ROS 多个工作空间的环境变量问题(source .bashrc配置文件)
造成多个工作空间的环境变量问题,原因大多数是工作空间被覆盖的问题。
多个空间的环境变量问题,解决步骤:
1.进入主目录:cd ~。
2.打开主目录下的.bashrc配置文件:vim .bashrc。
3.把光标移动到文件的末尾处:Shirt+G键。
4.然后会看到很多条以source开头的命令。
5.把它们都屏蔽起来,使用符号“ # ”。
6.把刚才屏蔽起来的source命令,从上到下,一条一条的取消屏蔽。
7.输入roscore,检查是否会错误。(或者使用其他检验命令)
8.如果有错误,则表明,刚刚取消屏蔽的source命令的工作空间目录是有问题。
9.进入上一步骤的source命令的工作空间目录,删除build和devel两个目录。
10.重新编译该工作空间catkin_make。
11.注意一点,在这里,因为上面的一条source命令是与下面的一条source命令直接关联的,所以如果当该条source命令有错,则下面的source命令也应该一起重新编译。
例子:
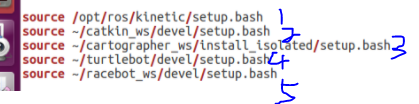
如果第3条source命令有错误,则第3、第4、第五条source命令也应该重新编译。
本人的.bashrc
source /opt/ros/kinetic/setup.bash
source ~/catkin_ws/devel/setup.bash
source ~/turbot3_ws/devel/setup.bash
source ~/racebot_ws/devel/setup.bash
source ~/cartographer_ws/devel_isolated/setup.bash
source ~/qtros_ws/devel/setup.bash
source ~/turtlebot_ws/devel/setup.bash
export PATH=$PATH:$HOME/tools/arduino-1.8.8
export ROS_MASTER_URI=http://localhost:11311
export ROS_HOSTNAME=localhost
#export TURTLEBOT3_MODEL=burger
export TURTLEBOT3_MODEL=waffle
export TURTLEBOT_3D_SENSOR=kinect