分享一下我老师大神的人工智能教程!零基础,通俗易懂!http://blog.csdn.net/jiangjunshow
也欢迎大家转载本篇文章。分享知识,造福人民,实现我们中华民族伟大复兴!
本文来自《自己动手写cpu》一书的总结。原来自己看过原作者的《步步惊芯--软核处理器分析》以及其他关于or1200的书。本次粗略浏览了该书,就某些感兴趣的部分详细分析,并总结成此文。
关于5级流水的架构,可以自己去参考《计算机接口》一书。本文重点不在此。
1、如何从rom里面取地址
简化版的最基本的sopc的框图如下:

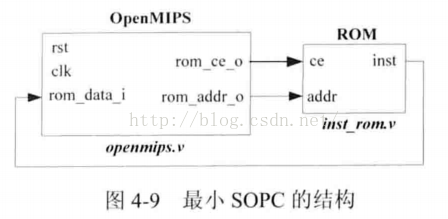
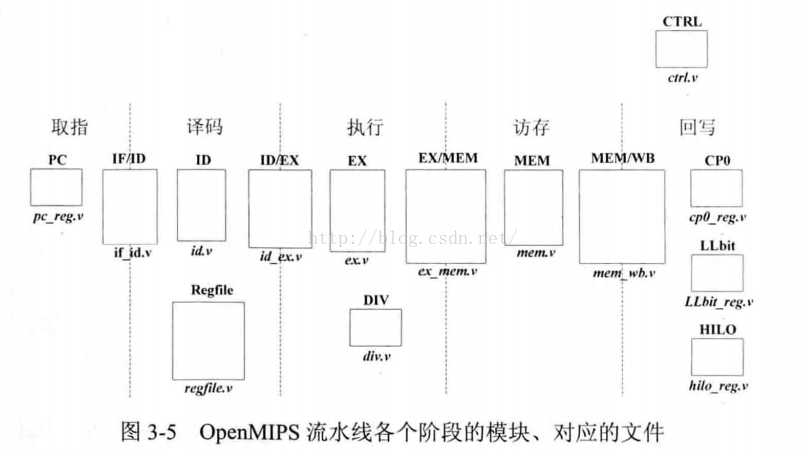
module openmips( input wire clk, input wire rst, input wire[`RegBus] rom_data_i, output wire[`RegBus] rom_addr_o, output wire rom_ce_o );always @ (posedge clk) begin if (ce == `ChipDisable) begin pc <= 32'h00000000; end else begin pc <= pc + 4'h4; end end always @ (posedge clk) begin if (rst == `RstEnable) begin ce <= `ChipDisable; end else begin ce <= `ChipEnable; end end input wire[`InstAddrBus] if_pc, input wire[`InstBus] if_inst, output reg[`InstAddrBus] id_pc, output reg[`InstBus] id_inst always @ (posedge clk) begin if (rst == `RstEnable) begin id_pc <= `ZeroWord; id_inst <= `ZeroWord; end else begin id_pc <= if_pc; id_inst <= if_inst; end end可以看到以上3个代码段,第一段是openmips中的,表示怎么连接含有指令的rom,第二段是pc_reg.v中的,pc是自加的,然后一直是可以对rom取址的,第3段是if_id.v中的,可以看到取址后传递给了译码模块。这就是最基本的程序跑起来的开始。
后面作者自己收东西写指令码实现了与寄存器s0的操作,按照$readmemh的要求写成inst_rom.data。inst_rom.v中读入了该文件。可以参考$readmemh的语法。

2、协处理器的概念:












比如说这里的定时器中断时间就应该很有用。
3、异常相关指令的实现



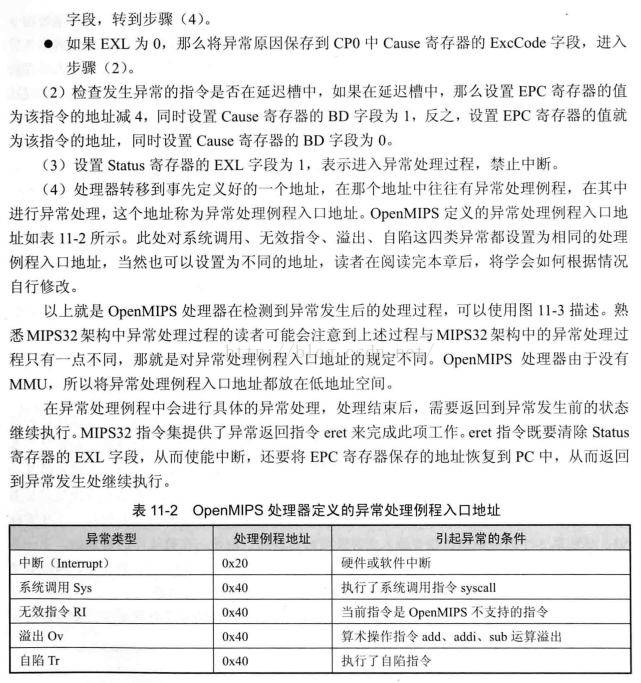
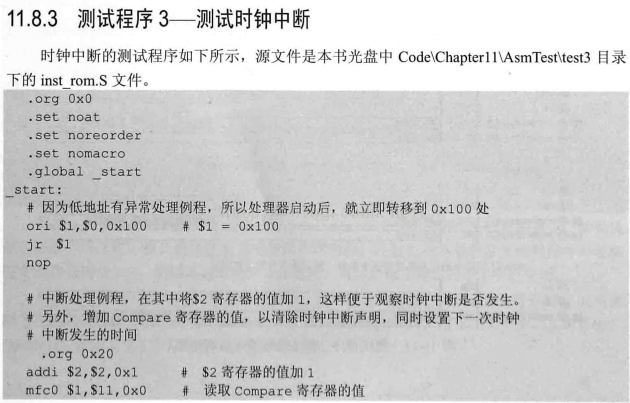
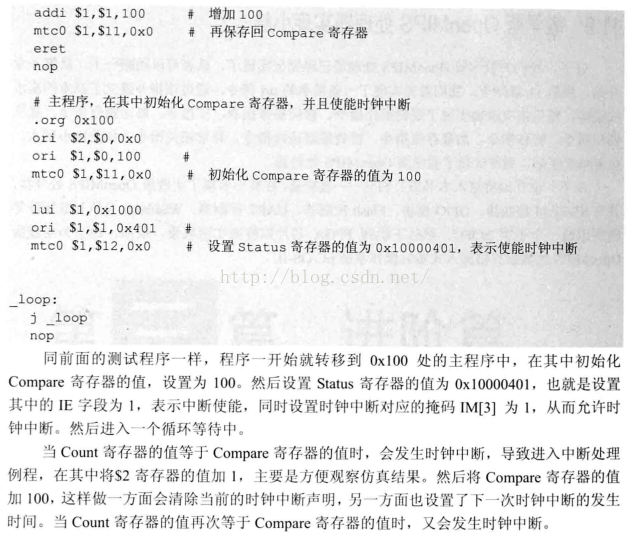
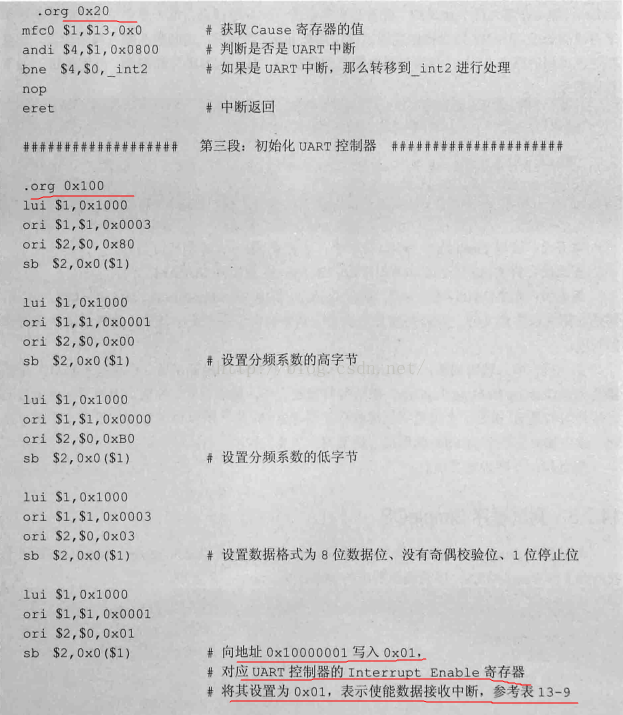
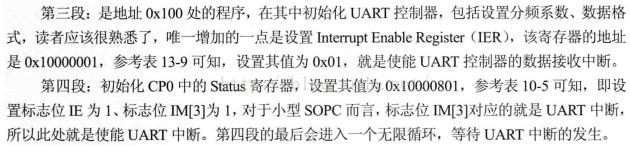
这里的定时器中断设置,是自己去写的汇编代码,然后验证指令正确。实际上我们一般是用c语言去写程序,编译器生成汇编代码和机器码。所以这些异常指令实际上应该是编译器去生产的,异常程序入口地址也不是我们操心的。但是这里我们只能自己写了。
4、wishbone总线:
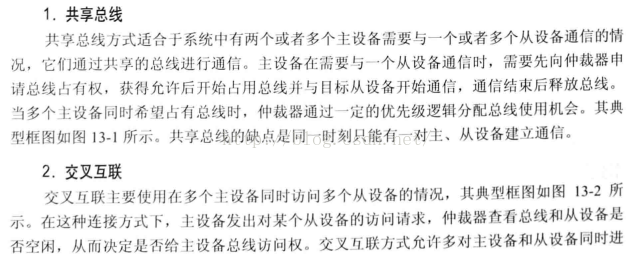

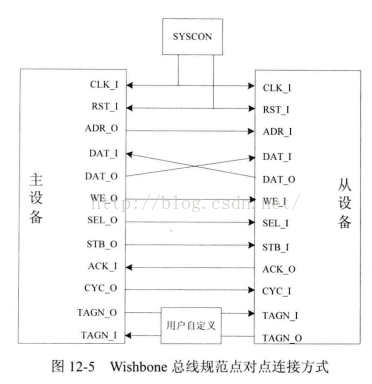
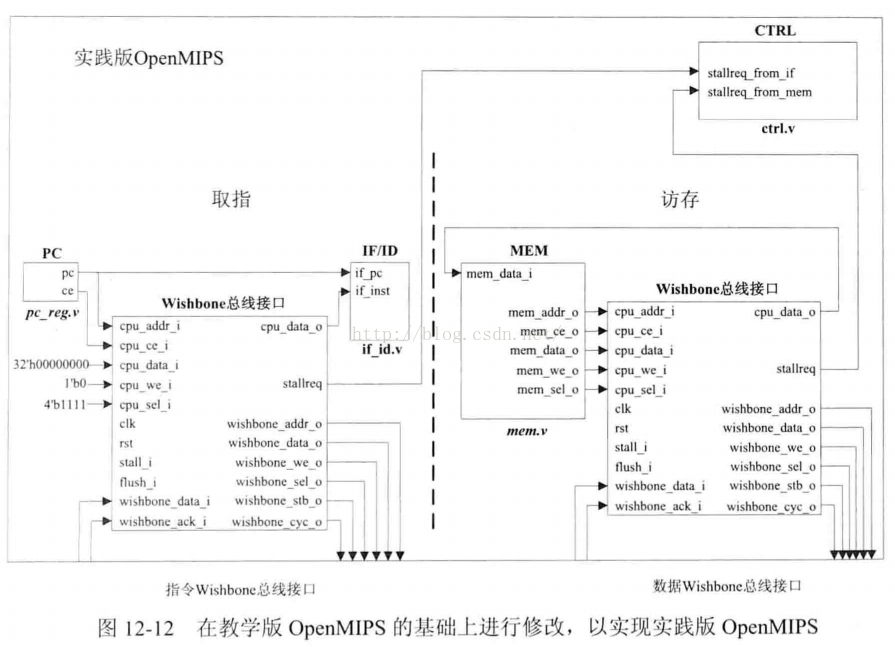
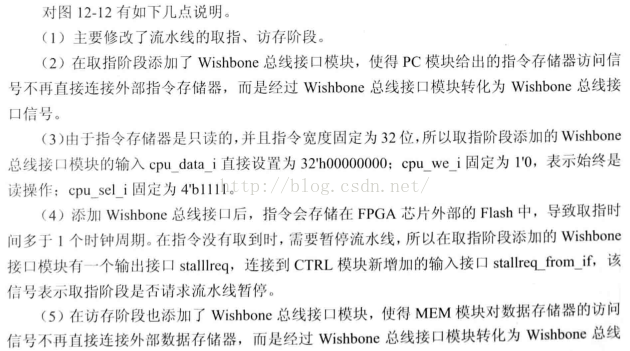
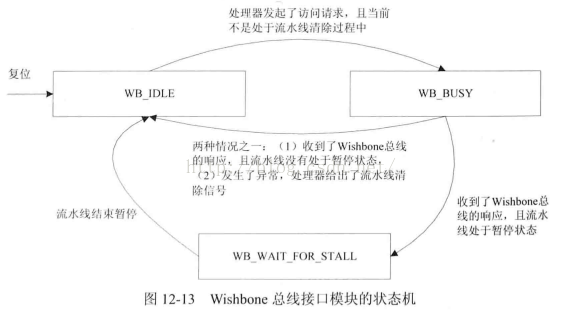
说明:根据上面那个图,可以看到哈佛结构的指令rom和数据ram,都是例化了wishbone接口,均采用点对点的方式,连接到外部的有同样wishbone接口的rom和ram中。由于只是采用了这种接口协议,针对具体的情况还得在中间再加上一层接口模块,即上图所示的状态机,一部分是控制状态转化的时序电路,另一部分是给处理器接口信号赋值的组合电路。
module openmips( input wire clk, input wire rst, input wire[5:0] int_i, //指令wishbone总线 input wire[`RegBus] iwishbone_data_i, input wire iwishbone_ack_i, output wire[`RegBus] iwishbone_addr_o, output wire[`RegBus] iwishbone_data_o, output wire iwishbone_we_o, output wire[3:0] iwishbone_sel_o, output wire iwishbone_stb_o, output wire iwishbone_cyc_o, //数据wishbone总线 input wire[`RegBus] dwishbone_data_i, input wire dwishbone_ack_i, output wire[`RegBus] dwishbone_addr_o, output wire[`RegBus] dwishbone_data_o, output wire dwishbone_we_o, output wire[3:0] dwishbone_sel_o, output wire dwishbone_stb_o, output wire dwishbone_cyc_o, output wire timer_int_o );wishbone_bus_if dwishbone_bus_if( .clk(clk), .rst(rst), //来自控制模块ctrl .stall_i(stall), .flush_i(flush), //CPU侧读写操作信息 .cpu_ce_i(ram_ce_o), .cpu_data_i(ram_data_o), .cpu_addr_i(ram_addr_o), .cpu_we_i(ram_we_o), .cpu_sel_i(ram_sel_o), .cpu_data_o(ram_data_i), //Wishbone总线侧接口 .wishbone_data_i(dwishbone_data_i), .wishbone_ack_i(dwishbone_ack_i), .wishbone_addr_o(dwishbone_addr_o), .wishbone_data_o(dwishbone_data_o), .wishbone_we_o(dwishbone_we_o), .wishbone_sel_o(dwishbone_sel_o), .wishbone_stb_o(dwishbone_stb_o), .wishbone_cyc_o(dwishbone_cyc_o), .stallreq(stallreq_from_mem) ); wishbone_bus_if iwishbone_bus_if( .clk(clk), .rst(rst), //来自控制模块ctrl .stall_i(stall), .flush_i(flush), //CPU侧读写操作信息 .cpu_ce_i(rom_ce), .cpu_data_i(32'h00000000), .cpu_addr_i(pc), .cpu_we_i(1'b0), .cpu_sel_i(4'b1111), .cpu_data_o(inst_i), //Wishbone总线侧接口 .wishbone_data_i(iwishbone_data_i), .wishbone_ack_i(iwishbone_ack_i), .wishbone_addr_o(iwishbone_addr_o), .wishbone_data_o(iwishbone_data_o), .wishbone_we_o(iwishbone_we_o), .wishbone_sel_o(iwishbone_sel_o), .wishbone_stb_o(iwishbone_stb_o), .wishbone_cyc_o(iwishbone_cyc_o), .stallreq(stallreq_from_if) );该章节源代码并没有给出有wishbone接口的rom和ram的源代码,但是从第一段的代码中可以看到实际上是要接有这么一种接口的rom和ram的。第二段代码可以看到分别实现了指令和数据的wb接口控制模块,直接接到外面的ram和rom。
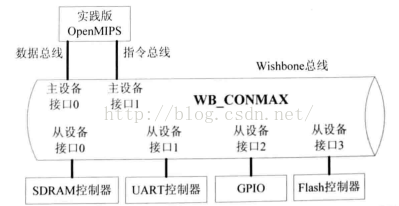
5、小型的SOPC

module openmips_min_sopc( input wire clk, input wire rst, //新增uart接口 input wire uart_in, output wire uart_out, //16位GPIO输入接口 input wire[15:0] gpio_i,</pre><pre code_snippet_id="1671506" snippet_file_name="blog_20160504_9_3260604" name="code" class="plain"> //32位GPIO输出接口 output wire[31:0] gpio_o, //flash接口 input wire[7:0] flash_data_i, output wire[21:0] flash_addr_o, output wire flash_we_o, output wire flash_rst_o, output wire flash_oe_o, output wire flash_ce_o, <span style="font-family: Arial, Helvetica, sans-serif;"> //sdrsm接口</span> output wire sdr_clk_o, output wire sdr_cs_n_o, output wire sdr_cke_o, output wire sdr_ras_n_o, output wire sdr_cas_n_o, output wire sdr_we_n_o, output wire[1:0] sdr_dqm_o, output wire[1:0] sdr_ba_o, output wire[12:0] sdr_addr_o, inout wire[15:0] sdr_dq_io ); openmips openmips0( .clk(clk), .rst(rst), // 指令wb总线接口连到wb总线互联矩阵的主设备接口1 .iwishbone_data_i(m1_data_o), .iwishbone_ack_i(m1_ack_o), .iwishbone_addr_o(m1_addr_i), .iwishbone_data_o(m1_data_i), .iwishbone_we_o(m1_we_i), .iwishbone_sel_o(m1_sel_i), .iwishbone_stb_o(m1_stb_i), .iwishbone_cyc_o(m1_cyc_i), .int_i(int), // 数据wb总线接口连到wb总线互联矩阵的主设备接口0 .dwishbone_data_i(m0_data_o), .dwishbone_ack_i(m0_ack_o), .dwishbone_addr_o(m0_addr_i), .dwishbone_data_o(m0_data_i), .dwishbone_we_o(m0_we_i), .dwishbone_sel_o(m0_sel_i), .dwishbone_stb_o(m0_stb_i), .dwishbone_cyc_o(m0_cyc_i), .timer_int_o(timer_int) ); // GPIO连到wb总线互联矩阵的从设备接口2 gpio_top gpio_top0( .wb_clk_i(clk), .wb_rst_i(rst), .wb_cyc_i(s2_cyc_o), .wb_adr_i(s2_addr_o[7:0]), .wb_dat_i(s2_data_o), .wb_sel_i(s2_sel_o), .wb_we_i(s2_we_o), .wb_stb_i(s2_stb_o), .wb_dat_o(s2_data_i), .wb_ack_o(s2_ack_i), .wb_err_o(), .wb_inta_o(gpio_int), .ext_pad_i(gpio_i_temp), .ext_pad_o(gpio_o), .ext_padoe_o() ); // fiash控制器连到wb总线互联矩阵的从设备接口3 flash_top flash_top0( .wb_clk_i(clk), .wb_rst_i(rst), .wb_adr_i(s3_addr_o), .wb_dat_o(s3_data_i), .wb_dat_i(s3_data_o), .wb_sel_i(s3_sel_o), .wb_we_i(s3_we_o), .wb_stb_i(s3_stb_o), .wb_cyc_i(s3_cyc_o), .wb_ack_o(s3_ack_i), //与小型sopc外部接口相连,对外是flash芯片 .flash_adr_o(flash_addr_o), .flash_dat_i(flash_data_i), .flash_rst(flash_rst_o), .flash_oe(flash_oe_o), .flash_ce(flash_ce_o), .flash_we(flash_we_o) ); // uart控制器连到wb总线互联矩阵的从设备接口1 uart_top uart_top0( .wb_clk_i(clk), .wb_rst_i(rst), .wb_adr_i(s1_addr_o[4:0]), .wb_dat_i(s1_data_o), .wb_dat_o(s1_data_i), .wb_we_i(s1_we_o), .wb_stb_i(s1_stb_o), .wb_cyc_i(s1_cyc_o), .wb_ack_o(s1_ack_i), .wb_sel_i(s1_sel_o), .int_o(uart_int), //连接uart接口 .stx_pad_o(uart_out), .srx_pad_i(uart_in), .cts_pad_i(1'b0), .dsr_pad_i(1'b0), .ri_pad_i(1'b0), .dcd_pad_i(1'b0), .rts_pad_o(), .dtr_pad_o() ); // sdram控制器连到wb总线互联矩阵的从设备接口0 sdrc_top sdrc_top0( .cfg_sdr_width(2'b01), .cfg_colbits(2'b00), .wb_rst_i(rst), .wb_clk_i(clk), .wb_stb_i(s0_stb_o), .wb_ack_o(s0_ack_i), .wb_addr_i({s0_addr_o[25:2],2'b00}), .wb_we_i(s0_we_o), .wb_dat_i(s0_data_o), .wb_sel_i(s0_sel_o), .wb_dat_o(s0_data_i), .wb_cyc_i(s0_cyc_o), .wb_cti_i(3'b000), //连接sdram .sdram_clk(clk), .sdram_resetn(~rst), .sdr_cs_n(sdr_cs_n_o), .sdr_cke(sdr_cke_o), .sdr_ras_n(sdr_ras_n_o), .sdr_cas_n(sdr_cas_n_o), .sdr_we_n(sdr_we_n_o), .sdr_dqm(sdr_dqm_o), .sdr_ba(sdr_ba_o), .sdr_addr(sdr_addr_o), .sdr_dq(sdr_dq_io), //Parameters .sdr_init_done(sdram_init_done), .cfg_req_depth(2'b11), .cfg_sdr_en(1'b1), .cfg_sdr_mode_reg(13'b0000000110001), .cfg_sdr_tras_d(4'b1000), .cfg_sdr_trp_d(4'b0010), .cfg_sdr_trcd_d(4'b0010), .cfg_sdr_cas(3'b100), .cfg_sdr_trcar_d(4'b1010), .cfg_sdr_twr_d(4'b0010), .cfg_sdr_rfsh(12'b011010011000), .cfg_sdr_rfmax(3'b100) ); wb_conmax_top wb_conmax_top0( .clk_i(clk), .rst_i(rst), // Master 0 Interface,数据接口 .m0_data_i(m0_data_i), .m0_data_o(m0_data_o), .m0_addr_i(m0_addr_i), .m0_sel_i(m0_sel_i), .m0_we_i(m0_we_i), .m0_cyc_i(m0_cyc_i), .m0_stb_i(m0_stb_i), .m0_ack_o(m0_ack_o), // Master 1 Interface,指令接口 .m1_data_i(m1_data_i), .m1_data_o(m1_data_o), .m1_addr_i(m1_addr_i), .m1_sel_i(m1_sel_i), .m1_we_i(m1_we_i), .m1_cyc_i(m1_cyc_i), .m1_stb_i(m1_stb_i), .m1_ack_o(m1_ack_o), // Slave 0 Interface,sdram控制器 .s0_data_i(s0_data_i), .s0_data_o(s0_data_o), .s0_addr_o(s0_addr_o), .s0_sel_o(s0_sel_o), .s0_we_o(s0_we_o), .s0_cyc_o(s0_cyc_o), .s0_stb_o(s0_stb_o), .s0_ack_i(s0_ack_i), .s0_err_i(1'b0), .s0_rty_i(1'b0), // Slave 1 Interface,uart控制器 .s1_data_i(s1_data_i), .s1_data_o(s1_data_o), .s1_addr_o(s1_addr_o), .s1_sel_o(s1_sel_o), .s1_we_o(s1_we_o), .s1_cyc_o(s1_cyc_o), .s1_stb_o(s1_stb_o), .s1_ack_i(s1_ack_i), .s1_err_i(1'b0), .s1_rty_i(1'b0), // Slave 2 Interface,gpio接口 .s2_data_i(s2_data_i), .s2_data_o(s2_data_o), .s2_addr_o(s2_addr_o), .s2_sel_o(s2_sel_o), .s2_we_o(s2_we_o), .s2_cyc_o(s2_cyc_o), .s2_stb_o(s2_stb_o), .s2_ack_i(s2_ack_i), .s2_err_i(1'b0), .s2_rty_i(1'b0), // Slave 3 Interface,flash控制器 .s3_data_i(s3_data_i), .s3_data_o(s3_data_o), .s3_addr_o(s3_addr_o), .s3_sel_o(s3_sel_o), .s3_we_o(s3_we_o), .s3_cyc_o(s3_cyc_o), .s3_stb_o(s3_stb_o), .s3_ack_i(s3_ack_i), .s3_err_i(1'b0), .s3_rty_i(1'b0), );endmodule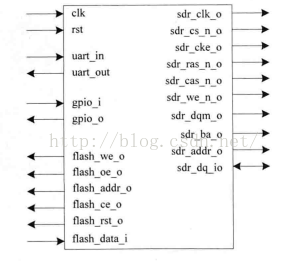
从上面可以看到是怎么集成进去的。全书写了几个外设模块的原理,但是一个关键的wb_conmax的实现原理,其实现了总线的上述诸多功能,包括仲裁等。这里只是直接拿来用了,理清这些关系很重要。
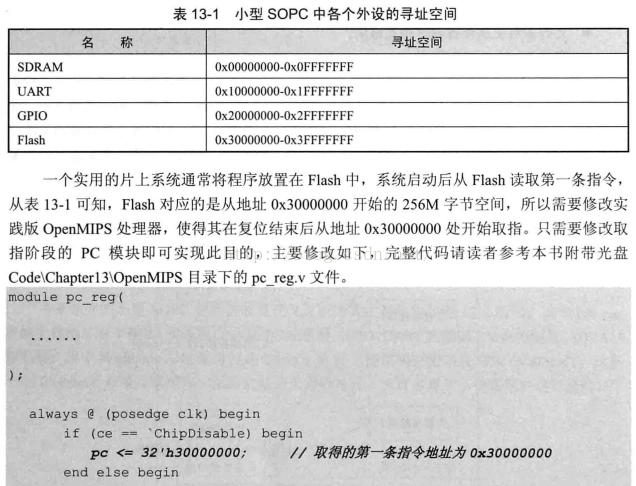
为什么flash的地址是0x30000000开始,因为我们是把他接在从设备3了。wb_conmax有规定,根据从设备来设定地址区段。
这些外置的接口ip都是通过mcu操纵其ip内部的寄存器来实现的。比如gpio:
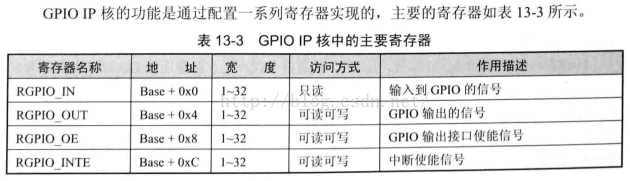

所以要知道外部io口上的数据,只需内核去读这个地址的RGPIO_IN的这个寄存器就可以了。
所以我们实际上理解的编译器,实际上只是将我们的c语言代码编译成最核心的流水线内核的操作指令,涉及到外设的部分仅仅是生成一些操作寄存器的指令,即编译器只是理解外设与寄存器一致,只需生成访存和写回的指令即可。
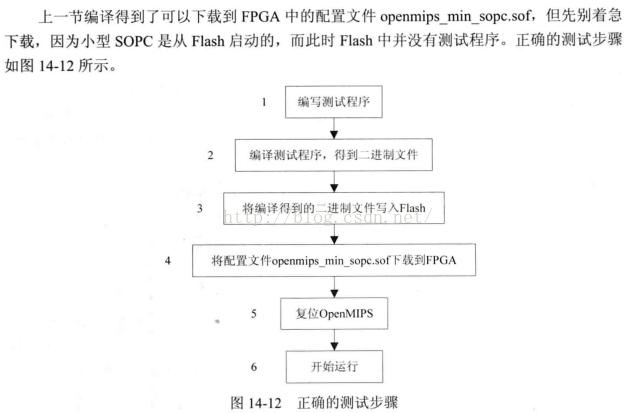
6、测试与验证
在上面实现后怎么验证,作者用de2的开发板:
由于与mips指令兼容,所以可以使用mips的编译器,生成了inst_rom.o的可重定位elf文件,通过ld文件生成可执行文件,但是有elf文件头,与我们期望的格式还是有很大差别,可以利用mips-sde-elf-objcopy得到.bin的纯二进制格式,这正是我们需要的。(如果是用modelsim仿真,还需将其生成modelsim中存储器初始化文件的格式生成.data文件)
de2中将利用控制面板程序擦写进flash。
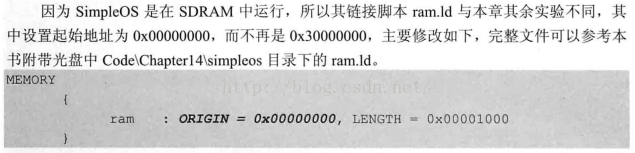
注意在编译前要修改ram.ld文件,将其中的起始地址从0x00000000修改为0x30000000,因为前2个测试陈旭是在flash中运行的,而flash的起始地址是0x30000000.
例子3模拟了os的启动过程:
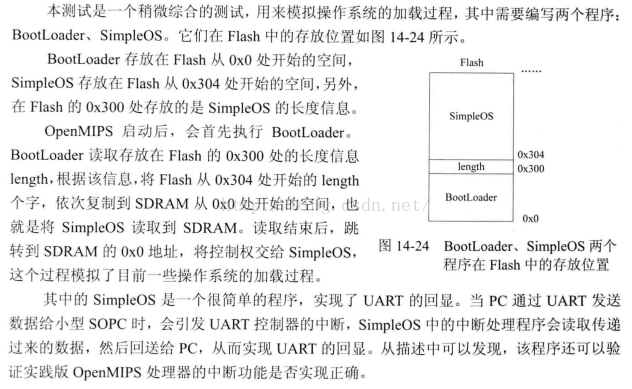
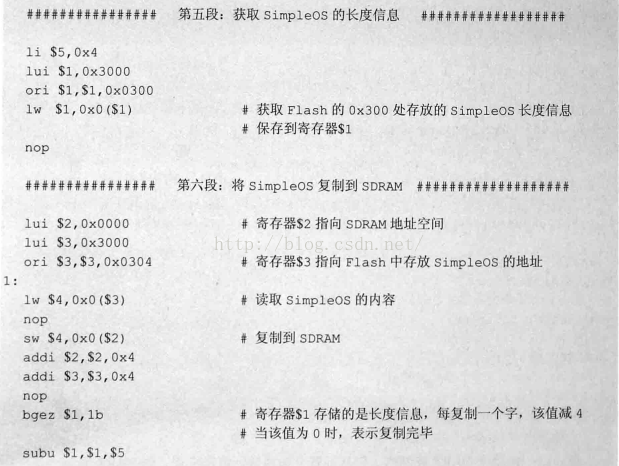

后面是应用程序:


怎么写入flash呢?



给我老师的人工智能教程打call!http://blog.csdn.net/jiangjunshow
