, FunctionalState NewState);
#endif /* STM32F10X_CL */
// 复位高速APB(APB2)外设
void RCC_APB2PeriphResetCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
// 复位低速APB(APB1)外设
void RCC_APB1PeriphResetCmd(uint32_t RCC_APB1Periph, FunctionalState NewState);
// 启用或禁用备份域
void RCC_BackupResetCmd(FunctionalState NewState);
// 启用或禁用时钟安全系统
void RCC_ClockSecuritySystemCmd(FunctionalState NewState);
// 选择MCO引脚输出的时钟源
void RCC_MCOConfig(uint8_t RCC_MCO);
// 根据给定的标志位来获取一些RCC一些设置的状态
FlagStatus RCC_GetFlagStatus(uint8_t RCC_FLAG);
// 清除RCC标志位的状态
void RCC_ClearFlag(void);
// 获取RCC中断的状态
ITStatus RCC_GetITStatus(uint8_t RCC_IT);
// 清除中断挂起
void RCC_ClearITPendingBit(uint8_t RCC_IT);
stm32f10x_tim 【定时器】
可能是因为STM32时钟太多了,用于管理时钟的函数竟有差不多上百个
// 复位指定的通用定时器
void TIM_DeInit(TIM_TypeDef* TIMx);
// 初始化指定的通用定时器,设置基础频率
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
// 初始化比较电平(不是很理解,以后在开发过程中理解了再补充注释)
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
// 初始化外设定时器
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
// 配置PWM输出信号
void TIM_PWMIConfig(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
//
void TIM_BDTRConfig(TIM_TypeDef* TIMx, TIM_BDTRInitTypeDef *TIM_BDTRInitStruct);
void TIM_TimeBaseStructInit(TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_ICStructInit(TIM_ICInitTypeDef* TIM_ICInitStruct);
void TIM_BDTRStructInit(TIM_BDTRInitTypeDef* TIM_BDTRInitStruct);
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
void TIM_GenerateEvent(TIM_TypeDef* TIMx, uint16_t TIM_EventSource);
void TIM_DMAConfig(TIM_TypeDef* TIMx, uint16_t TIM_DMABase, uint16_t TIM_DMABurstLength);
void TIM_DMACmd(TIM_TypeDef* TIMx, uint16_t TIM_DMASource, FunctionalState NewState);
void TIM_InternalClockConfig(TIM_TypeDef* TIMx);
void TIM_ITRxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
void TIM_TIxExternalClockConfig(TIM_TypeDef* TIMx, uint16_t TIM_TIxExternalCLKSource,
uint16_t TIM_ICPolarity, uint16_t ICFilter);
void TIM_ETRClockMode1Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
void TIM_ETRClockMode2Config(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler,
uint16_t TIM_ExtTRGPolarity, uint16_t ExtTRGFilter);
void TIM_ETRConfig(TIM_TypeDef* TIMx, uint16_t TIM_ExtTRGPrescaler, uint16_t TIM_ExtTRGPolarity,
uint16_t ExtTRGFilter);
void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode);
void TIM_CounterModeConfig(TIM_TypeDef* TIMx, uint16_t TIM_CounterMode);
void TIM_SelectInputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource);
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,
uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_SelectCOM(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_SelectCCDMA(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_CCPreloadControl(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC1FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC2FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC3FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_OC4FastConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCFast);
void TIM_ClearOC1Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC2Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC3Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_ClearOC4Ref(TIM_TypeDef* TIMx, uint16_t TIM_OCClear);
void TIM_OC1PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC1NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC2PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC2NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC3PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_OC3NPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCNPolarity);
void TIM_OC4PolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
void TIM_CCxCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCx);
void TIM_CCxNCmd(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_CCxN);
void TIM_SelectOCxM(TIM_TypeDef* TIMx, uint16_t TIM_Channel, uint16_t TIM_OCMode);
void TIM_UpdateDisableConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_UpdateRequestConfig(TIM_TypeDef* TIMx, uint16_t TIM_UpdateSource);
void TIM_SelectHallSensor(TIM_TypeDef* TIMx, FunctionalState NewState);
void TIM_SelectOnePulseMode(TIM_TypeDef* TIMx, uint16_t TIM_OPMode);
void TIM_SelectOutputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_TRGOSource);
void TIM_SelectSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_SlaveMode);
void TIM_SelectMasterSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_MasterSlaveMode);
void TIM_SetCounter(TIM_TypeDef* TIMx, uint16_t Counter);
void TIM_SetAutoreload(TIM_TypeDef* TIMx, uint16_t Autoreload);
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
void TIM_SetIC1Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC2Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC3Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetIC4Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC);
void TIM_SetClockDivision(TIM_TypeDef* TIMx, uint16_t TIM_CKD);
uint16_t TIM_GetCapture1(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture2(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture3(TIM_TypeDef* TIMx);
uint16_t TIM_GetCapture4(TIM_TypeDef* TIMx);
uint16_t TIM_GetCounter(TIM_TypeDef* TIMx);
uint16_t TIM_GetPrescaler(TIM_TypeDef* TIMx);
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
stm32f10x_usart 【串口通信】
// 复位USART
void USART_DeInit(USART_TypeDef* USARTx);
// 填充指定的USART到默认值
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
// 填充USART_InitTypeDef结构体到默认值
void USART_StructInit(USART_InitTypeDef* USART_InitStruct);
// 填充指定外设的USART的USART_ClockInitTypeDef结构体到默认值
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
// 填充USART_ClockInitStruct到默认值
void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
//
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
void USART_SetAddress(USART_TypeDef* USARTx, uint8_t USART_Address);
void USART_WakeUpConfig(USART_TypeDef* USARTx, uint16_t USART_WakeUp);
void USART_ReceiverWakeUpCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_LINBreakDetectLengthConfig(USART_TypeDef* USARTx, uint16_t USART_LINBreakDetectLength);
void USART_LINCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
void USART_SendBreak(USART_TypeDef* USARTx);
void USART_SetGuardTime(USART_TypeDef* USARTx, uint8_t USART_GuardTime);
void USART_SetPrescaler(USART_TypeDef* USARTx, uint8_t USART_Prescaler);
void USART_SmartCardCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_SmartCardNACKCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_HalfDuplexCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_OverSampling8Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_OneBitMethodCmd(USART_TypeDef* USARTx, FunctionalState NewState);
void USART_IrDAConfig(USART_TypeDef* USARTx, uint16_t USART_IrDAMode);
void USART_IrDACmd(USART_TypeDef* USARTx, FunctionalState NewState);
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
stm32f10x_gpio 【通用输入输出】
void GPIO_DeInit(GPIO_TypeDef* GPIOx);
void GPIO_AFIODeInit(void);
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct);
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_ETH_MediaInterfaceConfig(uint32_t GPIO_ETH_MediaInterface);