在Ubuntu系统中接上usb摄像头设备时,系统会自动安装对应的usb设备驱动程序。
我们现在要使用自己编译的vivi驱动,该怎么办呢?
1.先安装系统自带的vivi驱动和它所依赖的所有驱动:sudo modprobe vivi ;
2.卸载原有的vivi驱动 : sudo rmmod vivi ;
3.装载自己的驱动 :sudo insmod ./vivi.ko ;
然后 ls /dev/video* ,可以看到有一个video设备节点 /dev/video0 ,即对应的是vivi虚拟出来的视频设备。
我们可以直接阅读xawtv源码,从main函数开始一路分析它调用vivi驱动的过程,但是这个过程会非常漫长,因为它除了调用vivi驱动之外
,还会做许多其他的准备工作。我们可以通过strace 这个命令来跟踪调用过程。
本文目的:
(通过追踪应用程序xawtv调用驱动vivi的过程,使之生成对应的TXT文件,在文件中搜索 /dev/video*字段,得到一系列函数,再打开xawtv源码,得到vivi驱动必须的系统调用,进而分析驱动框架)
一、xawtv所涉及的vivi驱动的系统调用
使用方法 :执行 strace -o xawtv.txt xawtv ,生成了调用过程xawtv.txt
搜索 /dev/video0,得到如下:
open("/dev/video0", O_RDWR|O_LARGEFILE) = 4
ioctl(4, VIDIOC_QUERYCAP or VT_OPENQRY, 0x95b8998) = -1 EINVAL (Invalid argument)
close(4) = 0
open("/dev/video0", O_RDWR|O_LARGEFILE) = 4
.....
发现打开了两次,open成功之后得到file_fd =4,后面有一大堆ioctl,把所有的ioctl列举出来,即可得到ioctl的过程:


open("/dev/video0", O_RDWR|O_LARGEFILE) = 4 ioctl(4, VIDIOC_QUERYCAP or VT_OPENQRY, 0xbff6c704) = 0 ioctl(4, VIDIOC_G_FMT or VT_SENDSIG, 0xbff6c638) = 0 ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, 0xc02c564a, 0xbff6c518) = -1 EINVAL (Invalid argument) ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, 0xc02c564a, 0xbff6c518) = -1 EINVAL (Invalid argument) ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, 0xc02c564a, 0xbff6c518) = -1 EINVAL (Invalid argument) ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = 0 ioctl(4, VIDIOC_ENUM_FMT or VT_SETMODE, 0xbff6c5ac) = -1 EINVAL (Invalid argument) ioctl(4, VIDIOC_QUERYCAP or VT_OPENQRY, 0xbff6c544) = 0 ioctl(4, VIDIOC_G_INPUT, 0xbff6c3ec) = 0 ioctl(4, VIDIOC_ENUMINPUT, 0xbff6c3ec) = 0
xawtv涉及的vivi驱动的系统调用:
// 1~7都是在v4l2_open里调用 1. open 2. ioctl(4, VIDIOC_QUERYCAP // 3~7 都是在get_device_capabilities里调用 3. for() ioctl(4, VIDIOC_ENUMINPUT // 列举输入源,VIDIOC_ENUMINPUT/VIDIOC_G_INPUT/VIDIOC_S_INPUT不是必需的 4. for() ioctl(4, VIDIOC_ENUMSTD // 列举标准(制式), 不是必需的 5. for() ioctl(4, VIDIOC_ENUM_FMT // 列举格式 6. ioctl(4, VIDIOC_G_PARM 7. for() ioctl(4, VIDIOC_QUERYCTRL // 查询属性(比如说亮度值最小值、最大值、默认值) // 8~10都是通过v4l2_read_attr来调用的 8. ioctl(4, VIDIOC_G_STD // 获得当前使用的标准(制式), 不是必需的 9. ioctl(4, VIDIOC_G_INPUT 10. ioctl(4, VIDIOC_G_CTRL // 获得当前属性, 比如亮度是多少 11. ioctl(4, VIDIOC_TRY_FMT // 试试能否支持某种格式 12. ioctl(4, VIDIOC_S_FMT // 设置摄像头使用某种格式 // 13~16在v4l2_start_streaming 13. ioctl(4, VIDIOC_REQBUFS // 请求系统分配缓冲区 14. for() ioctl(4, VIDIOC_QUERYBUF // 查询所分配的缓冲区 mmap 15. for () ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列 16. ioctl(4, VIDIOC_STREAMON // 启动摄像头 // 17里都是通过v4l2_write_attr来调用的 17. for () ioctl(4, VIDIOC_S_CTRL // 设置属性 ioctl(4, VIDIOC_S_INPUT // 设置输入源 ioctl(4, VIDIOC_S_STD // 设置标准(制式), 不是必需的 // v4l2_nextframe > v4l2_waiton 18. v4l2_queue_all v4l2_waiton for () { select(5, [4], NULL, NULL, {5, 0}) = 1 (in [4], left {4, 985979}) ioctl(4, VIDIOC_DQBUF // de-queue, 把缓冲区从队列中取出 // 处理, 之以已经通过mmap获得了缓冲区的地址, 就可以直接访问数据 ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列 }
由上可知xawtv的几大函数:
1. v4l2_open
2. v4l2_read_attr/v4l2_write_attr
3. v4l2_start_streaming
4. v4l2_nextframe/v4l2_waiton
摄像头驱动程序必需的11个ioctl:
// 表示它是一个摄像头设备 .vidioc_querycap = vidioc_querycap, /* 用于列举、获得、测试、设置摄像头的数据的格式 */ .vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap, .vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap, .vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap, .vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, /* 缓冲区操作: 申请/查询/放入队列/取出队列 */ .vidioc_reqbufs = vidioc_reqbufs, .vidioc_querybuf = vidioc_querybuf, .vidioc_qbuf = vidioc_qbuf, .vidioc_dqbuf = vidioc_dqbuf, // 启动/停止 .vidioc_streamon = vidioc_streamon, .vidioc_streamoff = vidioc_streamoff,
分析数据的获取过程:
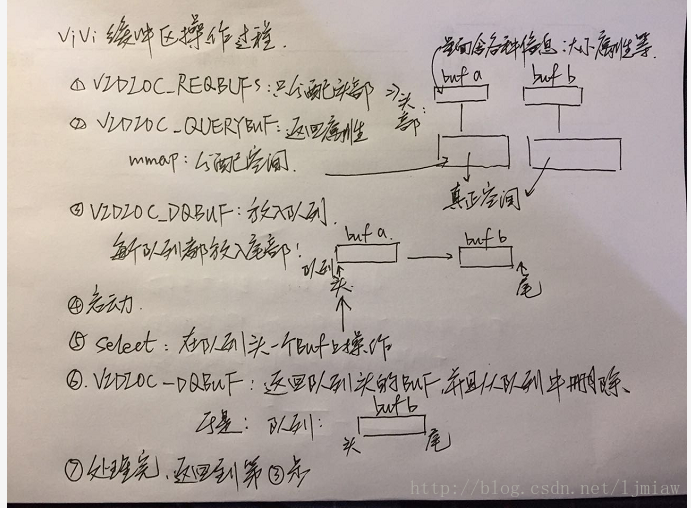
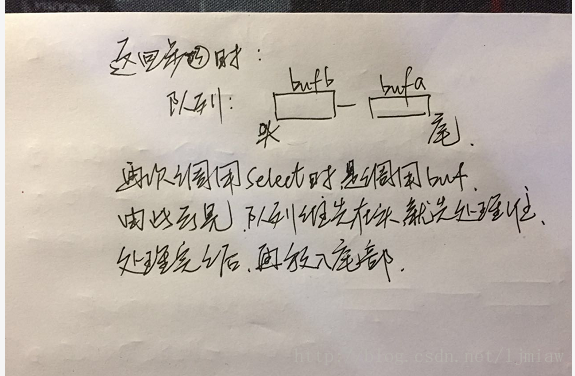
1. 请求分配缓冲区: ioctl(4, VIDIOC_REQBUFS // 请求系统分配缓冲区 videobuf_reqbufs(队列, v4l2_requestbuffers) // 队列在open函数用videobuf_queue_vmalloc_init初始化 // 注意:这个IOCTL只是分配缓冲区的头部信息,真正的缓存还没有分配呢 //在驱动程序有一条原则,这些资源只有在我们用到的时候才进行分配 2. 查询映射缓冲区: ioctl(4, VIDIOC_QUERYBUF // 查询所分配的缓冲区 videobuf_querybuf // 获得缓冲区的数据格式、每一行长度、高度、缓冲区使用状态、在内核空间的偏移地址、缓冲区长度等 mmap(参数里有"大小") // 在这里才分配缓存 v4l2_mmap vivi_mmap videobuf_mmap_mapper videobuf-vmalloc.c里的__videobuf_mmap_mapper mem->vmalloc = vmalloc_user(pages); // 在这里才给缓冲区分配空间 3. 把缓冲区放入队列: ioctl(4, VIDIOC_QBUF // 把缓冲区放入队列 videobuf_qbuf q->ops->buf_prepare(q, buf, field); // 调用驱动程序提供的函数做些预处理 list_add_tail(&buf->stream, &q->stream); // 把缓冲区放入队列的尾部 q->ops->buf_queue(q, buf); // 调用驱动程序提供的"入队列函数" 4. 启动摄像头 ioctl(4, VIDIOC_STREAMON videobuf_streamon q->streaming = 1; 5. 用select查询是否有数据 // 驱动程序里必定有: 产生数据、唤醒进程 v4l2_poll vdev->fops->poll vivi_poll videobuf_poll_stream // 从队列的头部获得缓冲区 buf = list_entry(q->stream.next, struct videobuf_buffer, stream); // 如果没有数据则休眠,在buf->done这里进行休眠 poll_wait(file, &buf->done, wait); 谁来产生数据、谁来唤醒它? 内核线程vivi_thread每30MS执行一次,它调用 vivi_thread_tick vivi_fillbuff(fh, buf); // 构造数据 wake_up(&buf->vb.done); // 唤醒进程 6. 有数据后从队列里取出缓冲区 // 有那么多缓冲区,APP如何知道哪一个缓冲区有数据?调用VIDIOC_DQBUF ioctl(4, VIDIOC_DQBUF vidioc_dqbuf // 在队列里获得有数据的缓冲区 retval = stream_next_buffer(q, &buf, nonblocking); // 把它从队列中删掉 list_del(&buf->stream); // 把这个缓冲区的状态返回给APP videobuf_status(q, b, buf, q->type); 7. 应用程序根据VIDIOC_DQBUF所得到缓冲区状态,知道是哪一个缓冲区有数据 就去读对应的地址(该地址来自前面的mmap)
总结数据获取过程:(图片来自:https://blog.csdn.net/ljmiaw/article/details/72801456)
怎么写摄像头驱动程序:
1. 分配video_device:video_device_alloc
2. 设置
.fops
.ioctl_ops (里面需要设置11项)
如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
3. 注册: video_register_device
怎么写摄像头驱动程序:
1. 分配video_device:video_device_alloc
2. 设置 .fops .ioctl_ops (里面需要设置11项) 如果要用内核提供的缓冲区操作函数,还需要构造一个videobuf_queue_ops
3. 注册: video_register_device