阅读工具:source insight
技术交流:[email protected] ,[email protected]
源码版本:Firmware(原生固件)
如有需求可以索要word版
这篇博客彻底解决了我无法切换模式的问题,但是还存在几个问题
- 目前还是没有看到定点效果,有可能是磁场干扰(我实验室有几个磁悬浮装置。。。)
也有可能是需要启动LPE
- 没有发现光流与GPS数据融合,据说光流在此函数中是辅助GPS的,可有可无,但是我看程序的光流和GSP数据是独立提供的(希望大神指点)
分析问题的思路(我一直认为思路很重要)
目的:我希望实现光流定点效果
问题:无法切换posctl飞行状态(可能是程序问题,也可能是光流数据问题)
思路:位置估计函数最终一组数据给位置控制,已知GPS可以实现定点,可以认为位置控制部分是对的,也就是说控制算法不用管只需要检查光流部分是否正确。 那么我只需要找到哪些数据可以由光流传感器提供,并检查其数值是否正确。
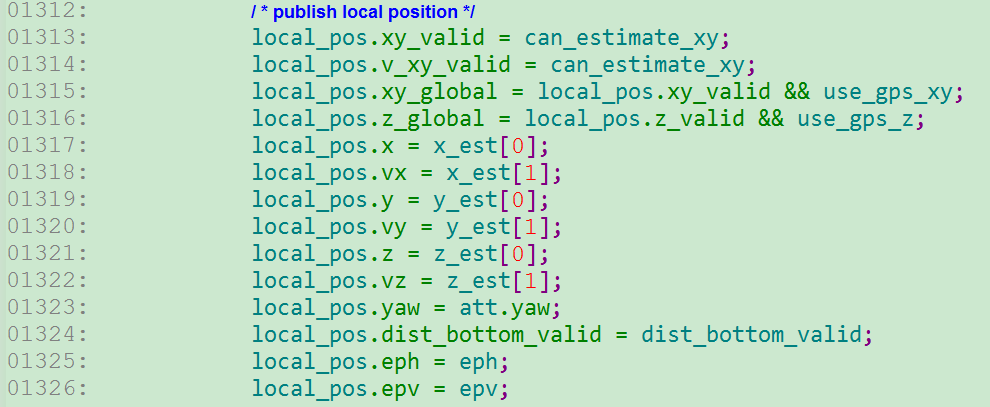
这是位置估计最后产生的值,我们倒过来往前找,can_estimate_xy
bool can_estimate_xy = (eph < max_eph_epv) || use_gps_xy || use_flow || use_vision_xy || use_mocap;可以看到can_estimate_xy是与use_flow光流有关的
接下来两个与GPS有关跳过,看x_est, y_est,z_set
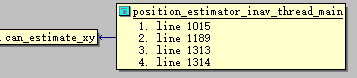
Lidar与flow提供了accel_bias_corr[3]数组的3个数
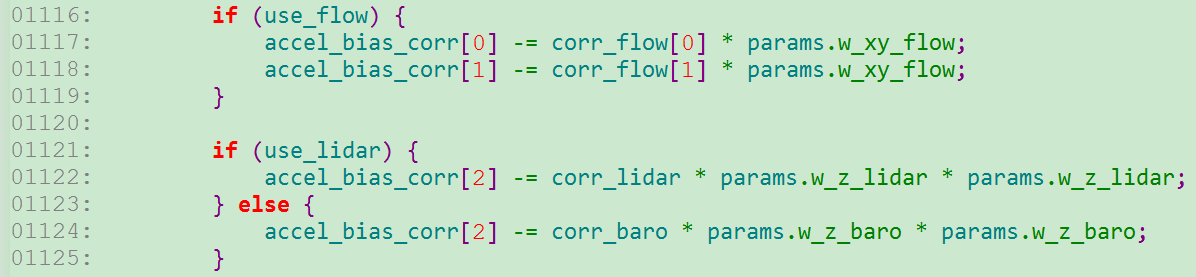
accel_bias_corr[3]数组的3个数传递给了acc_bias[3];
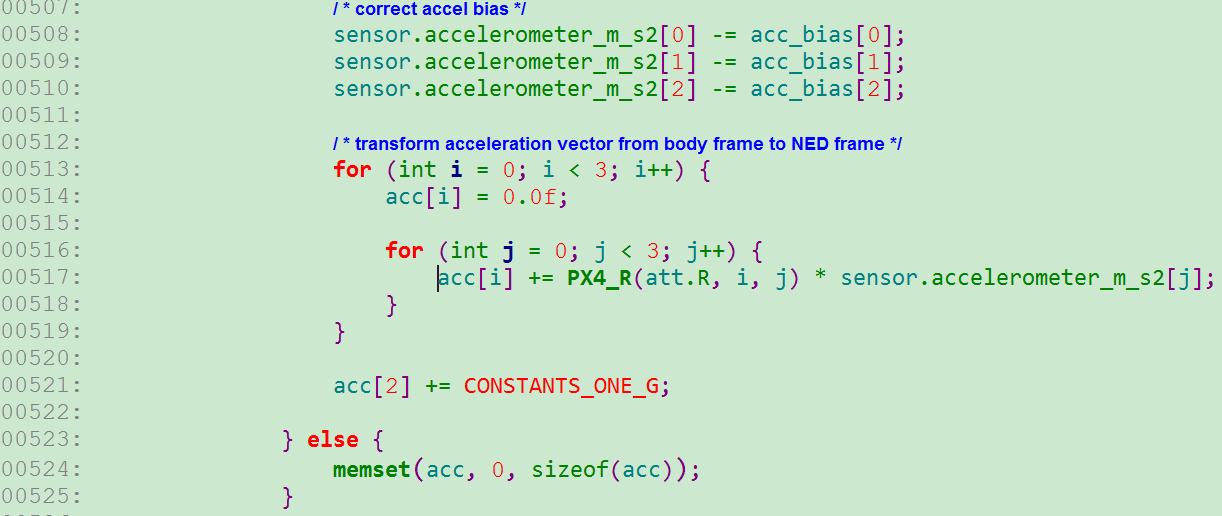
acc_bias[3]最终传递给 acc[3];


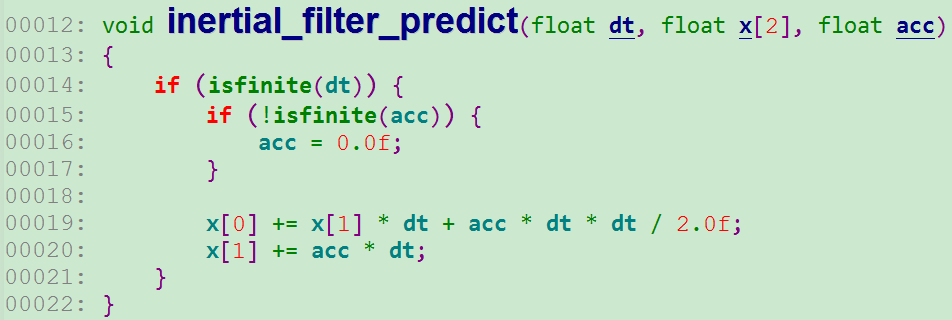
这写着惯性预测滤波,第一次给定了x_set[2], y_set[2], z_set[2]数组的值,Z轴的值是lidar提供,光流只提供水平值

预测结束,马上就进行了第二次滤波,当输入是0时z_set[0],z_set[1]都被赋值,lidar提供这两个数据
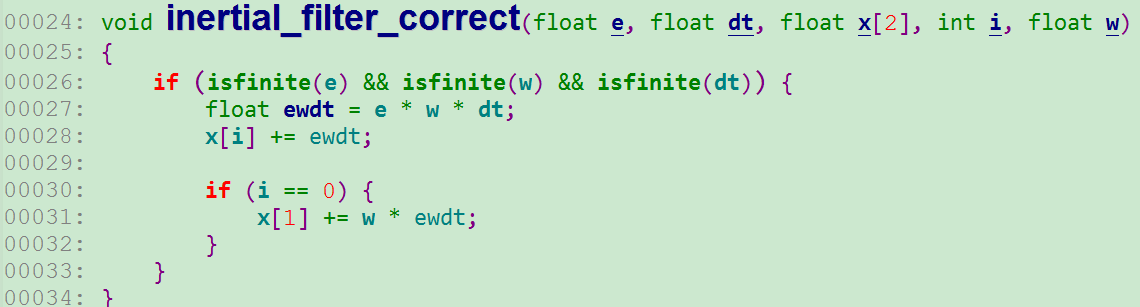

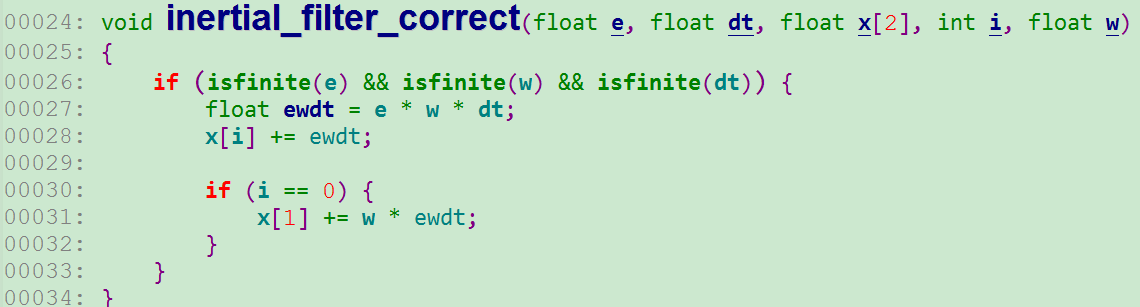
当输入时1时,这个函数只给x_est[1], y_est[1]赋值,所以光流第2次滤波只改修改了这两个值。
综上所述,光流加上雷达提供了x_est[2], y_est[2], z_est[2],所有数据,但是为什么有这么多滤波,暂时不知道。
att.yaw,其实就是vehicle_attitude_s.yaw

通过订阅来的,那么是谁发布的呢?
Attitude_estimator_q_main.cpp (firmware\src\modules\attitude_estimator_q):
orb_publish_auto
(ORB_ID(vehicle_attitude), &_att_pub, &att, &att_inst,ORB_PRIO_HIGH);
姿态估计发布的(找topic的发布者好难,有谁有简单的方法教我一下吧)
dist_bottom_valid, lidar提供

eph(水平定位精度),epv(垂直定位精度)常数

到这所有数据就分析完了 总结一下,光流能提供所有水平有关的值,lidar提供垂直方向的值,为什么要分析lidar?
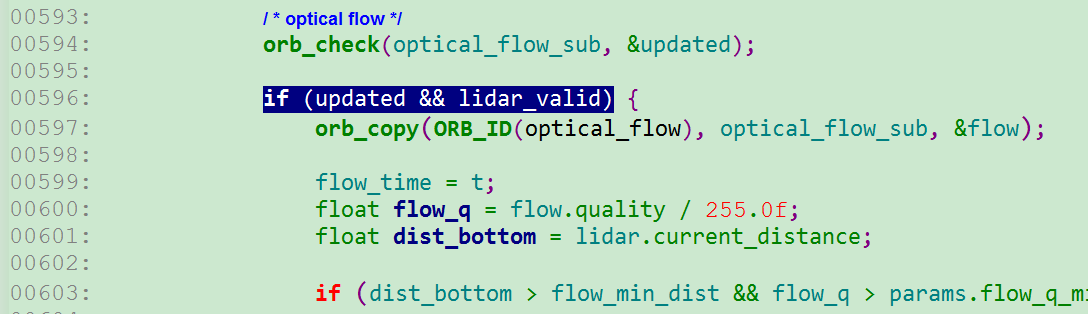
看见没 想用光流 第一个条件就是lidar是否有效,在位置估计里雷达就是距离传感器,对应的实际就是超声波传感器,(实测lidar的数据都是超声波提供的)

所以启用光流的核心问题就是如何启动lidar_valid
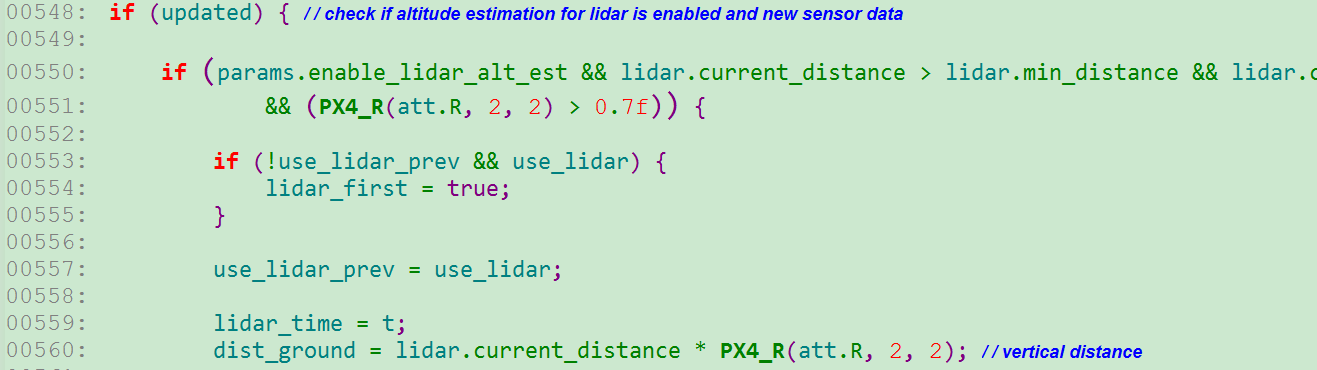
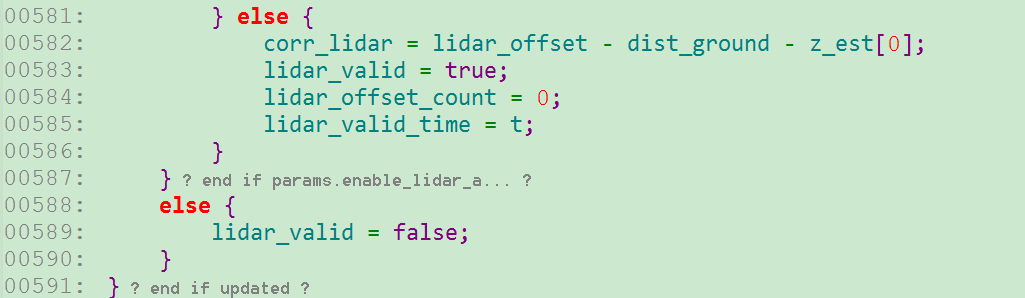
可以看出lidar_valid与3个数据有关params.enable_lidar_alt_est,
lidar.current_distance > lidar.min_distance,lidar.current_distance < lidar.max_distance
其实我们已知光流是有读数,那么后两个判读肯定是能成立的(当前高度大于30cm,小于5m)
主要就是params.enable_lidar_alt_est(为了保险我在程序里加上标志位进行了判读,确实就是第一个条件一直不成立)

找到这个赋值函数,注意这个函数是把h的值给P,(不是把p给h)!!!!!!

在
在函数里找到了,想到这种设置应该在地面站也有,于是去QGC找果然
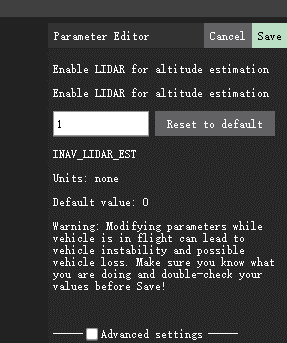

在这里改应该也是一样的,亲测现在可以自由切换到Posctl(定点模式了)虽然还是不能实现定点功能,但是解决了第一个问题还是很开心。
http://blog.csdn.net/czyv587/article/details/51922787 结合使用
最新的源码 这些参数好像不见了(2017/1/6)