首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
四旋翼无人机PID控制
其他
2018-05-27 19:30:25
阅读次数: 0
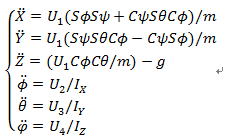
一、建立四旋翼无人机动力学方程
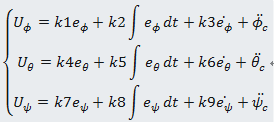
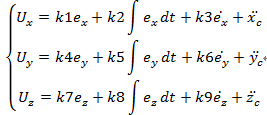
二、确定PID控制律
1、姿态控制回路
2、位置控制回路
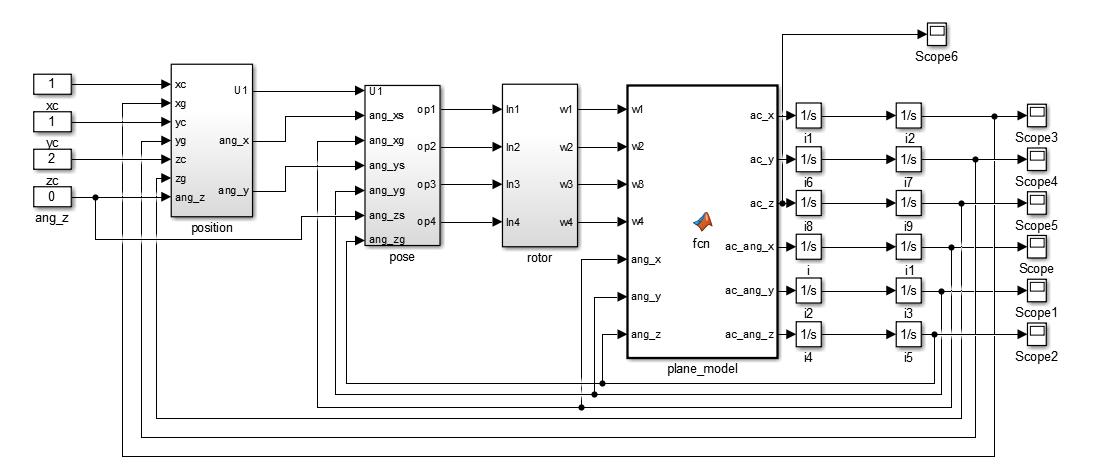
3、仿真图
猜你喜欢
转载自
blog.csdn.net/wangzheweini/article/details/78813942
四旋翼无人机PID控制
m基于PID控制算法的四旋翼无人机飞行控制simulink仿真
【rotors】多旋翼无人机仿真(四)——参数补偿和PID控制
四旋翼无人机从0到1的实现(二十五)无人机工程中PID
【无人机】【2014.12】基于区域覆盖的四旋翼无人机最优路径规划与控制
四旋翼无人机的几何跟踪控制matlab源码
四旋翼无人机的设计与实现讲解
四旋翼无人机设计
“四旋翼”无人机“X模式”飞行原理
四旋翼无人机开发目录
四旋翼无人机使用教程
11.基于STM32C8T6的四旋翼无人机的飞控制作----PID调试方法
多旋翼无人机原理::
4.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备4,四旋翼姿态控制理论
3.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备3,四旋翼姿态控制理论
四旋翼无人机从0到1的实现(二十四)无人机工程中系统控制
m基于内外环PD控制算法的四旋翼无人机飞行控制simulink仿真
技术专栏|多旋翼无人机PID调节经验分享
四旋翼无人机从0到1的实现(十六)无人机MCU驱动→GPIO
笔记:四旋翼无人机从0到1的实现(十一)无人机MCU驱动→PWM
四旋翼无人机从0到1的实现(二十二)无人机工程中滤波
四旋翼无人机从0到1的实现(二十)无人机MCU驱动→SYSTICK
四旋翼无人机从0到1的实现(十四)无人机MCU驱动→UART
四旋翼无人机从0到1的实现(十七)无人机外设驱动→LED
四旋翼无人机从0到1的实现(十五)无人机外设驱动→Receiver
四旋翼无人机从0到1的实现(十九)无人机MCU驱动→ADC
四旋翼无人机从0到1的实现(十八)无人机外设驱动→MPU6500
四旋翼无人机从0到1的实现(十三)无人机MCU驱动→I2C
四旋翼无人机从0到1的实现(十二)无人机外设驱动→MOTOR
【rotors】多旋翼无人机仿真(三)——SE3控制
今日推荐
TIOBE 5 月榜单:Fortran “复活”进入 Top 10
GCC 14.1 发布
面壁智能发布 Eurux-8x22B 开源大模型 —— 堪称「理科状元」
开源日报 | 谷歌扶持鸿蒙上位;开源Rabbit R1;Docker加持的安卓手机;微软的焦虑和野心;海尔电器把开放平台关了
中国码农的“35岁魔咒”
蘭雅 CorelDRAW 插件 2024.5.1 国际劳动节版,免费下载
Arc Browser for Windows 1.0 正式 GA
90后程序员开发视频搬运软件、不到一年获利超 700 万,结局很刑!
周排行
基本数据类型封装类比较 Java源码解读(一) 8种基本类型对应的封装类型
JS实现无缝滚动上
深入解析HashMap原理(基于JDK1.8)
mysql的连接池
关于.htc
linux下的ubuntu12.04图形界面
【数论】好推不好记的扩展欧几里德
设备树详解
cscope + tags 简单设置
xml学习
每日归档
更多
2024-05-09(35)
2024-05-08(42)
2024-05-07(14)
2024-05-06(40)
2024-05-05(0)
2024-05-04(7)
2024-05-03(19)
2024-05-02(0)
2024-05-01(4)
2024-04-30(1)