文章目录
摘要
简单的介绍了四旋翼无人机的两种模式的飞行原理
飞行器分类
四旋翼
- “十模式”
- “X模式”
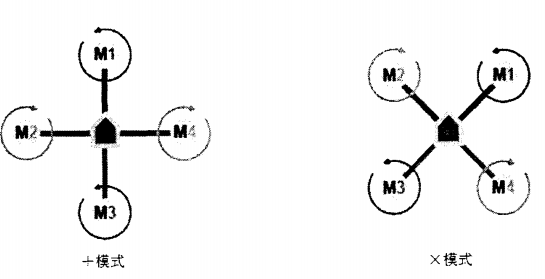
四旋翼“X模式”飞行原理
旋转产生的扭矩符合物理学上的右手螺旋定则;
M1 M2 M3 M4 产生的升力等于重力–>悬停
六自由度
M1 M2 M3 M4 同时增速或减速–>垂直运动
M1 M2 减速 M3 M4 加速–>向前
M1 M2 加速 M3 M4 减速–>向后
M1 M4 加速 M2 M3 减速–>向左
M1 M4 减速 M2 M3 加速–>向右
M1 M3 加速 M2 M4 减速–>向右偏航
M1 M3 减速M2 M4 加速 -->向左偏航
大于,小于也可以,不一定同时加速减速;
四旋翼飞行姿态为“X型”飞行姿态,这种飞行姿态在控制时,可以通过同时控制四个电机的转速来控制四旋翼的飞行姿态,相比“十”型飞行姿态来说控制要复杂,但是,通过同时控制四个电机的方法控制飞行姿态的联动性较好。
四旋翼“十模式”飞行原理
M1 M2 M3 M4 产生的升力等于重力–>悬停
六自由度:
M1 M2 M3 M4 同时增速或减速–>垂直运动
-
俯仰运动
M2 M4 转速不变
M1 减速 M3 加速–>向前
M1 加速 M3 减速–>向后 -
滚转运动
M1 M3 转速不变
M2 加速 M4 减速–>向右
M2 减速 M4 加速 -->向左
M1 M3 加速 M2 M4 减速–>向右偏航
M1 M3 减速 M2 M4 加速 -->向左偏航
参考资料
四旋翼无人机飞行原理
https://blog.csdn.net/qq_27270029/article/details/79877022
【无人机】一文读懂无人机飞行原理
https://blog.csdn.net/np4rHI455vg29y2/article/details/78954871
无人机飞控开发平台培训理论课程
https://www.nuedc-training.com.cn/index/video/details/course_id/62