- Remap topic from D435i to rtabmap
- Feed the odometry to rtabmap
In the rqt_graph of 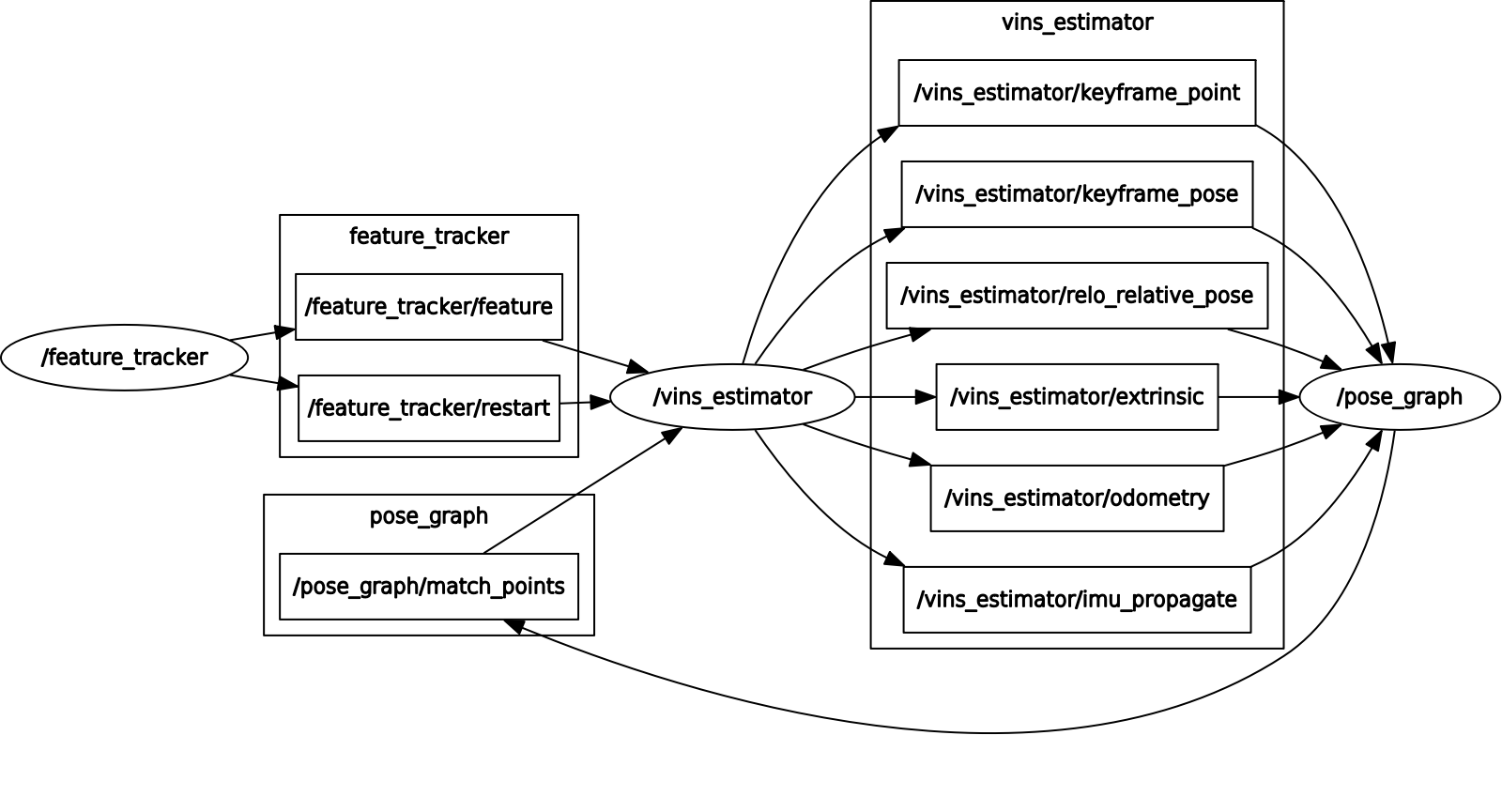 , /vins_estimator/odometry is what rtabmap needs.
, /vins_estimator/odometry is what rtabmap needs.
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false odom_topic:=/camera/imuReferences:
[1] RGB-D Handheld Mapping