LeGO-LOAM Github 地址:https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
相关依赖安装
1. ROS
2.GTSAM
- 下载gtsam源码
git clone https://bitbucket.org/gtborg/gtsam.git- 编译安装gtsam
mkdir build
cd build
cmake ..
make check (可以省略)
make install下载LeGO-LOAM
cd ~/catkin_ws/src(若没有ROS工作空间,新建一个)
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git编译LeGO-LOAM
cd ~/catkin_ws
catkin_make -j1注意:编译时可能会遇到如下错误
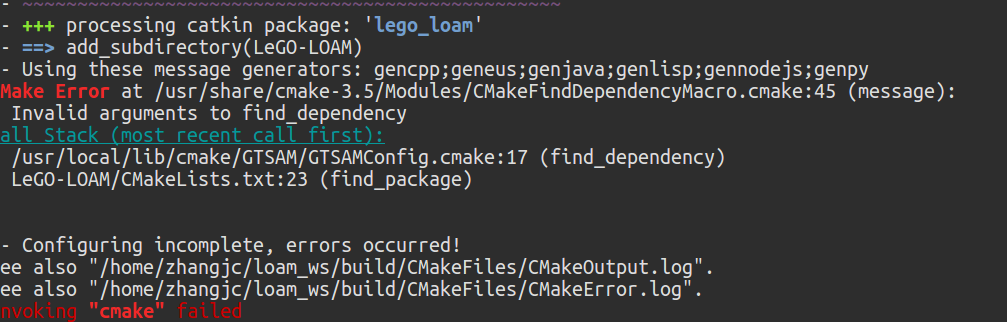
解决方法: 将/usr/local/lib/cmake/GTSAM/GTSAMConfig.cmake:17 行的find_dependency改成find_package
该文件可能没有权限修改,首先修改权限给它写权限
sudo chmod a+w GTSAMConfig.cmake运行LeGO-LOAM
roslaunch lego_loam run.launch打开数据文件
rosbag play *.bag --clock --topic /velodyne_points /imu/data注意:
LeGO-LOAM 以/velodyne_points和/imu/data为topic分别订阅激光雷达和imu数据,也可以没有imu数据
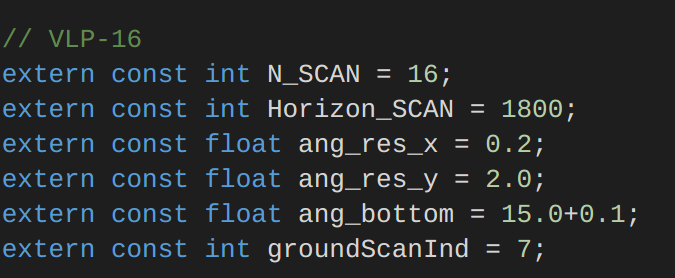
LeGO-LOAM默认的激光雷达数据为VLP-16类型
若使用其他类型激光雷达数据,需要在utility.h中修改如下图所示的激光雷达相关参数
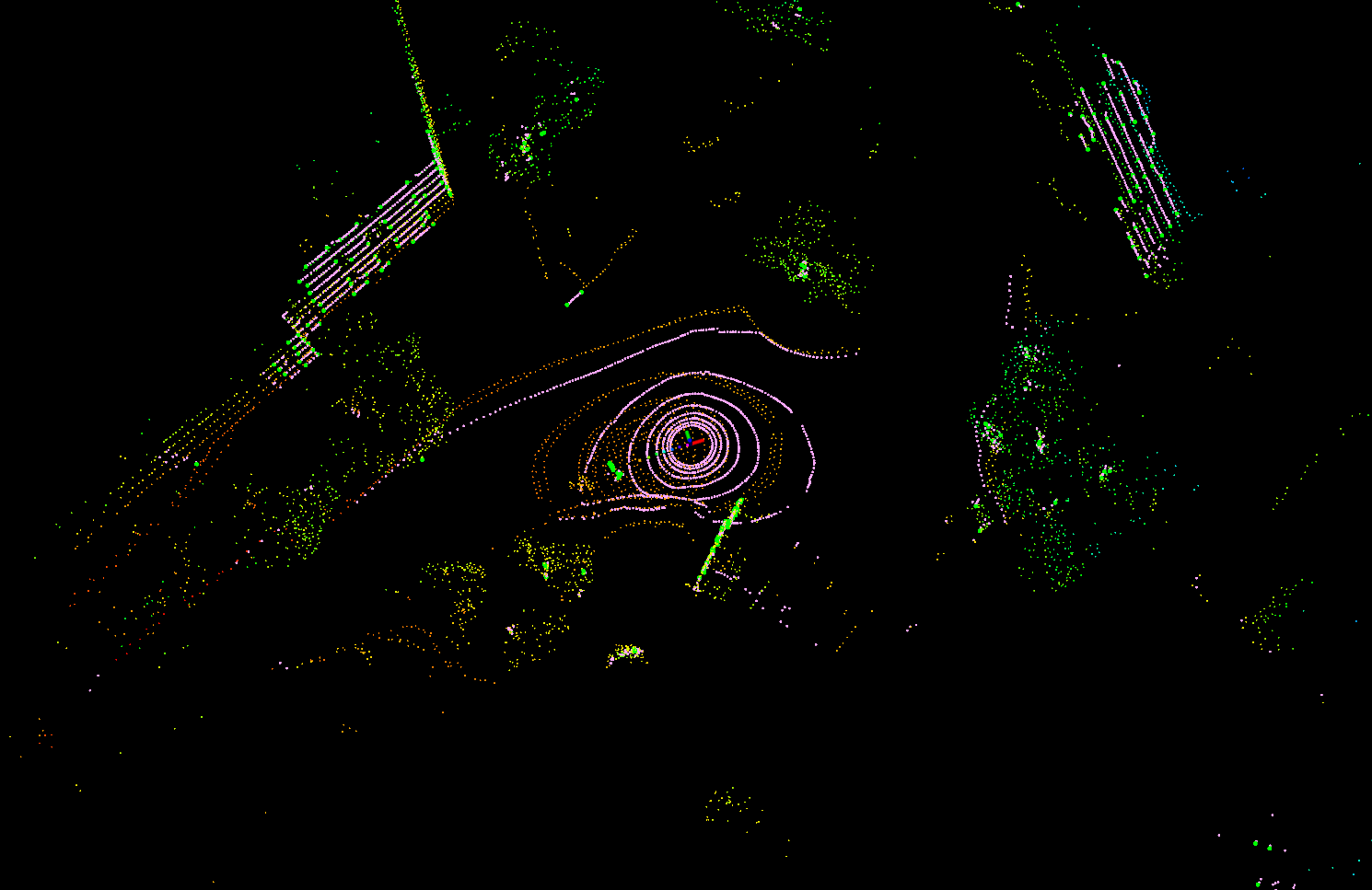
运行结果