在无约束优化中,设
f(x)是凸函数。可以通过
∂f(x)=0求解,如果不能直接得到解析解,可以通过构造一个序列,
x0,x1,...,xk,使得
f(x0)>f(x1)>...>f(xk),给定一个阈值
η,当
▽f(x)<η停止。
x:=x+tΔx
(
f是凸函数,满足
f(y)≥f(x)+▽f(x)TΔx)
于是就有了
一般下降方法General Descent Method:
给定一个初始值x,
重复以下步骤:
- 确定下降方向
Δx
- 确定步长
t(1.Exact line search, 2.Backtracking line search)
- 更新
x,
x=x+tΔx
直到满足停止条件
梯度下降法,就是
Δx=−▽f(x),停止准则是
∣∣▽f(x)∣∣2≤η
下面介绍最陡下降法Steepest descent method
f(x)的一阶展开式为
f(x+v)≈f(x)+▽f(x)Tv,选择一个方向
v使
f(x+v)最小,这个方向就是最陡下降法的方向。
v大小要有一个限制,才有意义。
Δxnsd=argmin{▽f(x)Tv∣∣∣v∣∣≤1}
Δxsd=∣∣▽f(x)∣∣∗Δxnsd,这是最陡下降法的方向
根据范数的不同有几个不同的方向。
欧几里得范数Euclidean norm
方向就是
Δxsd=−▽f(x)
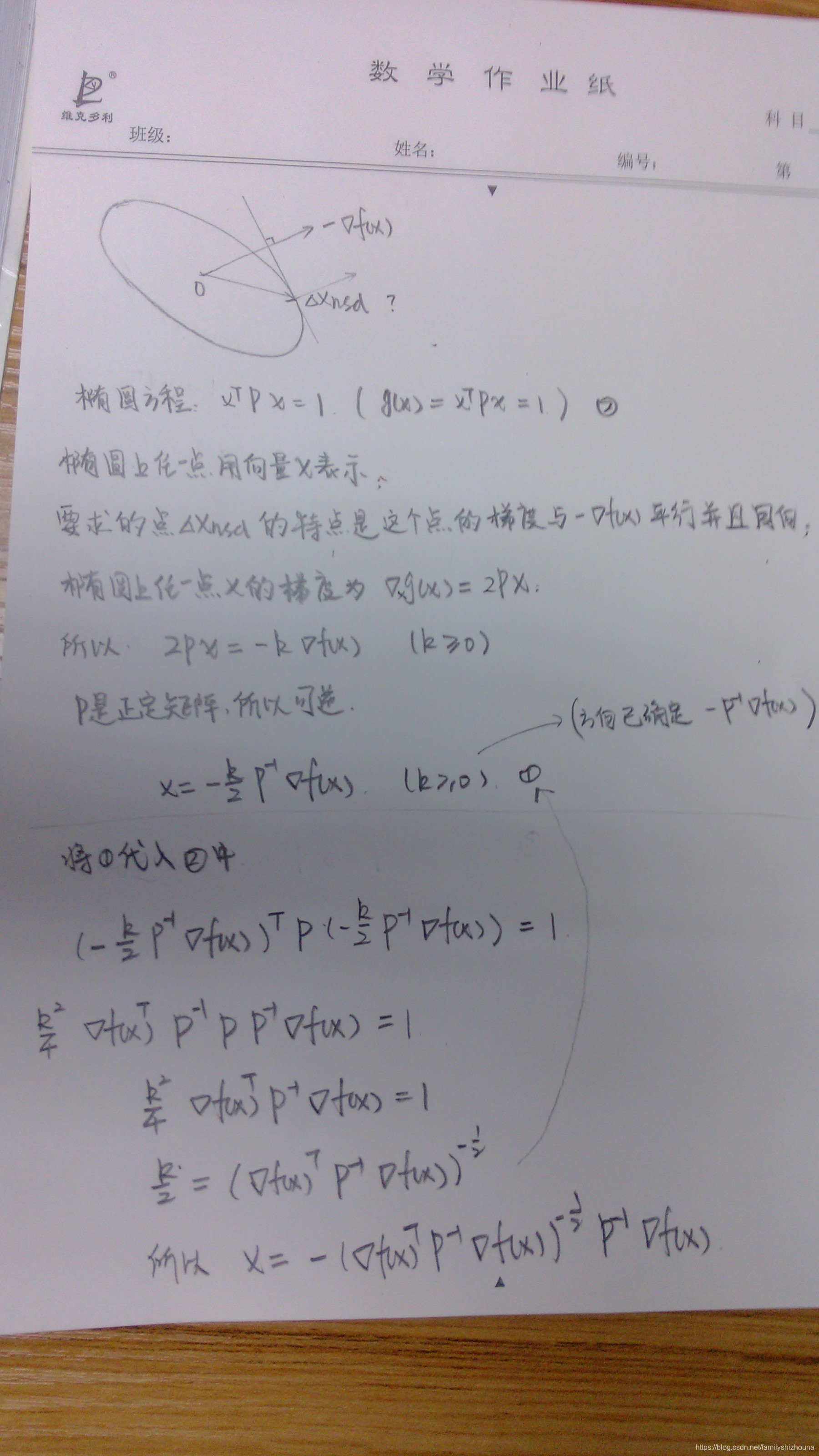
二次范数quadratic norm
方向就是
Δxsd=−P−1▽f(x),下面的图是具体怎么求这个方向的过程。
l-1范数
Δxsd=−∂xi∂f(x)ei,方向是求偏导数的那个方向。
牛顿方法就是二次范数中
P=▽2f(x),Hessian矩阵。当然也可以用泰勒二阶展开式近似,然后求倒求展开式的最小值,也可得到相同的结果。停止准则为
∣∣▽f(x)∣∣▽2f(x)≤η
latex公式大全