版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/Oyj1020/article/details/75929184
由于在Linux下阅读、调试libev源码过于复杂繁琐,需要为vim或emacs做配置一堆配置,才稍微好些,但是操作起来十分困难,花费大量的时间,影响阅读和理解libev的速度。所以使用VisualGDB编译、调试libev。
编译环境
- Visual gdb 5.0
- VS2013
- Ubuntu 16.04 server 虚拟机
安装gcc、g++、gdb、open-ssh - win 7操作系统
编译步骤
- 下载libev到Ubuntu Linux
地址:https://github.com/quartzjer/libev 在Linux下编译libev
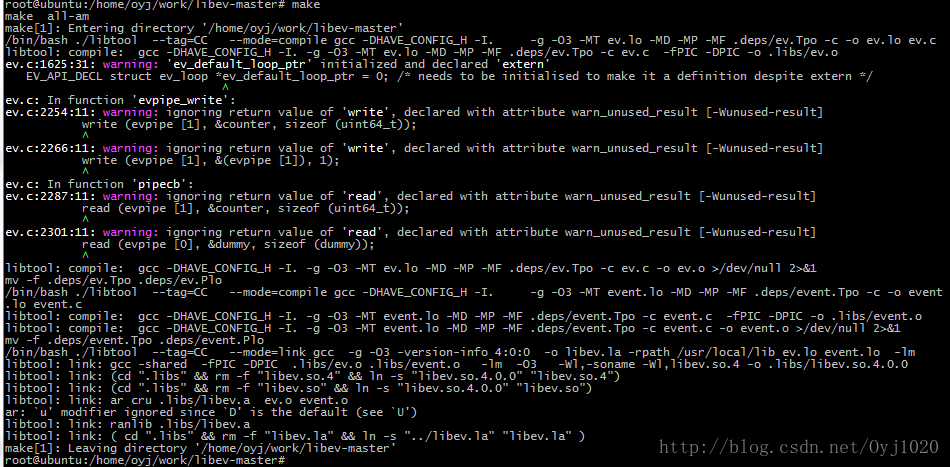
1.执行./configure 命令
2.执行make命令。从编译输出可以看到执行make的时候,只是编译了ev.c、event.c 两个文件
在window中创建Visual gdb项目
参考网址:http://blog.csdn.net/wu936754331/article/details/49305377- 拷贝libev中的文件到Visual gdb项目中
将.c、.h文件拷贝到Visual gdb项目中
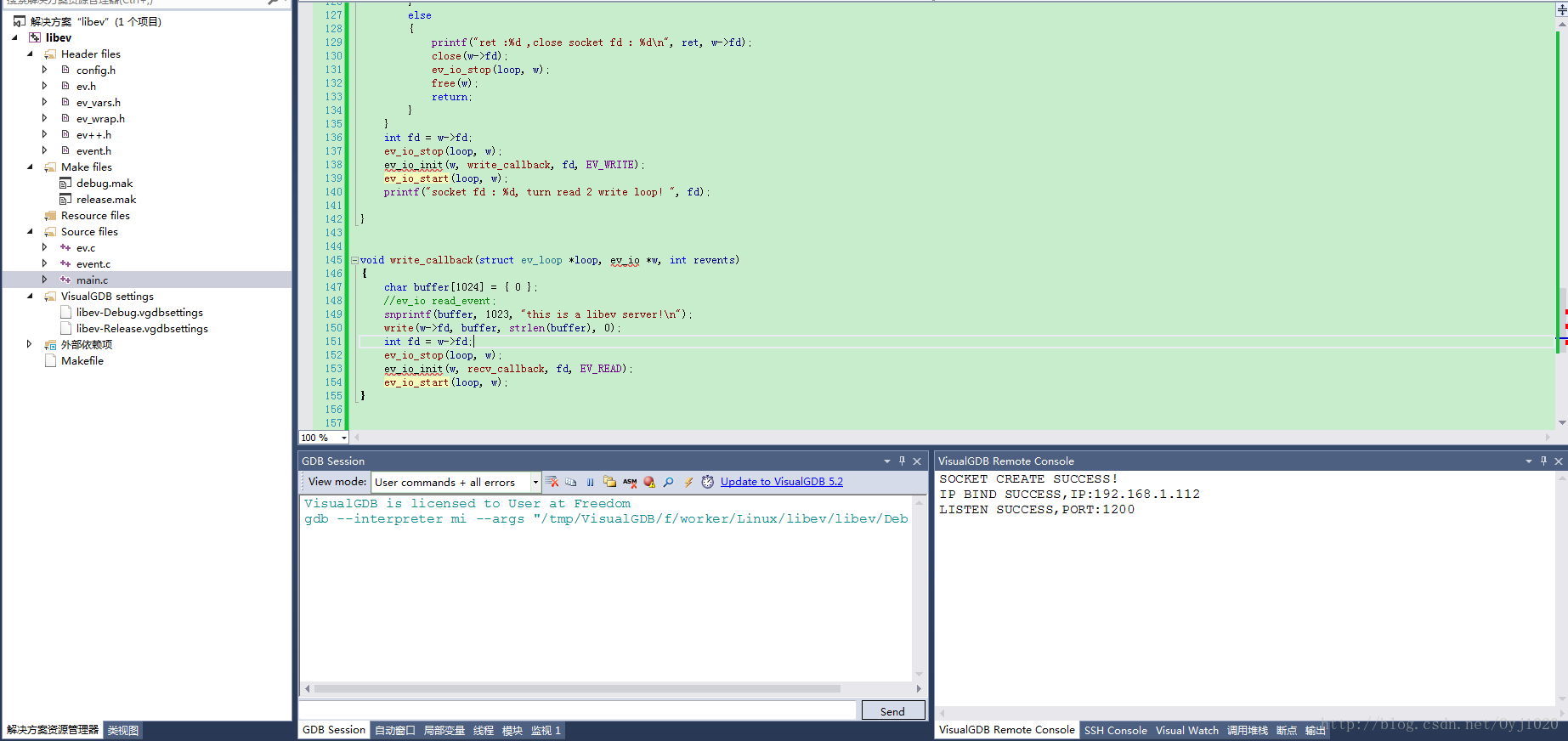
- 添加libev文件并编译运行
只添加ev.c、event.c和头文件,并创建main.c文件,并粘贴一下demo代码,然后编译运行。如果添加了其他的.c文件,编译会报错,因为ev_epoll.c ev_kqueue.c ev_poll.c ev_port.c ev_select.c ev_win32.c这个几个源文件没有.h文件的,它们被ev.c event.c直接include 插入到源码中,若再次添加就会产生编译报错。如果想更好地阅读源码,直接将源码插入到include .c文件处


// a single header file is required
#include <stdio.h> // for puts
#include <stdio.h>
#include <netinet/in.h>
#include <errno.h>
#include "ev.h"
#define MAXLEN 1023
#define PORT 1200
#define ADDR_IP "192.168.1.112"
int socket_init();
void accept_callback(struct ev_loop *loop, ev_io *w, int revents);
void recv_callback(struct ev_loop *loop, ev_io *w, int revents);
void write_callback(struct ev_loop *loop, ev_io *w, int revents);
int main(int argc, char** argv)
{
int listen;
ev_io ev_io_watcher;
listen = socket_init();
struct ev_loop *loop = ev_loop_new(EVBACKEND_EPOLL);
ev_io_init(&ev_io_watcher, accept_callback, listen, EV_READ);
ev_io_start(loop, &ev_io_watcher);
ev_loop(loop, 0);
ev_loop_destroy(loop);
return 0;
}
int socket_init()
{
struct sockaddr_in my_addr;
int listener;
if ((listener = socket(AF_INET, SOCK_STREAM, 0)) == -1)
{
perror("socket");
exit(1);
}
else
{
printf("SOCKET CREATE SUCCESS!\n");
}
//setnonblocking(listener);
int so_reuseaddr = 1;
setsockopt(listener, SOL_SOCKET, SO_REUSEADDR, &so_reuseaddr, sizeof(so_reuseaddr));
bzero(&my_addr, sizeof(my_addr));
my_addr.sin_family = PF_INET;
my_addr.sin_port = htons(PORT);
my_addr.sin_addr.s_addr = inet_addr(ADDR_IP);
if (bind(listener, (struct sockaddr *) &my_addr, sizeof(struct sockaddr)) == -1)
{
perror("bind error!\n");
exit(1);
}
else
{
printf("IP BIND SUCCESS,IP:%s\n", ADDR_IP);
}
if (listen(listener, 1024) == -1)
{
perror("listen error!\n");
exit(1);
}
else
{
printf("LISTEN SUCCESS,PORT:%d\n", PORT);
}
return listener;
}
void accept_callback(struct ev_loop *loop, ev_io *w, int revents)
{
int newfd;
struct sockaddr_in sin;
socklen_t addrlen = sizeof(struct sockaddr);
ev_io* accept_watcher = malloc(sizeof(ev_io));
while ((newfd = accept(w->fd, (struct sockaddr *)&sin, &addrlen)) < 0)
{
if (errno == EAGAIN || errno == EWOULDBLOCK)
{
//these are transient, so don't log anything.
continue;
}
else
{
printf("accept error.[%s]\n", strerror(errno));
break;
}
}
ev_io_init(accept_watcher, recv_callback, newfd, EV_READ);
ev_io_start(loop, accept_watcher);
printf("accept callback : fd :%d\n", accept_watcher->fd);
}
void recv_callback(struct ev_loop *loop, ev_io *w, int revents)
{
char buffer[1024] = { 0 };
int ret = 0;
//ev_io write_event;
loop:
ret = recv(w->fd, buffer, MAXLEN, 0);
if (ret > 0)
{
printf("recv message :%s \n", buffer);
}
else if (ret == 0)
{
printf("remote socket closed!socket fd: %d\n", w->fd);
close(w->fd);
ev_io_stop(loop, w);
free(w);
return;
}
else
{
if (errno == EAGAIN || errno == EWOULDBLOCK)
{
goto loop;
}
else
{
printf("ret :%d ,close socket fd : %d\n", ret, w->fd);
close(w->fd);
ev_io_stop(loop, w);
free(w);
return;
}
}
int fd = w->fd;
ev_io_stop(loop, w);
ev_io_init(w, write_callback, fd, EV_WRITE);
ev_io_start(loop, w);
printf("socket fd : %d, turn read 2 write loop! ", fd);
}
void write_callback(struct ev_loop *loop, ev_io *w, int revents)
{
char buffer[1024] = { 0 };
//ev_io read_event;
snprintf(buffer, 1023, "this is a libev server!\n");
write(w->fd, buffer, strlen(buffer), 0);
int fd = w->fd;
ev_io_stop(loop, w);
ev_io_init(w, recv_callback, fd, EV_READ);
ev_io_start(loop, w);
}