试管婴儿赴美生子广州同号█:138★0226★9370█ ████试管婴儿新一代赴美生子█代孕包成功█ ★█代孕包男孩█ ★█泰国代孕
声明:阅读本文需要了解线性代数里面的点乘(图像卷积的原理),高等数学里的二元函数的梯度,极大值定义,了解概率论里的二维高斯分布
1.canny边缘检测原理和简介
2.实现步骤
3.总结
一、 Canny边缘检测算法的发展历史
Canny算子是28岁的John Canny在1986年提出的,该文章发表在PAMI顶级期刊(1986. A computational approach to edge detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 8, 1986, pp. 679-698)。现在老大爷目前(61岁)在加州伯克利做machine learning,主页(http://www.cs.berkeley.edu/~jfc/),大爷就是大爷。
边缘检测是从图像中提取有用的结构信息的一种技术,如果学过信息论就会知道,一面充满花纹的墙要比一面白墙的信息量大很多,没学过也没关系,直观上也能理解:充满花纹的图像要比单色图像信息更丰富。为什么要检测边缘?因为我们需要计算机自动的提取图像的底层(纹理等)或者高层(时间地点人物等)的信息,边缘可以说是最直观、最容易发现的一种信息了。Canny提出了一个对于边缘检测算法的评价标准,包括:
1) 以低的错误率检测边缘,也即意味着需要尽可能准确的捕获图像中尽可能多的边缘。
2) 检测到的边缘应精确定位在真实边缘的中心。
3) 图像中给定的边缘应只被标记一次,并且在可能的情况下,图像的噪声不应产生假的边缘。
简单来说就是,检测算法要做到:边缘要全,位置要准,抵抗噪声的能力要强。
接下来介绍最经典的canny边缘检测算法,很多边缘检测算法都是在此基础上进行改进的,学习它有利于一通百通。
二、实现步骤
step1:高斯平滑滤波
没有哪张图片是没有噪声的。————鲁迅
滤波是为了去除噪声,选用高斯滤波也是因为在众多噪声滤波器中,高斯表现最好(表现怎么定义的?最好好到什么程度?),你也可以试试其他滤波器如均值滤波、中值滤波等等。一个大小为(2k+1)x(2k+1)的高斯滤波器核(核一般都是奇数尺寸的)的生成方程式由下式给出:
 ‘
‘
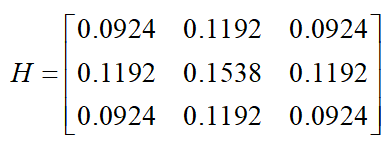
下面是一个sigma = 1.4,尺寸为3x3的高斯卷积核的例子,注意矩阵求和值为1(归一化):
举个例子:若图像中一个3x3的窗口为A,要滤波的像素点为e,则经过高斯滤波之后,像素点e的亮度值为:

其中*为卷积符号,sum表示矩阵中所有元素相加求和,简单说,就是滤波后的每个像素值=其原像素中心值及其相邻像素的加权求和。图像卷积是图像处理中非常重要且广泛使用的操作,一定要理解好。
其中高斯卷积核的大小将影响Canny检测器的性能。尺寸越大,去噪能力越强,因此噪声越少,但图片越模糊,canny检测算法抗噪声能力越强,但模糊的副作用也会导致定位精度不高,一般情况下,推荐尺寸5*5,3*3也行。
step2: 计算梯度强度和方向
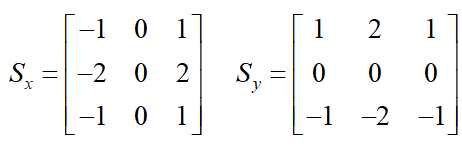
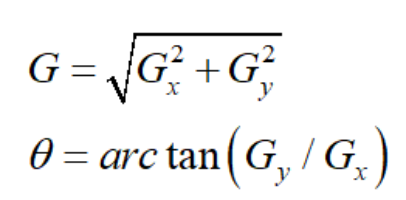
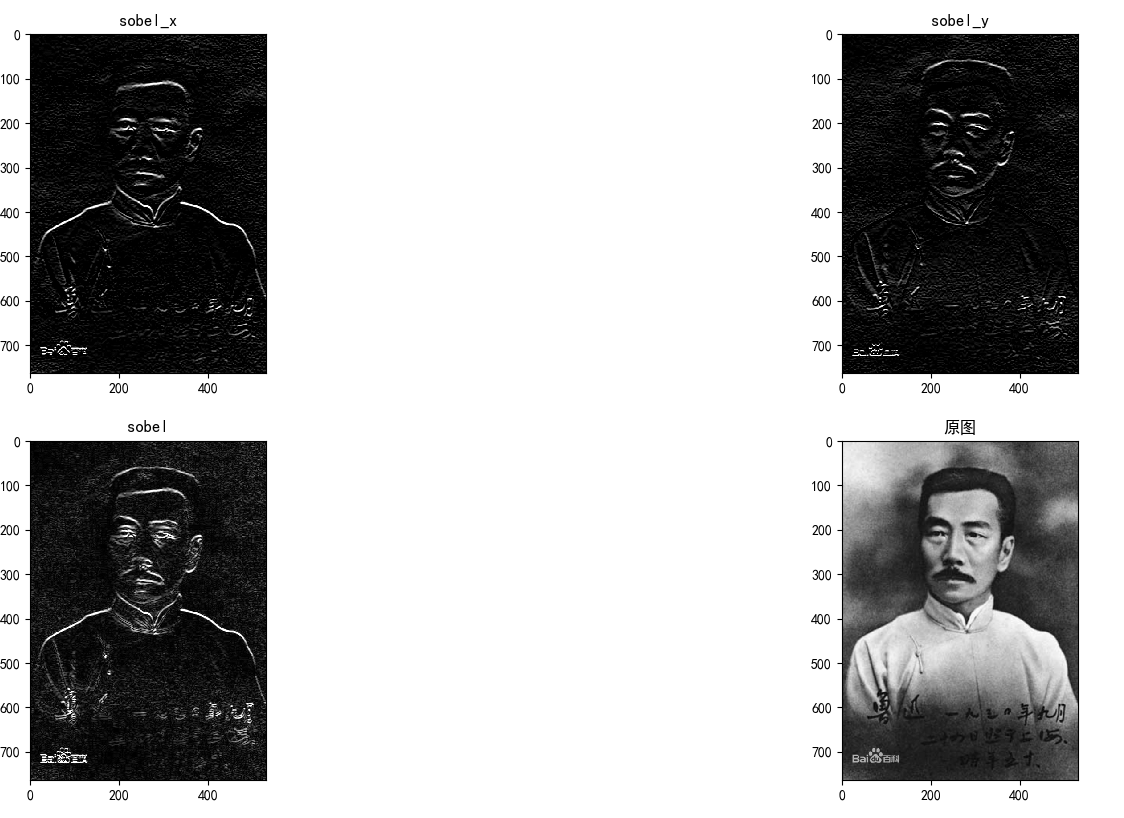
边缘的最重要的特征是灰度值剧烈变化,如果把灰度值看成二元函数值,那么灰度值的变化可以用二元函数的”导数“(或者称为梯度)来描述。由于图像是离散数据,导数可以用差分值来表示,差分在实际工程中就是灰度差,说人话就是两个像素的差值。一个像素点有8邻域,那么分上下左右斜对角,因此Canny算法使用四个算子来检测图像中的水平、垂直和对角边缘。算子是以图像卷积的形式来计算梯度,比如Roberts,Prewitt,Sobel等,这里选用Sobel算子来计算二维图像在x轴和y轴的差分值(这些数字的由来?),将下面两个模板与原图进行卷积,得出x和y轴的差分值图,最后计算该点的梯度G和方向θ
计算梯度的模和方向属于高等数学部分的内容,如果不理解应该补习一下数学基本功,图像处理经常会用到这个概念。
这部分我实现了下,首先了解opencv的二维滤波函数:dst=cv.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
dst: 输出图片
src: 输入图片
ddepth: 输出图片的深度, 详见 combinations,如果填-1,那么就跟与输入图片的格式相同。
kernel: 单通道、浮点精度的卷积核。
以下是默认参数:
anchor:内核的基准点(anchor),其默认值为(-1,-1)表示位于kernel的中心位置。基准点即kernel中与进行处理的像素点重合的点。举个例子就是在上面的step1中,e=H*A得到的e是放在原像素的3*3的哪一个位置,一般来说都是放在中间位置,设置成默认值就好。
delta :在储存目标图像前可选的添加到像素的值,默认值为0。(没用过)
borderType:像素向外逼近的方法,默认值是BORDER_DEFAULT,即对全部边界进行计算。(没用过)
上代码
 View Code
View Code
运行效果:
需要注意一点:在图像处理领域,卷积运算的定义是先将核关于x轴和y轴反转,然在做相关运算。然而工程实践中往往跳过反转,用相关运算代替卷积(比如opencv)。如果你需要严格的卷积运算,应该注意原函数的具体实现方式。sobel算子天生关于中心对称,所以反转与否并不影响结果(我在代码里用cv2.flip()进行了反转操作)。
在之后的实现中,我发现用opencv自带的滤波函数算出来的梯度是归一化到(0-255)的,引入其他的库也很麻烦,因此自己写了个简单的二位卷积函数来实现梯度计算。所以上面的图适合看效果,并不适合在程序中使用,卷积函数的代码如下:
View Code
小技巧:用plt显示二维矩阵,鼠标移到某个像素就会显示坐标(x,y)和灰度值,浮点数也可以显示。这可以很方便的看某个数据(像素点)是否有问题。
梯度和幅值的计算效果如下:
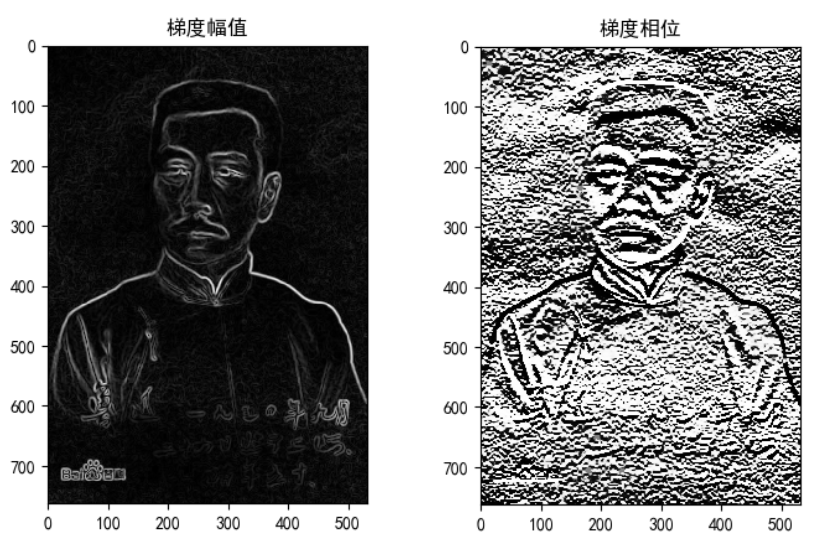
能看出来sobel算子计算的边缘很粗很亮,比较明显,但是不够精确,我们的目标是精确到一个像素宽,至于梯度相位就很难看出什么特征,并且梯度相位实际上是为了下一步打基础的。下面附上代码:
View Code
step3:非极大值抑制
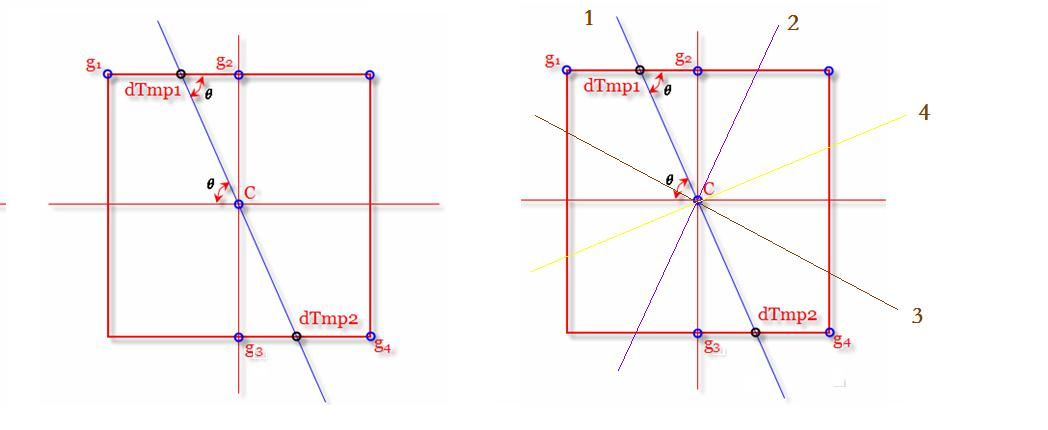
sobel算子检测出来的边缘太粗了,我们需要抑制那些梯度不够大的像素点,只保留最大的梯度,从而达到瘦边的目的。这些梯度不够大的像素点很可能是某一条边缘的过渡点。按照高数上二位函数的极大值的定义,即对点(x0,y0)的某个邻域内所有(x,y)都有f(x,y)≤(f(x0,y0),则称f在(x0,y0)具有一个极大值,极大值为f(x0,y0)。简单方案是判断一个像素点的8邻域与中心像素谁更大,但这很容易筛选出噪声,因此我们需要用梯度和梯度方向来辅助确定。
如下图所示,中心像素C的梯度方向是蓝色直线,那么只需比较中心点C与dTmp1和dTmp2的大小即可。由于这两个点的像素不知道,假设像素变化是连续的,就可以用g1、g2和g3、g4进行线性插值估计。设g1的幅值M(g1),g2的幅值M(g2),则M(dtmp1)=w*M(g2)+(1-w)*M(g1) ,其w=distance(dtmp1,g2)/distance(g1,g2) 。也就是利用g1和g2到dTmp1的距离作为权重,来估计dTmp1的值。w在程序中可以表示为tan(θ)来表示,具体又分为四种情况(下面右图)讨论。
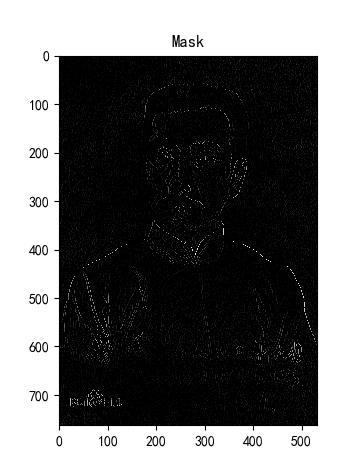
如下图,经过非极大值抑制可以很明显的看出去除了很多点,边缘也变得很细。在程序实现中,要注意opencv的默认坐标系是从左到右为x轴,从上到下是y轴,原点位于左上方,计算g1、g2、g3、g4的位置的时候,一定要小心(坑了我很久)。经过非极大值抑制可以看出来图片的边缘明显变细,很多看起来黑色的部分其实有值的,只是因为值太小了看不清楚,而这些黑色的部分可能是噪声或者其他原因造成的局部极大值,下一步我们就要用双阈值来限定出强边缘和弱边缘,尽可能的减少噪声的检出。代码附上:
View Code
step4:用双阈值算法检测和连接边缘
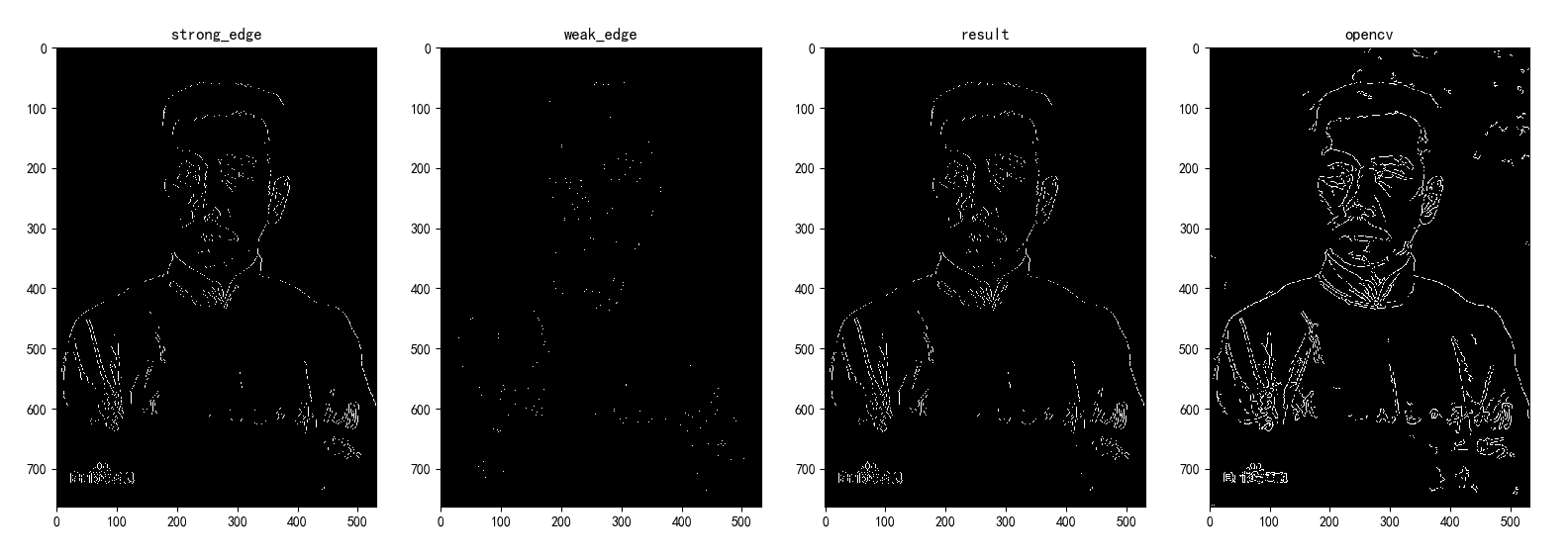
双阈值法非常简单,我们假设两类边缘:经过非极大值抑制之后的边缘点中,梯度值超过T1的称为强边缘,梯度值小于T1大于T2的称为弱边缘,梯度小于T2的不是边缘。可以肯定的是,强边缘必然是边缘点,因此必须将T1设置的足够高,以要求像素点的梯度值足够大(变化足够剧烈),而弱边缘可能是边缘,也可能是噪声,如何判断呢?当弱边缘的周围8邻域有强边缘点存在时,就将该弱边缘点变成强边缘点,以此来实现对强边缘的补充。实际中人们发现T1:T2=2:1的比例效果比较好,其中T1可以人为指定,也可以设计算法来自适应的指定,比如定义梯度直方图的前30%的分界线为T1,我实现的是人为指定阈值。检查8邻域的方法叫边缘滞后跟踪,连接边缘的办法还有区域生长法等等。强边缘、弱边缘、综合效果、和opencv的canny函数对比如下: