跟踪中使用的特征
- 视觉特征最理想的特性是其独特性,因此可以在特征空间中轻松区分对象。
- 许多跟踪算法都使用特征组合
- 颜色:用作基于直方图的外观表示的功能
- 通常使用不同的颜色空间,例如RGB,然而,RGB空间不是感知上均匀的颜色空间,即,RGB空间中的颜色之间的差异不对应于人类感知的颜色差异。
颜色空间
所以很多其他的颜色空间被提出来:

Nrgb是归一化的RGB,他对光线的变化不敏感。

HSI将颜色信息和强度信息分开了,颜色信息由色调和饱和度值表示,而强度由光量决定。HSI也有几个变形:HSL、HSV、HSB等。
CIE解决了RGB感知上不是均匀的问题:


LUV&Lab都是视觉上均匀的颜色空间,但是他们对噪声很敏感。
参考文献:Reference: H.D. Cheng et al. “Color image segmentation: advances and prospects”, Pattern Recognition 34 (2001) 2259-2281.

边
边界对光线是不敏感的,基于轮廓的表征下,物体的边界经常用作特征
Optical Flow
光流法,也就是图像运动的估计,经常用来做运动物体的分割与跟踪

Texture纹理
纹理:纹理是表面强度变化的量度,其量化诸如平滑度和规则性之类的属性,纹理对光线变化不敏感。
目标跟踪方法
点跟踪
从连续帧的检测到的对象是由点来表示的,这些点的集合基于之前的对象状态,其可包括对象的位置和动作。
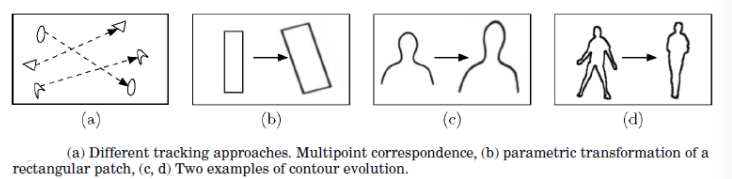
- 基于特征点的跟踪可以用比较不同帧中检测到的物体点的对应关系来表示;
- 点对应很复杂,特别是在存在遮挡,误检,条目和对象消失的情况下;
- 点对应的确定性Deterministic methods方法通过使用一组运动约束,来定义将帧t-1中的每个对象与帧t中的单个对象相关联的损失。
- 对应的损失一般用一下可以方面假设:
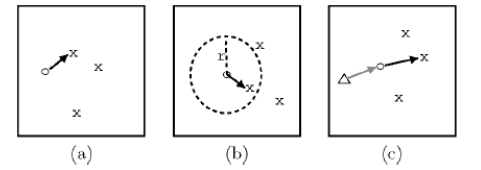
1、邻近:假定物体的位置不会从一帧到另一帧显着变化(见(a))。
2、最大运动速度:定义了物体速度的上限(见(b))。
3、小的速度变化:假定物体的方向和速度没有大的变化(见c)