Platform: RK3399
OS: Android 7.1
Kernel: v4.4.83
驱动文件:
dw-hdmi.c: HDMI驱动,包括内部I2C接口实现。
drm_edid.c: edid相关。
dw_hdmi-rockchip.c: drm框架部分。
探测引脚
HPD(Hotplug Dectect)用于监测HDMI设备是否存在,为high那么可以通过DDC去读EDID,HDMI有规定在HDMI 5vAC断电时source device可以读reciever device的EDID,也就是需要Hotplug为High。其中有两种Hotplug相关的情况会导致HDMI被识别为DVI:
- Hotplug为High,不过EDID并没有准备好,那么信号源设备会由于无法读到EDID而认为接收设备为DVI,这样会导致HDMI有图像无声的问题。
- Hotplug为Low,也会导致信号源无法读到EDID而认为接收设备为DVI,从而导致HDMI有图无声。
插拔是否成功可以在check_hdmi_irq()@dw-hdmi.c中打印log。
I2C部分:
I2C主要用于读取EDID,内部框图如下:
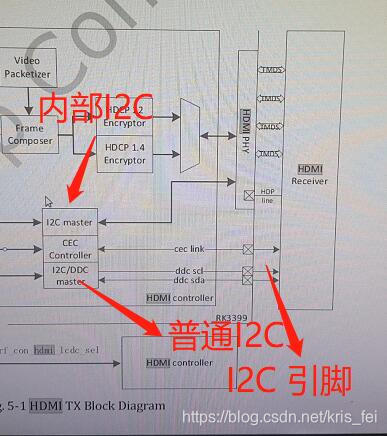
分内部I2C和普通I2C两种。
普通的I2C可以配置到任何一路,和正常外设使用一样。DTS配置ddc-i2c-bus属性即可:
&hdmi {
status = "okay";
ddc-i2c-bus = <&i2c4>; //选择硬件对应使用的I2C
};
内部的I2C只能使用I2C3, 可以从寄存器文档得知:

对应DTS配置:
hdmi:hdmi@ff940000 {
......
pinctrl-names = "default";
pinctrl-0 = <&hdmi_i2c_xfer>;
......
}
hdmi {
hdmi_i2c_xfer: hdmi-i2c-xfer {
rockchip,pins =
<4 17 RK_FUNC_3 &pcfg_pull_none>,
<4 16 RK_FUNC_3 &pcfg_pull_none>;
};
};
如果使用了内部I2C,普通的I2C是无法使用的。(被复用了)
如果使用了普通I2C,也需要把pinctrl-0属性给注释掉,否则会导致普通I2C无法正常使用。
代码逻辑上优先使用普通I2C。
不管是内部还是普通I2C,都可以在HDMI的I2C引脚测量到信号。一开始我看框图以为是普通I2C才会有信号。
关于EDID:
EDID格式:

位元組序列
0x00-0x13: 標頭資訊
0x00–0x07: 標頭資訊 “00h FFh FFh FFh FFh FFh FFh 00h”
0x08–0x09: 製造商ID。 這個識別碼是經由微軟來分配。
"00001=A”; “00010=B”; … “11010=Z”,每個字元是5bits。 第7bit (位址 08h) 是0, 第一個字元(字母)
是位於bit 6 ~ 2 (位址 08h), 第二個字元(字母)是位於bit 1和0 (位址 08h) 和 bit7 ~ 5
(位址 09h),第三個字元(字母)是位於bit4 ~ 0 (位址 09h)。
Ex:
製造商ID : CEA -> 00011 00101 00001
EDID Byte 8~9: 0CA1
0x0A–0x0B: 生產ID碼 (儲存方式是LSB開始)。 由製造商分配。
0x0C–0x0F: 32位元序號。 非必需格式。 通常儲存由 LSB 優先。為了去維持和之前需求的相容性,假如一個ASCII
序號在詳細時脈部分被提供,這個欄位應該設定至少一個位元組不是零。
0x10: 製造週。 這個由製造商改變。 法一是去計算一月的 1-7 當做第一週,一月 8-15 當做第二週並且以此
類推。 一些計算是以星期幾(星期日-星期六)為基礎。有效範圍是 1-54。
0x11: 製造年份。 加上1990才是確實的年份。
0x12: EDID 版本號碼。 “01h”
0x13: EDID 修訂版號碼。 “03h”
0x14-0x18: 基本顯示參數
0x14: 影像輸入定義
位元 7: 0=類比, 1=數位
假如 位元 7 是數位:
位元 0: 1=相容DFP 1.x
假如 位元 7 是類比:
位元 6-5: 影像等級
00=0.7, 0.3, 01=0.714, 0.286, 10=1, 0.4 11=0.7, 0
bit 4: 白黑設定
bit 3: 分離同步
bit 2: 合成同步
bit 1: 綠色同步
bit 0: 鋸齒垂直同步
0x15: 最大水平圖形尺寸 (單位為公分)。
0x16: 最大垂直圖形尺寸 (單位為公分)。
0x17: 顯示伽瑪。 除以100再加1才是真正的值。
0x18: 電源管理和支援的特徵:
bit 7: 待命
bit 6: 暫停
bit 5: 活躍關閉/低電源
bit 4-3: 顯示型態
00=黑白, 01=RGB 色彩, 10=非 RGB 多色彩, 11=未定義
bit 2: 標準色彩空間
bit 1: 偏好時脈模式
bit 0: 預設 GTF 支援
0x19-0x22: 色度調節
0x19: 低有效位關於紅色 X1X0 (位元 7-6), 紅色 Y1Y0 (位元 5-4), 綠色 X1X0 (位元 3-2),
綠色 Y1Y0 (位元 1-0)。
0x1A: 低有效位關於藍色 X1X0 (位元 7-6), 藍色 Y1Y0 (位元 5-4), 白色 X1X0 (位元 3-2),
白色 Y1Y0 (位元 1-0)。
0x1B–0x22: 高有效位關於紅色 X9-2, 紅色 Y9-2, 綠色 X9-2, 綠色 Y9-2, 藍色 X9-2,
藍色 Y9-2, 白色 X9-2, 白色 Y9-2。
正確值是介於0.000和0.999,但編碼值是介於000h和3FFh。
0x23: 建立時脈 I
位元 7-0: 720×400@70 Hz, 720×400@88 Hz, 640×480@60 Hz, 640×480@67 Hz,
640×480@72 Hz, 640×480@75 Hz, 800×600@56 Hz, 800×600@60 Hz
0x24: 建立時脈 II
位元 7-0: 800×600@72 Hz, 800×600@75 Hz, 832×624@75 Hz, 1024×768@87 Hz (交錯的),
1024×768@60 Hz, 1024×768@70 Hz, 1024×768@75 Hz, 1280×1024@75 Hz
0x25: 製造商保留的時脈
00h 是無
位元 7: 1152x870 @ 75 Hz (麥金塔 II, 蘋果)
0x24–0x35: 標準時脈識別。
第一個位元組
水平結果。 加上31,再乘上8, 得到正確值。
第二個位元組
位元 7-6: 外觀比例。 正確的垂直結果依賴水平結果。
00=16:10, 01=4:3, 10=5:4, 11=16:9 (00=1:1 在v1.3之前)
位元 5-0: 垂直頻率。 加上 60 去得到正確的值。
0x36–0x47: 詳細時脈描述 1
0x36–0x37: 像素時脈 (單位為 10 kHz) 或 0 (55 MSB 54 LSB)
假如像素時脈並非無效:
0x38: 水平活躍 (單位為像素)
0x39: 水平空白 (單位為像素)
0x3A: 水平活躍高 (4 高位元)
水平空白高 (4 低位元)
0x3B: 垂直活躍 (單位為線)
0x3C: 垂直空白 (單位為線)
0x3D: 垂直活躍在高有效位 (4 高位元)
垂直空白在高有效位 (4 低位元)
0x3E: 水平同步偏移量 (單位為像素)
0x3F: 水平同步脈沖寬度 (單位為像素)
0x40: 垂直同步偏移量 (單位為線) (4 高位元)
垂直同步脈沖寬度 (單位為線) (4 低位元)
0x41: 高有效位關於水平同步偏移量 (位元 7-6)
高有效位關於水平同步脈沖寬度 (位元 5-4)
高有效位關於垂直同步偏移量 (位元 3-2)
高有效位關於垂直同步脈沖寬度 (位元 1-0)
0x42: 水平圖像尺寸 (單位為公釐)
0x43: 垂直圖像尺寸 (單位為公釐)
0x44: 高有效位關於水平圖像尺寸 (4 高位元)
高有效位關於垂直圖像尺寸 (4 低位元)
0x45: 水平邊界線 (單位為像素且只表示一邊)
0x46: 垂直邊界線 (單位為線且只表示一邊)
0x47: 交錯與否 (位元 7)
立體與否 (位元 6-5) (“00” 表示否)
分離同步與否 (位元 4-3)
垂直同步正與否 (位元 2)
水平同步正與否 (位元 1)
立体模式 (位元 0) (若是6-5 是 00 則沒使用)
假如像素時脈是無效:
0x38: 0
0x39: 區塊型態
FFh=監視器序號, FEh=ASCII 字串, FDh=監視器變動限制, FCh=監視器名稱,
FBh=色彩點資料, FAh, 標準時脈資料, F9h=現在未定義,
0Fh=由製造商定義
0x3A: 0
0x3B–0x47: 區塊內容描述符。
假如區塊型態是 FFh, FEh, 或 FCh, 整個區域是字串。
假如區塊型態是 FDh:
0x3B–0x3F:
最小垂直頻率, 最大垂直頻率,
最小水平頻率 (單位為 kHz), 最大水平頻率 (單位為 kHz), 像素時脈
(單位為 MHz (正確值需乘上10))
0x40–0x41: 第二 GTF 觸發器
假如編碼值是 000A, 位元組 59-63 是使用。 假如編碼值是 0200,
位元組 67–71 是使用。
0x42: 開始水平頻率 (單位為 kHz)。 乘上2得到實際值。
0x43: C。 除以 2 得到實際值。
0x44-0x45: M (以LSB優先儲存)。
0x46: K
0x47: J。 除以 2 得到實際值。
假如區塊型態是 FBh:
0x3B: W 索引 0。 假如設定成 0, 位元組 60-63 是沒使用。 假如設定成 1, 61–63 是
分配到白點索引 #1
0x40: W 索引 1。 假如設定成 0, 位元組 65-68 是沒使用。 假如設定成 2, 65–68 是
分配到白點索引 #2
白點索引結構:
第一個位元
位元 3-2: 低有效位關於白 X (位元 3-2), 白 Y (位元 1-0)
第二到第三位元組: 高有效位關於白 X, 白 Y。
第四位元組: 伽瑪。 除以100, 再加上1得到實際值。
解碼白 X 和白 Y, 看位元組 25-34。
假如區塊型態是 FAh:
0x3B–0x46: 標準時脈識別。 2 位元組對於每一個紀錄。
關於結構細節, 看位元組 38-53。
0x48–0x59: 詳細時脈描述 2 或監視器描述符
0x5A–0x6B: 詳細時脈描述 3 或監視器描述符
0x6C–0x7D: 詳細時脈描述 4 或監視器描述符
0x7E: 額外的旗標。 額外的數值採用這個區塊。
在EDID 1.3之前, 這是被忽略的, 並且應該被設成 0。
0x7F: 校驗和 - 這個位元組應該被程式化使得所有 128 位元組的加總等於 00h.
EDID读取:
rk3399_mid:/sys/class/drm/card0-HDMI-A-1 # cat edid > /data/edid.bin
如果I2C不通,那么读取失败为空,读取成功则是二进制文件。
EDID读取失败之后CPU端无法得知HDMI屏支持的分辨率,默认会选择一组分辨率(当前是1024x768)进行显示。
分辨率:
屏幕支持分辨率读取:
rk3399_mid:/sys/class/drm/card0-HDMI-A-1 # cat modes
1600x900p60
1920x1080p60
1920x1080p60
1920x1080i60
1920x1080i60
1920x1080p50
1920x1080i50
1280x960p60
1360x768p60
1280x800p60
1280x720p60
1280x720p60
1280x720p50
1024x768p75
1024x768p70
1024x768p60
800x600p75
800x600p72
800x600p60
800x600p56
720x576p50
720x576i50
720x480p60
720x480p60
720x480i60
720x480i60
640x480p75
640x480p73
640x480p60
640x480p60
720x400p70
当前分辨率读取:
rk3399_mid:/sys/class/drm/card0-HDMI-A-1 # cat mode
640x480p75
分辨率设置:
- 通过settings -> display -> HDMI
- 通过命令行
如:
set persist.sys.resolution.aux 1024x768@60
每次设置完更新 sys.display.timeline(每次加 1)使分辨率生效
setprop sys.display.timeline 1
参考:
https://zh.wikipedia.org/wiki/EDID
HDMI介绍与流程
Rockchip 基于DRM框架的HDMI开发指南 v1.2-20190226.pdf