在使用A星算法和物体布局的过程中,常常会使用的网格的概念,即建立在网格的基础上,会使得游戏的相关编程变得简单的多。
格子的代码:
using System.Collections; using System.Collections.Generic; using UnityEngine; [System.Serializable] public class Node { public Vector3 _worldPos;//格子中心点的位置 public int _gridX, _gridY;//在网格列表的下标 public Node(Vector3 Position, int x, int y) { _worldPos = Position; _gridX = x; _gridY = y; } }
网格代码:
using System.Collections; using System.Collections.Generic; using UnityEngine; //网格,网格的起点是在左下角,终点是右上角 public class Grid : MonoBehaviour { public static Grid instance; private Node[,] grid;//网格 public Vector2 gridSize;//网格横纵大小 public float nodeRadius;//格子的半径 private float nodeDiameter;//格子的直径 public int gridCntX, gridCntY;//两个方向上的网格数量 //Test public Transform tarTrans;//目标 public Node tar; public float dir;//射程 //目标区域 public Node zoneLeftDown;//网格的左下角 public Node zoneRightUp;//网格的右上角 Vector3 pos = new Vector3(); // Start is called before the first frame update void Awake() { instance = this; nodeDiameter = nodeRadius * 2; gridCntX = Mathf.RoundToInt(gridSize.x / nodeDiameter); gridCntY = Mathf.RoundToInt(gridSize.y / nodeDiameter); grid = new Node[gridCntX, gridCntY]; CreateGrid(); } private void Update() { /* //获取到玩家所在的网格点 tar = GetFromPosition(tarTrans.position); //获取射程网格区域 zoneLeftDown = GetFromPosition(tarTrans.position - new Vector3(dir, dir)); zoneRightUp = GetFromPosition(tarTrans.position + new Vector3(dir, dir)); //获取一个随机点 if (Input.GetKeyDown(KeyCode.Space)) { int i = Random.Range(zoneLeftDown._gridX, zoneRightUp._gridX+1); int j = Random.Range(zoneLeftDown._gridY, zoneRightUp._gridY+1); pos = grid[i, j]._worldPos; } */ } //创建网格,起始点在左下角 private void CreateGrid() { //获得网格的左下角的坐标 Vector3 startPoint = transform.position - gridSize.x / 2 * Vector3.right - gridSize.y / 2* Vector3.up; for (int i = 0; i < gridCntX; i++) { for (int j = 0; j < gridCntY; j++) { Vector3 worldPoint = startPoint + Vector3.right * (i * nodeDiameter + nodeRadius) + Vector3.up * (j * nodeDiameter + nodeRadius); grid[i, j] = new Node(worldPoint, i, j); } } } //获取某个坐标处的格子 public Node GetFromPosition(Vector3 position) { //首先获得该坐标相对于网格的宽高的百分比 float percentX = (position.x + gridSize.x / 2) / gridSize.x; float percentY = (position.y + gridSize.y / 2) / gridSize.y; //保证百分比值在0到1之间 percentX = Mathf.Clamp01(percentX); percentY = Mathf.Clamp01(percentY); int x = Mathf.RoundToInt((gridCntX - 1) * percentX); int y = Mathf.RoundToInt((gridCntY - 1) * percentY); return grid[x, y]; } //获取一个正方形区域中随机点,length为区域的边长 public Vector3 GetZoneRandomPos(Vector3 center,float length) { //射程一定要大于等于0 //float len = Mathf.Abs(length) / 2; //获取射程网格区域 zoneLeftDown = GetFromPosition(center - new Vector3(length, length)); zoneRightUp = GetFromPosition(center + new Vector3(length, length)); //获取并返回射程网格区域中的一个随机点 int i = Random.Range(zoneLeftDown._gridX, zoneRightUp._gridX); int j = Random.Range(zoneLeftDown._gridY, zoneRightUp._gridY); return grid[i, j]._worldPos; } //获取整个区域中的一个随机点 public Vector3 GetZoneRandomPos() { int i = Random.Range(0, gridCntX); int j = Random.Range(0, gridCntY); return grid[i, j]._worldPos; } private void OnDrawGizmos() { //绘制网格边界线 Gizmos.DrawWireCube(transform.position, new Vector3(gridSize.x, gridSize.y, 1)); if (grid == null) return; Gizmos.color = new Color(1, 1, 1, 0.2f); //绘制网格 foreach (var node in grid) { Gizmos.DrawCube(node._worldPos+Vector3.forward, Vector3.one * (nodeDiameter - .1f*nodeDiameter)); } /* //绘制射程区域 Gizmos.color = Color.red; for (int i = zoneLeftDown._gridX; i <= zoneRightUp._gridX; i++) for (int j = zoneLeftDown._gridY; j <= zoneRightUp._gridY; j++) Gizmos.DrawCube(grid[i, j]._worldPos + Vector3.forward, Vector3.one * (nodeDiameter - .1f * nodeDiameter)); //绘制随机点 Gizmos.color = Color.blue; Gizmos.DrawCube(pos + Vector3.forward, Vector3.one * (nodeDiameter - .1f * nodeDiameter)); /* Gizmos.color = Color.red; Gizmos.DrawCube(tar._worldPos + Vector3.forward, Vector3.one * (nodeDiameter - .1f * nodeDiameter)); */ /* //绘制射程区域 Gizmos.color = Color.red; for (int i = 0; i <= 3; i++) for (int j = 1; j <= 6; j++) Gizmos.DrawCube(grid[i, j]._worldPos + Vector3.forward, Vector3.one * (nodeDiameter - .1f * nodeDiameter)); */ } }
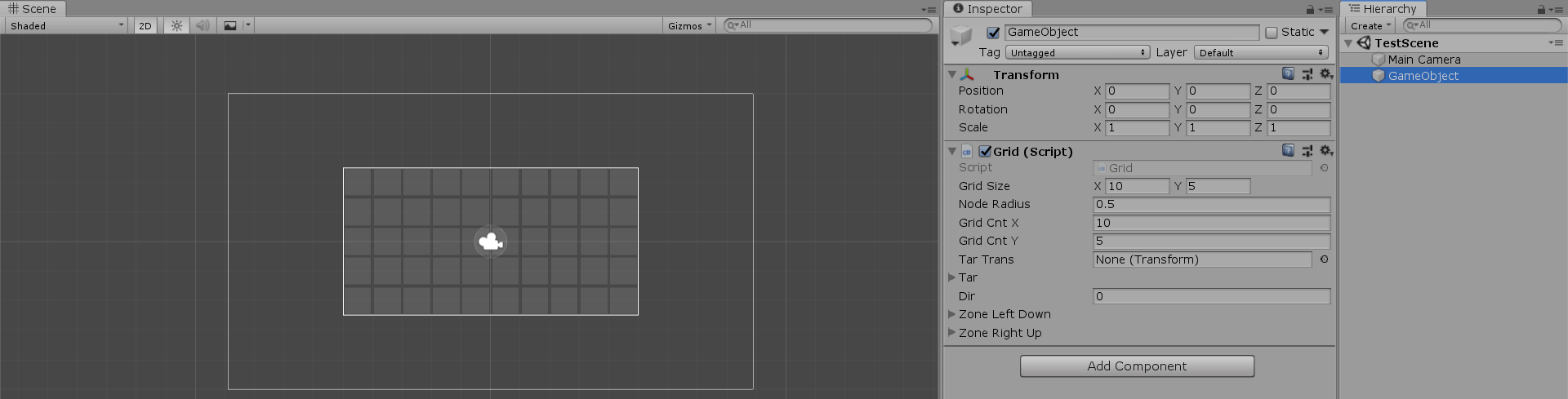
运行结果: