一、将静态正方体方体放到图片上
运行截图:

实验代码:
from pylab import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
"""
This is the augmented reality and pose estimation cube example from Section 4.3.
"""
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
# compute features
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
# camera calibration
K = my_calibration((747, 1000))
# 3D points at plane z=0 with sides of length 0.2
box = cube_points([0, 0, 0.1], 0.1)
# project bottom square in first image
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
# first points are the bottom square
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
# use H to transfer points to the second image
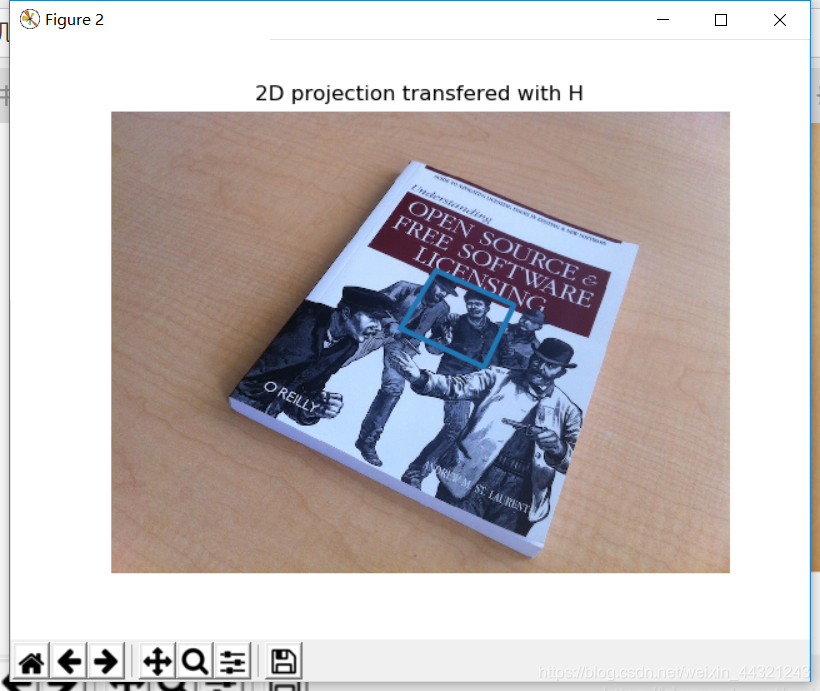
box_trans = homography.normalize(dot(H, box_cam1))
# compute second camera matrix from cam1 and H
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
# project with the second camera
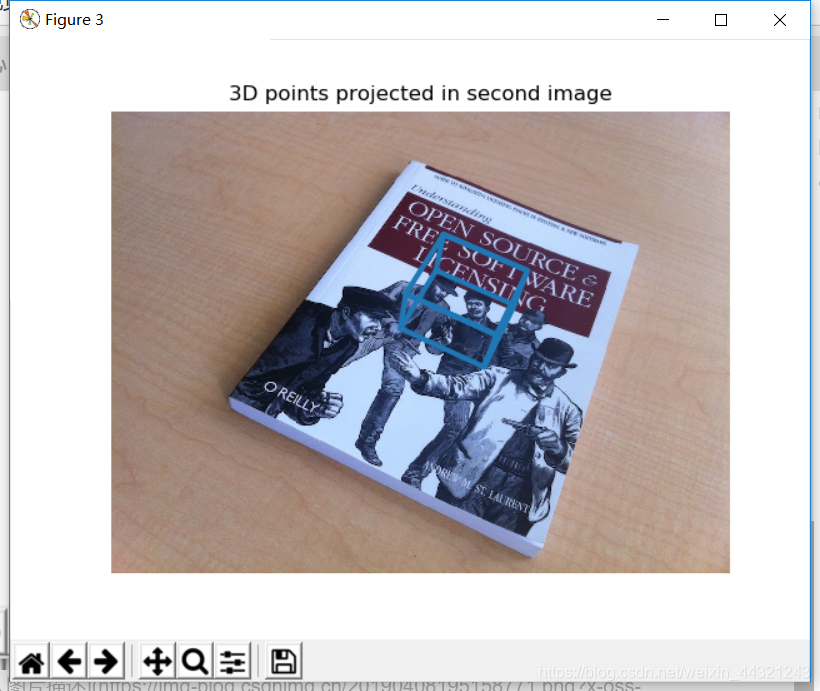
box_cam2 = cam2.project(homography.make_homog(box))
# plotting
im0 = array(Image.open('book_frontal.JPG'))
im1 = array(Image.open('book_perspective.JPG'))
figure()
imshow(im0)
plot(box_cam1[0, :], box_cam1[1, :], linewidth=3)
title('2D projection of bottom square')
axis('off')
figure()
imshow(im1)
plot(box_trans[0, :], box_trans[1, :], linewidth=3)
title('2D projection transfered with H')
axis('off')
figure()
imshow(im1)
plot(box_cam2[0, :], box_cam2[1, :], linewidth=3)
title('3D points projected in second image')
axis('off')
show()
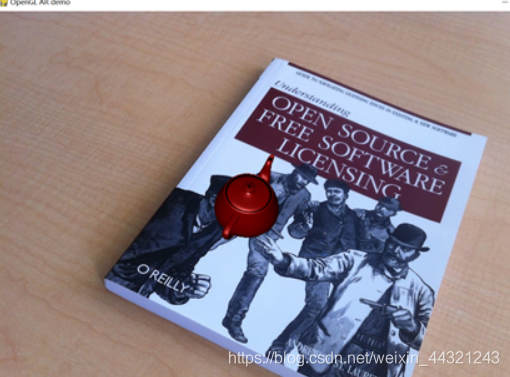
二: 将小茶壶放到图片上
效果图
实验代码:
import math
import pickle
from pylab import *
from OpenGL.GL import *
from OpenGL.GLU import *
from OpenGL.GLUT import *
import pygame, pygame.image
from pygame.locals import *
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
def set_projection_from_camera(K):
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0, 0]
fy = K[1, 1]
fovy = 2 * math.atan(0.5 * height / fy) * 180 / math.pi
aspect = (width * fy) / (height * fx)
near = 0.1
far = 100.0
gluPerspective(fovy, aspect, near, far)
glViewport(0, 0, width, height)
def set_modelview_from_camera(Rt):
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]])
R = Rt[:, :3]
U, S, V = np.linalg.svd(R)
R = np.dot(U, V)
R[0, :] = -R[0, :]
t = Rt[:, 3]
M = np.eye(4)
M[:3, :3] = np.dot(R, Rx)
M[:3, 3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image, "RGBX", 1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D, glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, width, height, 0, GL_RGBA, GL_UNSIGNED_BYTE, bg_data)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0, 0.0);
glVertex3f(-1.0, -1.0, -1.0)
glTexCoord2f(1.0, 0.0);
glVertex3f(1.0, -1.0, -1.0)
glTexCoord2f(1.0, 1.0);
glVertex3f(1.0, 1.0, -1.0)
glTexCoord2f(0.0, 1.0);
glVertex3f(-1.0, 1.0, -1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT, GL_AMBIENT, [0, 0, 0, 0])
glMaterialfv(GL_FRONT, GL_DIFFUSE, [0.5, 0.0, 0.0, 0.0])
glMaterialfv(GL_FRONT, GL_SPECULAR, [0.7, 0.6, 0.6, 0.0])
glMaterialf(GL_FRONT, GL_SHININESS, 0.25 * 128.0)
glutSolidTeapot(size)
width, height = 1000, 747
def setup():
pygame.init()
pygame.display.set_mode((width, height), OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
# compute features
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
K = my_calibration((747, 1000))
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
box = cube_points([0, 0, 0.1], 0.1)
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
box_trans = homography.normalize(dot(H, box_cam1))
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
Rt = dot(linalg.inv(K), cam2.P)
setup()
draw_background("book_perspective.bmp")
set_projection_from_camera(K)
set_modelview_from_camera(Rt)
draw_teapot(0.05)
pygame.display.flip()
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()
import math
import pickle
from pylab import *
from OpenGL.GL import *
from OpenGL.GLU import *
from OpenGL.GLUT import *
import pygame, pygame.image
from pygame.locals import *
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
def set_projection_from_camera(K):
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0, 0]
fy = K[1, 1]
fovy = 2 * math.atan(0.5 * height / fy) * 180 / math.pi
aspect = (width * fy) / (height * fx)
near = 0.1
far = 100.0
gluPerspective(fovy, aspect, near, far)
glViewport(0, 0, width, height)
def set_modelview_from_camera(Rt):
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]])
R = Rt[:, :3]
U, S, V = np.linalg.svd(R)
R = np.dot(U, V)
R[0, :] = -R[0, :]
t = Rt[:, 3]
M = np.eye(4)
M[:3, :3] = np.dot(R, Rx)
M[:3, 3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image, "RGBX", 1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D, glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, width, height, 0, GL_RGBA, GL_UNSIGNED_BYTE, bg_data)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0, 0.0);
glVertex3f(-1.0, -1.0, -1.0)
glTexCoord2f(1.0, 0.0);
glVertex3f(1.0, -1.0, -1.0)
glTexCoord2f(1.0, 1.0);
glVertex3f(1.0, 1.0, -1.0)
glTexCoord2f(0.0, 1.0);
glVertex3f(-1.0, 1.0, -1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT, GL_AMBIENT, [0, 0, 0, 0])
glMaterialfv(GL_FRONT, GL_DIFFUSE, [0.5, 0.0, 0.0, 0.0])
glMaterialfv(GL_FRONT, GL_SPECULAR, [0.7, 0.6, 0.6, 0.0])
glMaterialf(GL_FRONT, GL_SHININESS, 0.25 * 128.0)
glutSolidTeapot(size)
width, height = 1000, 747
def setup():
pygame.init()
pygame.display.set_mode((width, height), OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
# compute features
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
K = my_calibration((747, 1000))
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
box = cube_points([0, 0, 0.1], 0.1)
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
box_trans = homography.normalize(dot(H, box_cam1))
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
Rt = dot(linalg.inv(K), cam2.P)
setup()
draw_background("book_perspective.bmp")
set_projection_from_camera(K)
set_modelview_from_camera(Rt)
draw_teapot(0.05)
pygame.display.flip()
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()
问题解决:
OpenGL安装
在本地址找合适的版本下载:https://www.lfd.uci.edu/~gohlke/pythonlibs/
安装参考:https://my.oschina.net/u/3018050/blog/1793640
对于可能出现错误:OpenGL.error.NullFunctionError: Attempt to call an undefined function glutInit, check for bool(glutInit) before calling可能是缺少相关dll文件,可以在这里下载到 http://pan.baidu.com/s/1dFhC8G5
参考https://my.oschina.net/u/3018050/blog/1808448