A Theory of Catadioptric Image Formation
ICCV 1998
本文主要内容:推导出所有由 单个普通镜头和单个反射面(a single conventional lens and a single mirror)构建的具有 single effective viewpoint 的 catadioptric systems
deriving the entire class of catadioptric systems with a single effective viewpoint and which are constructed just using a single conventional lens and a single mirror
2 The Fixed Viewp oint Constraint
The fixed viewp oint constraint 要求 a catadioptric sensor 只能度量 中经过3D空间一个固定点的光线的亮度。换句话说,the catadioptric sensor 只能采样 在一个固定点的 5-D plenoptic function。(The plenoptic function is the 5-dimensional function representing the intensity or chromacity of the light observed from every position and direction in 3-dimensional space.)这个固定的 3D 点 我们称之为 effective viewpoint
假定我们使用一个普通 camera 作为仅有的 sensing element ,一个 mirror 作为仅有的反射面。如果 camera 是一个理想的 perspective camera,我们忽略 defocus blur, 可以用基于单点的 perspective projection 来建模,即 effecitve pinhole。那么 这个 fixed viewpoint constraint 要求 经过camera 的 effective pinhole 的任何光线,当它没有被 mirror 反射时,它一定通过 这个 effective viewpoint。
2.1 Derivation of the Constraint Equation
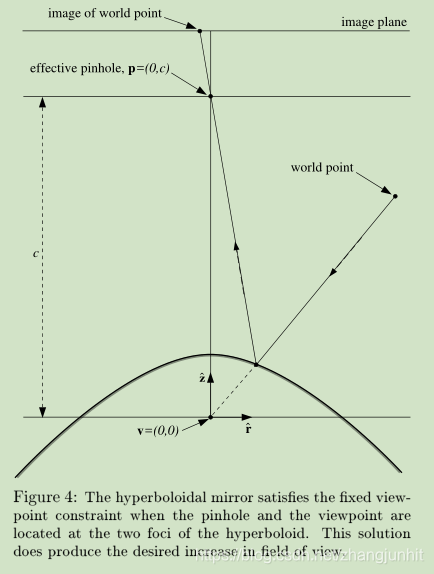
下面我们来推导这个 约束方程 ,我们是根据下图中的点线 几何关系来进行推导的。
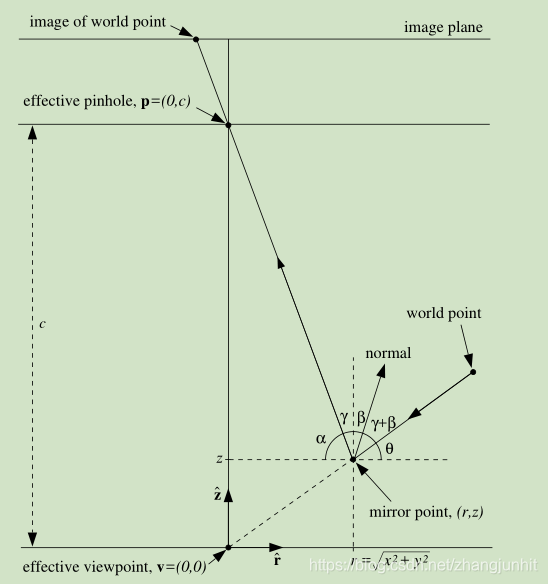
图像中 effective viewpoint, v=(0,0) 我们设置其 at the origin of a cartesian co ordinate system ;
effective pinhole, p=(0,c)
我们假定 z 轴 z^ 的方向为 向量 vp 的方向
world point -> mirror point -> image of world point
假定 mirror point 的坐标为 (r,z), 它是反射面 mirror 上的点。
since perspective projection is rotationally symmetric about any line through p, the mirror can be assumed to be a surface of revolution about the z -axis z^
假定 r^ 为 a unit vector orthogonal to z 轴 z^, try to find the 2-dimensional profile of the mirror z ( r ) = z(x; y) where r*r=x*x+y*y
这里我们目标就是 找到 mirror z® = z(x; y) 在二维平面上的 profile
denoting the angle between an incoming ray from a world point and the r -axis by θ
我们用 θ 表示 入射光线和 r -axis 的夹角
因为入射光线通过原点 v ,
所以有 tan(θ)=z/r
we denote by α the angle b etween the reflected ray and the (negative) r -axis,
我们用 α 表示 反射线和 r -axis(负轴)的夹角, 因为反射线经过 p = (0, c) 点
我们有 tan(α)= (c-z)/r
β is the angle between the z -axis and the normal to the mirror at the point (r,z )
我们用 β 表示 z 轴 和 mirror 在 点 (r,z) 的 法线 normal 的夹角
我们有 -tan(β)= dz/dr
我们最终的几何关系 依赖于假设 mirror 是 specular,镜面反射,也就是说 入射角等于反射角
γ is the angle between the reflected ray and the z -axis
我们用 γ 表示 反射线和 z 轴的 夹角,
则 γ =90-α 和 θ + α +2β+2γ=180
将上面两个公式 消去 γ 得到 2β=α- θ, 对两边去 tan 算子展开

然后我们上面的 tan(α) tan(β) tan(θ) 带入得到下式(fixed viewpoint constraint equation)

2.2 General Solution of the Constraint
solve it as a quadratic to yield an expression for the surface slope 初中的一元二次方程求解

使用 y=z-c/2 带入并设定 b=c/2 得到

使用 2rx=y*y+r*r-b*b 得到
对 r 两边积分得到
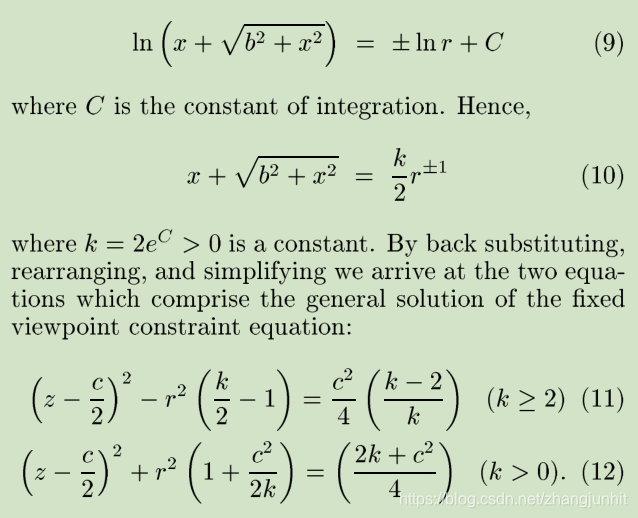
最终我们得到了两组方程, 构成了 the general solution of the fixed viewp oint constraint equation
2.3 Specific Solutions of the Constraint
方程 11 和 12 表示了 整个满足 fixed viewpoint constraint 所有的 mirror 类别
represent the entire class of mirrors that satisfy the fixed viewpoint constraint
我们分析这两个方程可以发现: the mirror profiles are all conic sections (圆锥体切面)
(a conic section (or simply conic) is a curve obtained as the intersection of a cone with a plane. The three types of conic section are the hyperbola, the parabola, and the ellipse) conic section 就是一个圆锥体在一个平面内的 切面 intersection
接下来我们讨论一下上述两个方程的 一些特殊情况
2.3.1 Planar Mirrors
我们设定 k = 2 and c > 0,则得到 cross-section of a planar mirror: z=c/2
这个平面将连接 viewpoint 和 pinhole 的直线段 vp 一分为二。而且这个平面是唯一一个平面解。 这个结果的一个直接推论就是对于任意 一个固定的 pinhole,没有两个不同的平面反射面可以拥有同一个 viewpoint。很不幸的是 单个平面反射面不能增加相机的视野,因为为了减少遮挡,同样的相机从 p 点 移动到 v 点,相机的视野没有任何改变。reflected in the mirror would have exactly the same field of view。因此在保持 fixed viewpoint constraint 的单个普通成像系统中,不可能通过增加任何数量的平面反射面来增加相机的视野。在多个 viewpoint 的条件下通过增加 平面反射面来增加视野。
我们可以将四个独立的成像系统组合到一起,其这四个 viewpoint 重合到一起,这样就满足只有一个 viewpoint。
2.3.2 Conical Mirrors 圆锥反射面
对于 solution(11) 我们设置 c = 0 and k>=2,我们得到一个 圆锥反射面其 对应的圆切面为
Figure2 图示了这种情况
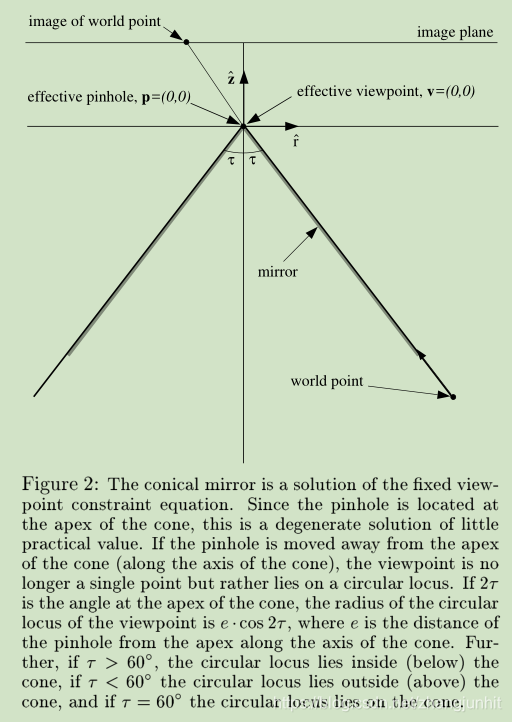
因为 c=0 所以相机的 pinhole 必须位于 cone 的顶点。这就意味着相机只能看到圆锥体内的视野,圆锥外的东西就看不到了。
This implies that the only rays of light entering the pinhole from the mirror are the ones which graze the cone and so do not originate
from (finite extent) objects in the world
所以这个解没有实际意义 : the cone (with the pinhole at the vertex) is a degenerate solution of no practical value
在实际设计中,cone也被用于广角相机系统中,可以将 camera pinhole 远离 cone 的顶点,这样 viewpoint 就不是唯一性。
2.3.3 Spherical Mirrors
对于 solution(12) 假定 c = 0 and k > 0,我们得到球反射面

这个解也没有实际意义。因为 viewpoit 和 pinhole 重合在球心位置,观测者只能看到自身
球反射面也被用于增加相机视野,实际中 the pinhole is placed outside the sphere and so there is no single effective viewp oint.
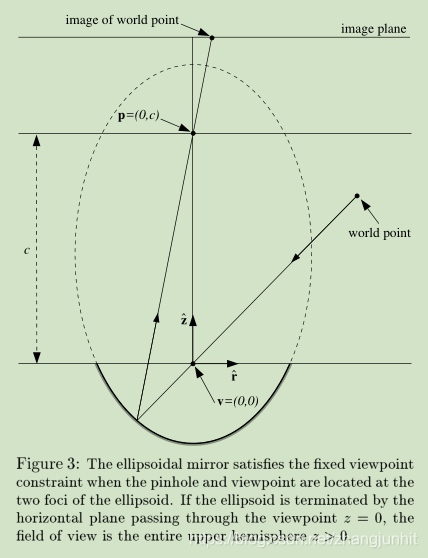
2.3.4 Ellipsoidal Mirrors 椭圆反射面
对于 Solution (12) ,k > 0 and c > 0,我们得到 椭圆反射面
椭圆反射面是第一个在实际中可以用增加视野的解
if the viewpoint and pinhole are at the fo ci of the ellipsoid, and the mirror is taken to be the section of the ellipsoid that lies below the viewp oint (i.e. z < 0), the effective ?eld of view is the entire upper hemisphere z>=0
2.3.5 Hyperboloidal Mirrors 双曲反射面
在 solution(11)中,当 k>2,c>0时,我们得到双曲反射面
双曲反射面也是一个可实现的解
3 Resolution of a Catadioptric Sensor
这里讨论 Catadioptric Sensor 的分辨率问题
4 Defocus Blur of a Catadioptric Sensor
这里讨论了 Catadioptric Sensor 的成像模糊问题
上面两个部分内容没有看了
11