1、关联式容器
前面刚开始整理 STL 容器 时,简单的说了一下容器可以分为两类 序列式容器 和 关联式容器。前面又对主要的 序列式容器 进行了整理,今天终于轮到 关联式容器了。
所谓关联式容器,观念上类似关联式数据库:每笔数据都有一个键值(key)和一个实值(value)。当元素插入到关联式容器中时,容器内部结构便依照其键值大小,以某种特定规则将这个元素放置于适当位置。关联式容器没有所谓头尾(只有最大元素和最小元素),所以不会有所谓 push_back()、push_front()、pop_back()、pop_front()、begin()、end()等操作。
标准的 STL 关联式容器分为 set(集合) 和 map (映射)两大类,以及这两大类的衍生体 multiset(多重集合)和 multimap(多重映射表)。这些容器的底层机制均以 RB-tree (红黑树)完成。RB-tree 也是一个独立容器,但并不开放给外界使用。
此外,还有一些 STL 库提供了一个不再标准规格之列的关联式容器,如hash table,以及以此衍生出的 hash_set、hash_map、hash_multiset、hash_multimap等。
2、树的导览
一般而言,关联式容器的内部结构是一个 balanced binary tree(平衡二叉树),以便获得良好的搜寻效率。balanced binary tree 有许多种类型,包括 AVL-tree、RB-tree、AA-tree,其中最被广泛运用于STL的是 RB-tree(红黑树)。为了探讨 STL 的关联式容器,我们必须先探讨RB-tree。而要探讨 RB-tree,我们需要先来探讨树。
树(tree),在计算机科学里,是一种十分基础的数据结构。几乎所有操作系统都将文件存放在树状结构中,几乎所有的编译器都需要实现衣蛾表达式树;文件压缩所用的哈夫曼算法需要用到树状结构;数据库所使用的 B-tree 则是一种相当复杂的树状结构。
对于树的术语,我在 数据结构第六篇 中有整理。大家感兴趣可以回看一下。
2.1、二叉搜索树(binary search tree)
所谓二叉树搜索树,可提供对数时间的元素插入和访问。二叉搜索树的节点放置规则是:任何节点的键值一定大于其左子树中的每一个节点的键值,并小于其右子树中的每一个节点的键值。因此,从根节点一直往左走,直至无左路可走,即得最小元素;从根节点一直往右走,直至无路可走,即得最大元素。
要在一棵二叉搜索树中找出最大元素或最小元素,是一件极简单的事。比较麻烦的是元素的插入和移除。
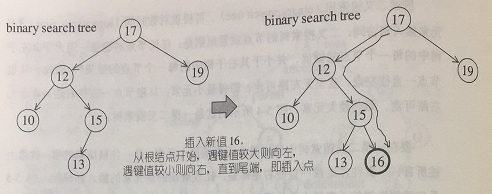
插入操作:从根节点开始,遇键值较大者就向左,遇键值较小者就向右,一直到尾端,即为插入点。如下图所示:
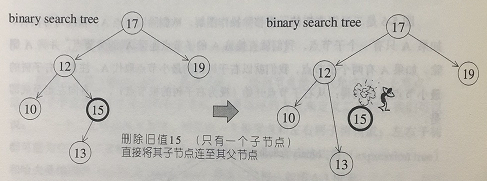
移除操作分为两种情况:
1、如果 A 只有一个子节点,我们就直接将 A 的子节点连至 A 的父节点,并将 A 删除。如下图:
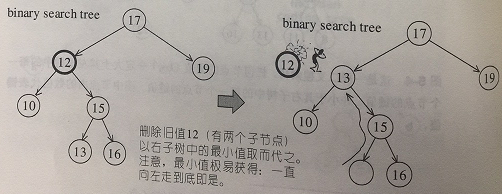
2、如果 A 有两个子节点,我们就以右子树内的最小节点取代 A。注意,右子树的最小节点极易获得,从右子节点开始,一直向左走至底即是。如下图所示:
2.2、平衡二叉搜索树(balanced binary search tree)
有时因为输入值不够随机,有时因为经过某些插入或删除操作,二叉搜索树可能会失去平衡,造成搜索效率低落的情况,如下图所示:

所谓树形平衡与否,并没有一个绝对的测量标准。“平衡”的大致意义是:没有任何一个节点过深。不同的平衡条件,早就出不同的效率表现,以及不同的实现复杂度。有数种特殊结构如 AVL-tree、RB-tree、AA-tree,均可实现出平很二叉搜索树,它们都比一般的二叉搜索树复杂,因此,插入节点和删除节点的平均时间也比较长,但是它们可以避免极难应付的最坏情况,而且由于它们总是保持某种程度的平衡,所以元素的访问时间平均而言也就比较少。一般而言其搜寻时间可节省25%左右。
2.3、AVL tree(adelson-velskii-landis tree)
AVL tree 是一个 “加上了额外平衡条件” 的二叉搜索树。其平衡条件的建立是为了确保整棵树的深度为 O(logN)。直观上的最佳平衡条件是每个节点的左右子树有着相同的高度,但我们很难插入新元素而又保持 这样的平衡条件。AVL tree 于是退而求其次,要求任何节点的左右子树高度相差最多 1。
下图所示的是一个AVL tree,插入了节点 11 之后,灰色节点违反 AVL tree 的平衡条件。由于只有 “插入点至根节点” 路径上的各节点可能改变平衡状态,因此,只要调整其中最深的那个节点,便可使整棵树重新获得平衡。

前面说过,只要调整 “插入点至根节点” 路径上,平衡状态被破坏之各节点中最深的那一个,便可使整棵树重新获得平衡。假设该最深节点为 X,由于节点最多拥有两个子节点,而所谓 “平衡被破坏” 意味着 X 的左右两颗子树的高度相差 2,因此我们可以轻易将情况分为四种:
1、插入点位于 X 的左子节点的左子树----左左
2、插入点位于 X 的左子节点的右子树----左右
3、插入点位于 X 的右子节点的左子树----右左
4、插入点位于 X 的右子节点的右子树----右右
情况1、4彼此对称,称为外侧插入,可以采用单旋转操作调整解决。情况2、3彼此对称,称为内侧插入,可以采用双旋转操作调整解决。

2.3.1、单旋转(Single Rotation)
在外侧插入状态中,k2 “插入前平衡,插入后不平衡” 的唯一情况如图左侧所示。A 子树成长了一层,致使它比 C 子树的深度多 2。B 子树不可能和 A 子树位于同一层,否则 k2 在插入前就处于不平衡状态了。 B子树也不可能和 C 子树位于同一层,否则第一个违反平衡条件的将是k1 而不是 k2。

为了调整平衡状态,我们希望将 A 子树提高一层,并将 C 子树下降一层,调整之后如上图右侧的图形。我们可以这么想象,把k1 向上提起,使 k2 自然下滑,并将 B 子树挂到 k2 的左侧。这么做是因为,二叉搜索树的规则使我们知道, k2 > k1,所以 k2 必须成为新树形中的 k1 的右子节点。二叉搜索树的规则也告诉我们, B子树的所有节点的键值都在 k1 和 k2 之间,所以新树形中的 B 子树必须落在 k2 的左侧。
以上所有的调整操作只需要将指针稍作修改就可迅速达成。
2.3.2、双旋转(Double Rotation)
对于内侧插入造成的不平衡状态,单旋转无法解决这种情况,如下图所示:
 这种情况下,可以通过两次单旋转来满足 AVL-tree的平衡条件,所以叫双旋转。具体的操作是在 k1 和 k2 之间做一次单旋转,然后在 k2 和 k3 之间在做一次单旋转,如下图所示:
这种情况下,可以通过两次单旋转来满足 AVL-tree的平衡条件,所以叫双旋转。具体的操作是在 k1 和 k2 之间做一次单旋转,然后在 k2 和 k3 之间在做一次单旋转,如下图所示:
 因为RB-tree 也用到了 单旋转 和 双旋转,代码会在 RB-tree 中进行整理,感兴趣的可以前往查看。
因为RB-tree 也用到了 单旋转 和 双旋转,代码会在 RB-tree 中进行整理,感兴趣的可以前往查看。
感谢大家,我是假装很努力的YoungYangD(小羊)。
参考资料:
《STL源码剖析》