隐马尔科夫模型的简单介绍:
五个元组:
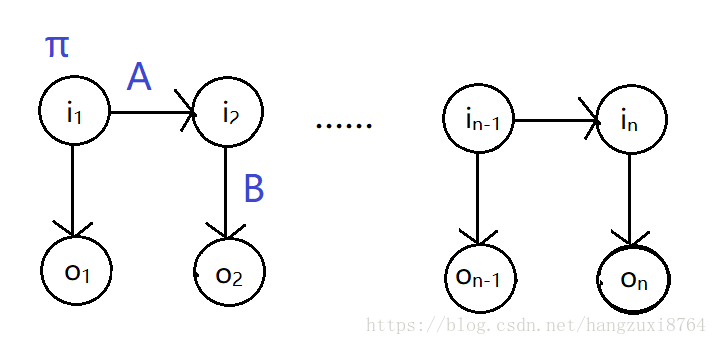
1、初始化π
2、状态转移矩阵 A N*N (N为所有可能的状态q数)
3、观测概率分布 B N*M(M为所有可能的观测值)
4、观测值序列 O {o1,o2……oT}
5、状态值序列 I {i1,i2……iT}
以中文分词为例
状态值的取值有四个{B,E,M,S}
B: begin 起始词
E:end 结尾词
M: middle 中间词
S:siggle 单个词
观测值则为要分词的句子,例:你和你那些本不属于这里的行李
其中的参数集合为λ=(A,B,π)
状态转移矩阵A:aij=P(it+1=qj | it=qi) 是在时刻t处于状态qi的条件下,时刻t+1转移到状态qj的概率。如第一个词的状态值是B,第二个词的状态分别为B,E,M,S的概率就是(a00,a01,a02,a03)。
观测概率矩阵B:bik=P(ot=vk | it=qi) 是在时刻t出去状态qi的条件下生成观测vk的概率。
π是初始状态概率:πi 是第一时刻状态qi的概率。
HMM的三个基本问题:
1、概率计算问题
已知模型λ=(A,B,π)和观测序列 O {o1,o2……oT},计算在模型λ下观测序列出现的概率P(O|λ)。
2.学习问题:
已知观测序列 O {o1,o2……oT},求可以使观测序列P(O|λ)最大的λ=(A,B,π)参数。
3.预测问题:
已知模型λ=(A,B,π)和观测序列 O {o1,o2……oT},求给定观测序列条件概率P(I|O,λ)最大的序列I。
在有监督的分词中,我们要解决的是问题一(前向概率-后向概率)和问题三(Vertibi),
1.前向概率:
给定参数λ,定义 到时刻t的观测序列为o1,o2……ot 且状态为qi的概率为前向概率。
(给定参数λ,求1~t时刻的观测序列为o1,o2……ot ,同时t时刻状态为i的概率)
αt(i)=P(o1,o2…… ot,it=qi|λ)
由此可得,αT(i)=P(o1,o2…… oT,iT=qi|λ)
T时刻状态的可能性有N种,把每种状态下的前向概率加和,就可以得到
P(O|λ)=Σiαt(i)
初值:α1(i)=P(o1,i1=qi|λ)
其实就是第一时刻,状态值为i的概率πi(因为是初始时刻)观测值为o1的概率:πibio1
递推:αt+1(i)={Σ αt(j)αji}biot+1
后向概率:
给定λ,定义到时刻t状态为qi的前提下,从t+1到T的观测序列为ot+1,ot+2……oT的概率为后向概率。
βt(i)=P(ot+1,ot+2…… oT | it=qi , λ )
有此可得,αT(i)=P(o1,o2…… oT,iT=qi|λ)
(公式之后还会补充的……)
简单的原理已经介绍完了,下面开始代码部分
1,用分好词的训练模型计算参数λ
#读取训练文本
f = file(".\\pku_training.utf8")
data = f.read()[3:].decode('utf-8')
f.close()
tokens = data.split(' ')
#len(data)=4065424 #文章长度
#len(tokens)=1109948 #分词长度
#对参数进行初始化 初始化状态 π,状态转移矩阵A,观测概率矩阵B
pi = [0] * 4 # 隐含状态有四个取值{B:0,M:1,E:2,S:3}
a = [[0] * 4 for x in range(4)] # a[i][j]:从i状态转移到j状态的概率
b = [[0]* 65536 for x in range(4)] # b[i][o]:从i状态到o观测值的概率
# 开始训练
last_q = 2 #初始化第一个词的状态是从E(2)开始转移
for k, token in enumerate(tokens):
#对token进行洗涤
token = token.strip()
n = len(token)
if n <= 0:
continue
#如果词的长度为1,则它的状态是S:3
if n == 1:
pi[3] += 1
a[last_q][3] += 1 # 从last_q状态转移到S的数量+1
b[3][ord(token[0])] += 1 #ord()函数是对token[0]字符取unicode数值
#状态为S 观测值为token的数量+1
#如果n>1,则这个token包含一个B,E,如果还有多余词则包含n-2个M
#状态B+1,状态E+1,如果n>2,则状态M+n-2
pi[0] += 1
pi[2] += 1
pi[1] += (n-2)
# 状态转移矩阵
a[last_q][0] += 1
last_q = 2
#n==2,意味着这个token的状态是BE,则a[0][2]+1
if n == 2:
a[0][2] += 1
#n>2,意味着这个token的状态是BMME,其中的M数是n-2
else:
a[0][1] += 1
a[1][1] += (n-3)
a[1][2] += 1
# 发射矩阵
b[0][ord(token[0])] += 1 #状态是B,观测值是token[0]的数量+1
b[2][ord(token[n-1])] += 1 #状态是E,观测值token[n-1]的数量+1
for i in range(1, n-1): #状态是M,观测值token[i]的数量分别都+1
b[1][ord(token[i])] += 1
# 对概率取log值
log_normalize(pi)
for i in range(4):
log_normalize(a[i])
log_normalize(b[i])
return
由此我们能看出,初始化状态概率π是各状态值在的出现概率,即πi=p(i)