机器人研究一直是我很早以前的梦想,没有想到在深入研究.Net Micro Framework同时能和机器人搭上了联系。
美国iRobot作为一家大型的机器人军工机械厂,其家用机器人吸尘器(电不足时能自动充电的机器人)已经让iRobot公司名满天下。我们研究的机器人就是iRobot公司推出了的新作——一个可以自己编程的机器人移动平台iRobot Create。
由于最近才从微软拿到这个机器人,所以我们第一步就是先要了解这个机器人,然后MF才能作为它的大脑控制该机器人。
让我们先一睹iRobot Create的“芳容”。

iRobot Create 和充电基座(Home Base)

iRobot Create 和BAM蓝牙模块
iRobot Create有六类共31条控制命令,即能控制机器人行走、旋转、播放音乐,也能获知32个内置传感器信息(轮是否抬起、是否是悬崖、前方是否有墙、左右碰撞检测等等)。通过串口和iRobot Create进行通信(默认波特率57600).
//27
号信息包
public UInt16 WallSignal; //
墙反射的无线信号强度 0 - 4095 高字节在前
//28
号信息包
public UInt16 CliffLeftSignal; //
左悬崖信号强度
//29
号信息包
public UInt16 CliffFrontLeftSignal; //
左前悬崖信号强度
//30
号信息包
public UInt16 CliffFrontRightSignal; //
右前悬崖信号强度
//31
号信息包
public UInt16 CliffRightSignal; //
右悬崖信号强度
//32
号信息包
public bool BpsChange; //
波特率发生改变
public bool DI_3; //DI
输入
public bool DI_2;
public bool DI_1;
public bool DI_0;
//33
号信息包
public UInt16 AI; //
模拟入 0 -1023(5V) 高字节在前
//34
号信息包
public bool HomeBase; //
是否到家
public bool InternalCharger; //
是否充电
随便拿出一段代码,你就会发现iRobot Create可获取大量有效的传感器信息(这样的信息包有四十多个)。
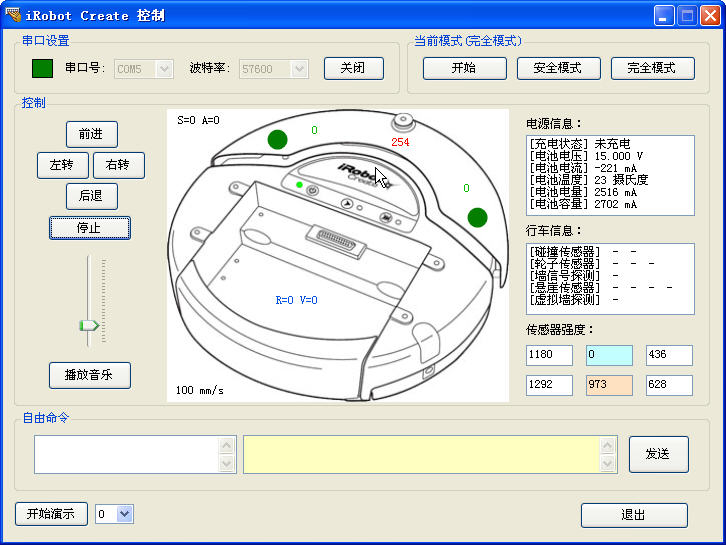
为了便于研究iRobot Create,我先用C#编写一个Windows程序(该程序通信控制部分和MF程序没有太大的区别,仅串口操作有细微差别),通过蓝牙模块(串口)和机器人进行通信(也可以用串口线连接,但是这样控制起来不方便)。
在调试过程中发现蓝牙模块的通信性能和串口线相比,有一定区别,那就是延时较大(一般串口线直连15ms延迟就能保证通信收发成功,蓝牙通信一般需要50ms之上延迟,才能保证通信成功)。控制界面如下。
机器人控制本身就是一个很大的课题,所以我们这里也无法一次说个完整和明白,今后我会陆陆续续发些相关文章的。我们今天先说说iRobot Create该充电时是如何找到“家”的(我想大家一定对这个感兴趣)。
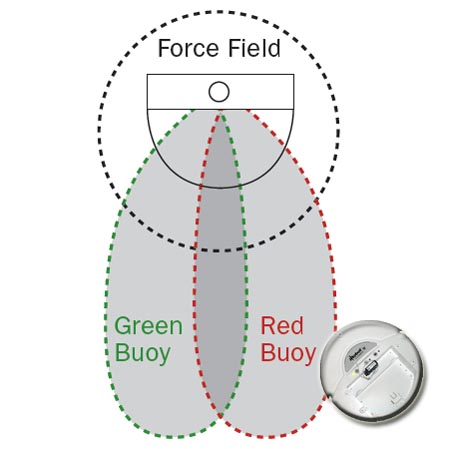
iRobot Create毕竟是一个简单的机器人,所以千万不要和它捉迷藏,Homebase一定要放在室内开阔地带(iRobot Create是通过红外信号发现Homebase的所以中间最好不要有遮挡物,否则iRobot Create有可能要找一阵子)。
Homebase有两个红外发射管,可充当位置标记(一个为Green Buoy,一个为Red Buoy)。在iRobot Create头上有一个全方位红外接收头,可以接收到Homebase发出的红外信息。
可收到的红外指令如下:
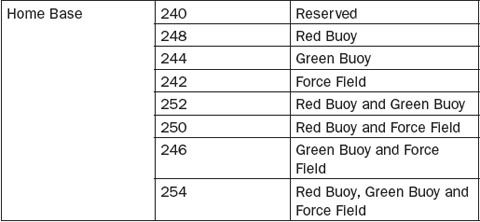
iRobot Create就是根据以上信息,不断地调整自己的方位,找到回家的路。
再分享一下我老师大神的人工智能教程吧。零基础!通俗易懂!风趣幽默!还带黄段子!希望你也加入到我们人工智能的队伍中来!https://blog.csdn.net/jiangjunshow