优先级和时间片是线程的两个重要参数,分别描述了线程竞争处理器资源的能力和持有处理器时间长短的能力。
线程优先级
RT-Thread 最大支持256个优先级(数值越小,优先级越高。0为最高优先级,最低优先级预留给空闲线程)
用户可以通过rt_config.h 中的RT_THREAD_PRIORITY_MAX 宏来修改最大支持的优先级;
针对STM32 默认设置最大支持32个优先级;
具体应用中,线程总数不受限制,能创建的线程总数只和具体硬件平台的内存相关。
线程时间片
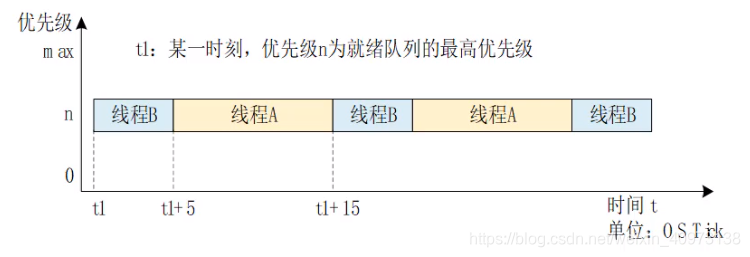
时间片只有在相同优先级的就绪状态线程中起作用,系统对优先级相同的就绪状态线程采用时间片轮询的调度方式进行调度时,时间片起到约束线程单次运行时长的作用,其单位是一个系统节拍(OS Tick)
假设有2个优先级相同的就绪状态线程A 与B,A 线程的时间片设置为10,B 线程的时间片设置为5,那么当系统中不存在比A 优先级高的就绪状态线程时,系统会在A、B 线程间来回切换执行,并且每次对A 线程执行10个节拍的时长,对B 线程执行5个节拍的时长
线程调度规则
优先级抢占调度
操作系统总是让具有最高优先级的就绪状态任务优先运行:即当有任务的优先级高于当前任务优先级并且处于就绪状态,就会发生任务调度。
通过优先级抢占机制,最大限度满足系统的实时性。
时间片轮询调度
当操作系统中存在相同优先级的线程时(优先级相同的任务不会抢占),操作系统就会按照设置的时间片大小来轮流调度线程,时间片起到约束线程单次运行时长的作用,其单位是一个系统节拍(OS Tick)。
通过时间片轮询,保证优先级相同的任务能够轮流占有处理器。
示例代码:
static void thread_entry(void *parameter)
{
rt_uint32_t value;
rt_uint32_t count = 0;
value = (rt_uint32_t)parameter;
while (1)
{
if (0 == (count % 5))
{
rt_kprintf("thread %d is running ,thread %d count = %d\n", value, value, count);
if (count > 200)
return;
}
count++;
}
}
int timeslice_sample(void)
{
rt_thread_t tid = RT_NULL;
/* 创建线程1 */
tid = rt_thread_create("thread1",
thread_entry, (void *)1,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid != RT_NULL)
rt_thread_startup(tid);
/* 创建线程2 */
tid = rt_thread_create("thread2",
thread_entry, (void *)2,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE - 5);
if (tid != RT_NULL)
rt_thread_startup(tid);
return 0;
}