- 转载请注明文章地址 http://wiki.100ask.org/Linux_devicetree
这一课是设备树中最重要的一课。
前面我们从内核文档了解到,对于设备树,它里面描述的信息可以分为这三部分:
Linux uses DT data for three major purposes:
- platform identification,
- runtime configuration, and
- device population.
事实上,内核对设备树的处理,也会分为与其对应的三部分:
对于platform identification,将在第02节_对设备树中平台信息的处理(选择machine_desc)进行分析;
对于runtime configuration,将在第03节_对设备树中运行时配置信息的处理进行分析;
对于device population,将在第04-06节进行分析;
第01节_从源头分析_内核head.S对dtb的简单处理
现在我们开始第一节,我们要从源头分析,uboot将一些参数,设备树文件传给内核,那么内核如何处理这些设备树文件呢?
我们需要从内核的第一个执行文件head.S开始分析。
r0,r1,r2三个寄存器的设置
bootloader启动内核时,会设置r0,r1,r2三个寄存器,
r0一般设置为0;
r1一般设置为machine id (在使用设备树时该参数没有被使用);
r2一般设置ATAGS或DTB的开始地址;
这里的machine id,是让内核知道是哪个CPU,从而调用对应的初始化函数。
以前没有使用设备树时,需要bootloader传一个machine id给内核,现在使用设备树的话,这个参数就不需要设置了。
r2要么是以前的ATAGS开始地址,要么是现在使用设备树后的DTB文件开始地址。
对于ATAGS传参方法, 可以参考我们的"毕业班视频-自己写bootloader"
从www.100ask.net下载页面打开百度网盘,
打开如下目录:
100ask分享的所有文件
006_u-boot_内核_根文件系统(新1期_2期间的衔接)
视频
第002课_从0写bootloader_更深刻理解bootloader
head.S的内容
内核head.S所做工作如下:
a. __lookup_processor_type : 使用汇编指令读取CPU ID, 根据该ID找到对应的proc_info_list结构体(里面含有这类CPU的初始化函数、信息)
b. __vet_atags : 判断是否存在可用的ATAGS或DTB
c. __create_page_tables : 创建页表, 即创建虚拟地址和物理地址的映射关系
d. __enable_mmu : 使能MMU, 以后就要使用虚拟地址了
e. __mmap_switched : 上述函数里将会调用__mmap_switched
f. 把bootloader传入的r2参数, 保存到变量__atags_pointer中
g. 调用C函数start_kernel
##最终效果
head.S和head-common.S最终效果:
把bootloader传来的r1值, 赋给了C变量: __machine_arch_type
把bootloader传来的r2值,
第02节_对设备树中平台信息的处理(选择machine_desc)
这节讲解内核对设备树中平台设备信息是如何处理的。
内核是如何选择对应的machine_desc?
前面讲解到,一个编译成uImage的内核镜像文件,可以支持多个单板,这里假设支持smdk2410、smdk2440、jz2440(其中smdk2410、smdk2440是厂家的公板,国内的厂家参考公板设计出了自己的板子,比如jz2440)。
这些板子的配置稍有不同,需要做一些单独的初始化,在内核里面,对于这些单板,都构造了一个machine_desc结构体,里面有.init和.nr。
对于JZ2440,它源自smdk2440,内核没有它的单独文件,它使用smdk2440的相关文件,代码。
在上一节视频里面我们说过,以前uboot使用ATAGS给内核传参数时,它会传入一个机器ID,内核会使用这个机器ID找到最合适的machine_desc。即机器ID与machine_desc里面的.nr比较,相等就表示找到了对应的machine_desc。
当我们的uboot不使用ATAGS传参数,而使用DTB文件时,那么这时内核是如何选择对应的machine_desc呢?
在设备树文件的根节点里,有如下两行:
model = "SMDK24440";
compatible = "samsung,smdk2440","samsung,smdk24140","samsung,smdk24xx";
这里的compatible属性声明想要什么machine_desc,属性值可以是一系列字符串,依次与machine_desc匹配。
内核最好支持samsung,smdk2440,如果不支持,再尝试是否支持samsung,smdk24140,再不支持,最后尝试samsung,smdk24xx</code
- 总结如下:
a. 设备树根节点的compatible属性列出了一系列的字符串,
表示它兼容的单板名,从"最兼容"到次之;
b. 内核中有多个machine_desc,
其中有dt_compat成员, 它指向一个字符串数组, 里面表示该machine_desc支持哪些单板;
c. 使用compatile属性的值, 跟’’‘每一个machine_desc.dt_compat’’'比较,
成绩为"吻合的compatile属性值的位置",
成绩越低越匹配, 对应的machine_desc即被选中
start_kernel的调用过程
上节视频里,head.S会把DTB的位置保存在变量__atags_pointer里,最后调用start_kernel。
start_kernel的调用过程如下:
start_kernel // init/main.c
setup_arch(&command_line); // arch/arm/kernel/setup.c
mdesc = setup_machine_fdt(__atags_pointer); // arch/arm/kernel/devtree.c
early_init_dt_verify(phys_to_virt(dt_phys) // 判断是否有效的dtb, drivers/of/ftd.c
initial_boot_params = params;
mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach); // 找到最匹配的machine_desc, drivers/of/ftd.c
while ((data = get_next_compat(&compat))) {
score = of_flat_dt_match(dt_root, compat);
if (score > 0 && score < best_score) {
best_data = data;
best_score = score;
}
}
machine_desc = mdesc;
第03节_对设备树中运行时配置信息的处理
设备树只是起一个信息传递的作用,对这些信息配置的处理,也比较简单,即从设备树的DTB文件中,把这些设备信息提取出来赋给内核中的某个变量即可。
函数调用过程如下:
start_kernel // init/main.c
setup_arch(&command_line); // arch/arm/kernel/setup.c
mdesc = setup_machine_fdt(__atags_pointer); // arch/arm/kernel/devtree.c
early_init_dt_scan_nodes(); // drivers/of/ftd.c
/* Retrieve various information from the /chosen node */
of_scan_flat_dt(early_init_dt_scan_chosen, boot_command_line);
/* Initialize {size,address}-cells info */
of_scan_flat_dt(early_init_dt_scan_root, NULL);
/* Setup memory, calling early_init_dt_add_memory_arch */
of_scan_flat_dt(early_init_dt_scan_memory, NULL);
里面主要对三种类型的信息进行处理,分别是:/chosen节点中 bootargs属性,根节点的 #address-cells 和 #size-cells属性,/memory中的 reg属性。
1./chosen节点中bootargs属性就是内核启动的命令行参数,它里面可以指定根文件系统在哪里,第一个运行的应用程序是哪一个,指定内核的打印信息从哪个设备里打印出来。
2./memory中的reg属性指定了不同板子内存的大小和起始地址。
3.根节点的#address-cells和#size-cells属性指定属性参数的位数,比如指定前面memory中的reg属性的地址是32位还是64位,大小是用一个32位表示,还是两个32位表示。
- 总结:
a. /chosen节点中bootargs属性的值, 存入全局变量: boot_command_line
b. 确定根节点的这2个属性的值: #address-cells, #size-cells
存入全局变量: dt_root_addr_cells, dt_root_size_cells
c. 解析/memory中的reg属性, 提取出"base, size", 最终调用memblock_add(base, size);
第04节_dtb转换为device_node(unflatten)
在讲解之前,我们先想一个问题,我们的uboot把设备树DTB文件随便放到内存的某一个地方就可以使用,为什么内核运行中,他不会去覆盖DTB所占用的那块内存呢?
在前面我们讲解设备树格式时,我们知道,在设备树文件中,可以使用/memreserve/指定一块内存,这块内存就是保留的内存,内核不会占用它。即使你没有指定这块内存,当我们内核启动时,他也会把设备树所占用的区域保留下来。
如下就是函数调用过程:
start_kernel // init/main.c
setup_arch(&command_line); // arch/arm/kernel/setup.c
arm_memblock_init(mdesc); // arch/arm/kernel/setup.c
early_init_fdt_reserve_self();
/* Reserve the dtb region */
// 把DTB所占区域保留下来, 即调用: memblock_reserve
early_init_dt_reserve_memory_arch(__pa(initial_boot_params),
fdt_totalsize(initial_boot_params),
0);
early_init_fdt_scan_reserved_mem(); // 根据dtb中的memreserve信息, 调用memblock_reserve
unflatten_device_tree(); // arch/arm/kernel/setup.c
__unflatten_device_tree(initial_boot_params, NULL, &of_root,
early_init_dt_alloc_memory_arch, false); // drivers/of/fdt.c
/* First pass, scan for size */
size = unflatten_dt_nodes(blob, NULL, dad, NULL);
/* Allocate memory for the expanded device tree */
mem = dt_alloc(size + 4, __alignof__(struct device_node));
/* Second pass, do actual unflattening */
unflatten_dt_nodes(blob, mem, dad, mynodes);
populate_node
np = unflatten_dt_alloc(mem, sizeof(struct device_node) + allocl,
__alignof__(struct device_node));
np->full_name = fn = ((char *)np) + sizeof(*np);
populate_properties
pp = unflatten_dt_alloc(mem, sizeof(struct property),
__alignof__(struct property));
pp->name = (char *)pname;
pp->length = sz;
pp->value = (__be32 *)val;
可以看到,先把dtb中的memreserve信息告诉内核,把这块内存区域保留下来,不占用它。
然后将扁平结构的设备树提取出来,构造成一个树,这里涉及两个结构体:device_node结构体和property结构体。弄清楚这两个结构体就大概明白这节视频的主要内容了。
在dts文件里,每个大括号{ }代表一个节点,比如根节点里有个大括号,对应一个device_node结构体;memory也有一个大括号,也对应一个device_node结构体。
节点里面有各种属性,也可能里面还有子节点,所以它们还有一些父子关系。
根节点下的memory、chosen、led等节点是并列关系,兄弟关系。
对于父子关系、兄弟关系,在device_node结构体里面肯定有成员来描述这些关系。
打开include/linux/Of.h可以看到device_node结构体的定义如下:
struct device_node {
const char *name; // 来自节点中的name属性, 如果没有该属性, 则设为"NULL"
const char *type; // 来自节点中的device_type属性, 如果没有该属性, 则设为"NULL"
phandle phandle;
const char *full_name; // 节点的名字, node-name[@unit-address]
struct fwnode_handle fwnode;
struct property *properties; // 节点的属性
struct property *deadprops; /* removed properties */
struct device_node *parent; // 节点的父亲
struct device_node *child; // 节点的孩子(子节点)
struct device_node *sibling; // 节点的兄弟(同级节点)
#if defined(CONFIG_OF_KOBJ)
struct kobject kobj;
#endif
unsigned long _flags;
void *data;
#if defined(CONFIG_SPARC)
const char *path_component_name;
unsigned int unique_id;
struct of_irq_controller *irq_trans;
#endif
};
device_node结构体表示一个节点,property结构体表示节点的具体属性。
properties结构体的定义如下:
```c
struct property {
char *name; // 属性名字, 指向dtb文件中的字符串
int length; // 属性值的长度
void *value; // 属性值, 指向dtb文件中value所在位置, 数据仍以big endian存储
struct property *next;
#if defined(CONFIG_OF_DYNAMIC) || defined(CONFIG_SPARC)
unsigned long _flags;
#endif
#if defined(CONFIG_OF_PROMTREE)
unsigned int unique_id;
#endif
#if defined(CONFIG_OF_KOBJ)
struct bin_attribute attr;
#endif
};
两个结构体与dts内容的对于关系如下:
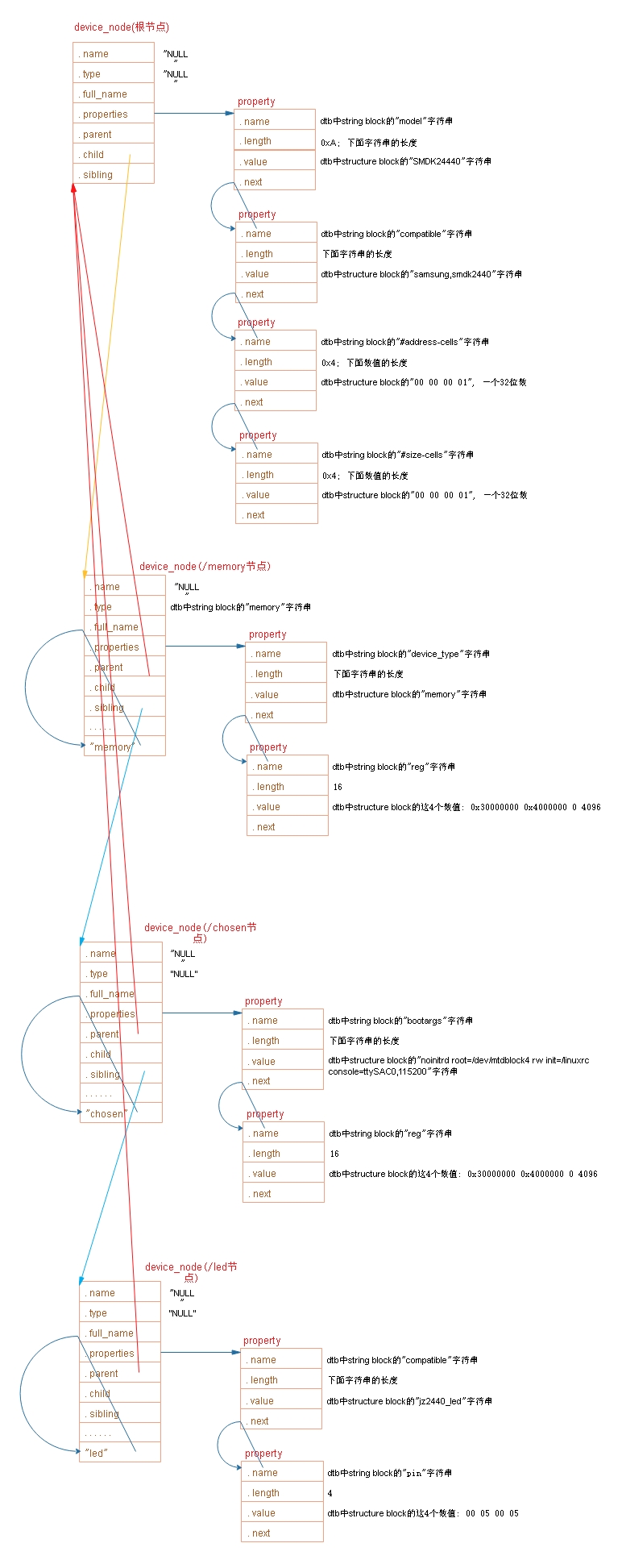
具体的代码分析,参考视频内容。
第05节_device_node转换为platform_device
内核如何把device_node转换成platfrom_device
两个问题
a.那些device_node可以转换为platform_device
/ {
model = "SMDK24440";
compatible = "samsung,smdk2440";
#address-cells = <1>;
#size-cells = <1>;
//内存设备不会
memory@30000000 {
device_type = "memory";
reg = <0x30000000 0x4000000>;
};
/*
cpus {
cpu {
compatible = "arm,arm926ej-s";
};
};
*/ //只是设置一些启动信息
chosen {
bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";
};
/*只有这个led设备才对转换成platfrom_device */
led {
compatible = "jz2440_led";
reg = <S3C2410_GPF(5) 1>;
};
/************************************/
};
- a. 内核函数of_platform_default_populate_init, 遍历device_node树, 生成platform_device
- b. 并非所有的device_node都会转换为platform_device只有以下的device_node会转换:
-
- b.1 该节点必须含有compatible属性
-
- b.2 根节点的子节点(节点必须含有compatible属性)
-
- b.3 含有特殊compatible属性的节点的子节点(子节点必须含有compatible属性):
这些特殊的compatilbe属性为:“simple-bus”,“simple-mfd”,“isa”,"arm,amba-bus "
- b.3 含有特殊compatible属性的节点的子节点(子节点必须含有compatible属性):
根节点是例外的,生成platfrom_device时,即使有compatible属性也不会处理
举例
cpu可以访问很多外设,spi控制器 I2c控制器,led
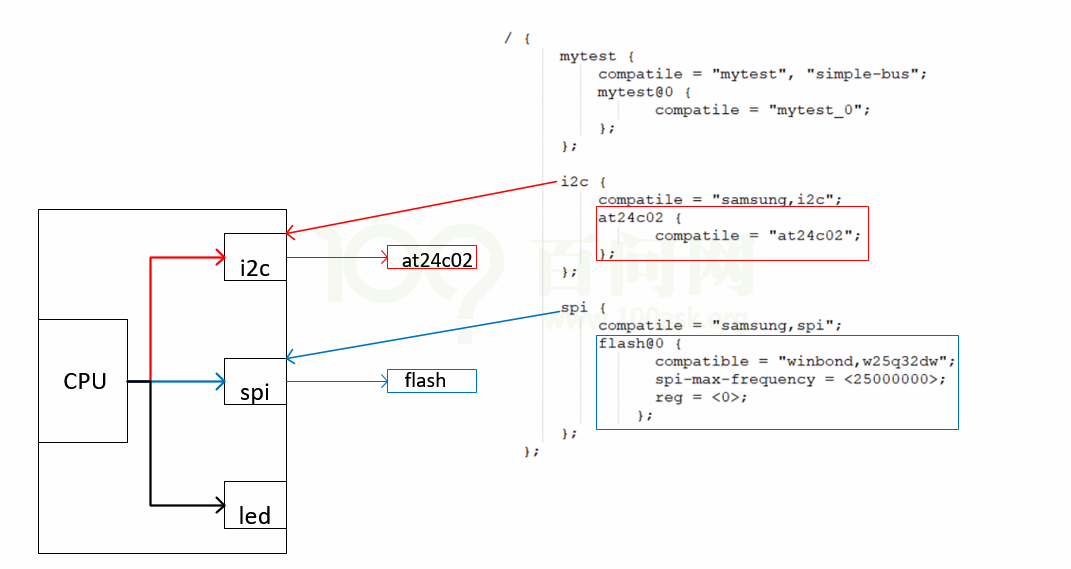
如何在设备树中描述这些硬件?
b.4 示例: 比如以下的节点,
/mytest会被转换为platform_device,
因为它兼容"simple-bus", 它的子节点/mytest/mytest@0 也会被转换为platform_device
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/i2c/at24c02节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个i2c_client。
类似的也有/spi节点, 它一般也是用来表示SPI控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/spi/flash@0节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个spi_device。
/ {
mytest {
compatile = "mytest", "simple-bus";
mytest@0 {
compatile = "mytest_0";
};
};
i2c {
compatile = "samsung,i2c";
at24c02 {
compatile = "at24c02";
};
};
spi {
compatile = "samsung,spi";
flash@0 {
compatible = "winbond,w25q32dw";
spi-max-frequency = <25000000>;
reg = <0>;
};
};
};
b.怎么转换
函数调用过程:
a. 入口函数 of_platform_default_populate_init (drivers/of/platform.c) 被调用到过程:

里面有段属性,编译内核段属性的变量会被集中放在一起
vim arch/arm/kernel/vmlinux.lds
start_kernel // init/main.c
rest_init();
pid = kernel_thread(kernel_init, NULL, CLONE_FS);
kernel_init
kernel_init_freeable();
do_basic_setup();
do_initcalls();
for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++)
do_initcall_level(level); // 比如 do_initcall_level(3)
for (fn = initcall_levels[3]; fn < initcall_levels[3+1]; fn++)
do_one_initcall(initcall_from_entry(fn)); // 就是调用"arch_initcall_sync(fn)"中定义的fn函数
b. of_platform_default_populate_init (drivers/of/platform.c) 生成platform_device的过程:
遍历device树
图3
of_platform_default_populate_init
of_platform_default_populate(NULL, NULL, NULL);
of_platform_populate(NULL, of_default_bus_match_table, NULL, NULL)
for_each_child_of_node(root, child) {
rc = of_platform_bus_create(child, matches, lookup, parent, true); // 调用过程看下面
dev = of_device_alloc(np, bus_id, parent); // 根据device_node节点的属性设置platform_device的resource
if (rc) {
of_node_put(child);
break;
}
}
c. of_platform_bus_create(bus, matches, …)的调用过程(处理bus节点生成platform_devie, 并决定是否处理它的子节点):
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent); // 生成bus节点的platform_device结构体
if (!dev || !of_match_node(matches, bus)) // 如果bus节点的compatile属性不吻合matches成表, 就不处理它的子节点
return 0;
for_each_child_of_node(bus, child) { // 取出每一个子节点
pr_debug(" create child: %pOF\n", child);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict); // 处理它的子节点, of_platform_bus_create是一个递归调用
if (rc) {
of_node_put(child);
break;
}
}
d. I2C总线节点的处理过程:
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
platform_driver的probe函数中会调用i2c_add_numbered_adapter:
i2c_add_numbered_adapter // drivers/i2c/i2c-core-base.c
__i2c_add_numbered_adapter
i2c_register_adapter
of_i2c_register_devices(adap); // drivers/i2c/i2c-core-of.c
for_each_available_child_of_node(bus, node) {
client = of_i2c_register_device(adap, node);
client = i2c_new_device(adap, &info); // 设备树中的i2c子节点被转换为i2c_clien
第06节_platform_device跟platform_driver的匹配

drivers/base/platform.c
a. 注册 platform_driver 的过程:
platform_driver_register
__platform_driver_register
drv->driver.probe = platform_drv_probe;
driver_register
bus_add_driver
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers); // 把 platform_driver 放入 platform_bus_type 的driver链表中
driver_attach
bus_for_each_dev(drv->bus, NULL, drv, __driver_attach); // 对于plarform_bus_type下的每一个设备, 调用__driver_attach
__driver_attach
ret = driver_match_device(drv, dev); // 判断dev和drv是否匹配成功
return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用 platform_bus_type.match
driver_probe_device(drv, dev);
really_probe
drv->probe // platform_drv_probe
platform_drv_probe
struct platform_driver *drv = to_platform_driver(_dev->driver);
drv->probe
b. 注册 platform_device 的过程:
platform_device_register
platform_device_add
device_add
bus_add_device
klist_add_tail(&dev->p->knode_bus, &bus->p->klist_devices); // 把 platform_device 放入 platform_bus_type的device链表中
bus_probe_device(dev);
device_initial_probe
__device_attach
ret = bus_for_each_drv(dev->bus, NULL, &data, __device_attach_driver); // // 对于plarform_bus_type下的每一个driver, 调用 __device_attach_driver
__device_attach_driver
ret = driver_match_device(drv, dev);
return drv->bus->match ? drv->bus->match(dev, drv) : 1; // 调用platform_bus_type.match
driver_probe_device
匹配函数是platform_bus_type.match, 即platform_match,
匹配过程按优先顺序罗列如下:
- 比较 platform_dev.driver_override 和 platform_driver.drv->name
- 比较 platform_dev.dev.of_node的compatible属性 和 platform_driver.drv->of_match_table
- 比较 platform_dev.name 和 platform_driver.id_table
- 比较 platform_dev.name 和 platform_driver.drv->name
有一个成功, 即匹配成功
第07节_内核中设备树的操作函数
include/linux/目录下有很多of开头的头文件:
dtb -> device_node -> platform_device
a. 处理DTB
of_fdt.h // dtb文件的相关操作函数, 我们一般用不到, 因为dtb文件在内核中已经被转换为device_node树(它更易于使用)
b. 处理device_node
of.h // 提供设备树的一般处理函数, 比如 of_property_read_u32(读取某个属性的u32值), *of_get_child_count(获取某个device_node的子节点数)
of_address.h // 地址相关的函数, 比如 of_get_address(获得reg属性中的addr, size值)
of_match_device(从matches数组中取出与当前设备最匹配的一项)
of_dma.h // 设备树中DMA相关属性的函数
of_gpio.h // GPIO相关的函数
of_graph.h // GPU相关驱动中用到的函数, 从设备树中获得GPU信息
of_iommu.h // 很少用到
of_irq.h // 中断相关的函数
of_mdio.h // MDIO (Ethernet PHY) API
of_net.h // OF helpers for network devices.
of_pci.h // PCI相关函数
of_pdt.h // 很少用到
of_reserved_mem.h // reserved_mem的相关函数
以中断相关的作为例子
一个设备可以发出中断,必须包含中断号和中断触发方式
官方设备树规格书里面的设备示例
soc {
#address-cells = <1>;
#size-cells = <1>;
serial {
compatible = "ns16550";
reg = <0x4600 0x100>;
clock-frequency = <0>;
interrupts = <0xA 0x8>;
interrupt-parent = <&ipic>;
};
};
里面的属性里面有中断值
通过
int of_irq_parse_one(struct device_node *device, int index,
struct of_phandle_args *out_irq);
解析某一对值,或者我们可以解析原始数据
int of_irq_parse_raw(const __be32 *addr, struct of_phandle_args *out_irq);
addr就指向了某一对值,把里面的中断号中断触发方式解析出来,保存在of_phandle_args结构体中
c. 处理 platform_device
of_platform.h // 把device_node转换为platform_device时用到的函数,
/* Platform drivers register/unregister */
extern struct platform_device *of_device_alloc(struct device_node *np,
const char *bus_id,
struct device *parent);
文件涉及的函数在 device_node -> platform_device 中大量使用
// 比如of_device_alloc(根据device_node分配设置platform_device),
// of_find_device_by_node (根据device_node查找到platform_device),
// of_platform_bus_probe (处理device_node及它的子节点)
of_device.h // 设备相关的函数, 比如 of_match_device
可以通过of_match_device找出哪一项最匹配,
of文件分为三类
- 处理DTB
- 处理device_node
- 处理 platform_device 设备相关信息
第08节_在根文件系统中查看设备树(有助于调试)
a. /sys/firmware/fdt // 查看原始dtb文件
hexdump -C /sys/firmware/fdt
b. /sys/firmware/devicetree // 以目录结构程现的dtb文件, 根节点对应base目录, 每一个节点对应一个目录, 每一个属性对应一个文件
比如查看 #address-cells 的16进制
hexdump -C “#address-cells”
查看compatible
cat compatible
如果你在设备树设备节点中设置一个错误的中断属性,那么就导致led对应的平台设备节点没办法创建
c. /sys/devices/platform // 系统中所有的platform_device, 有来自设备树的, 也有来有.c文件中注册的
对于来自设备树的platform_device, 可以进入 /sys/devices/platform/<设备名>/of_node 查看它的设备树属性
d. /proc/device-tree 是链接文件, 指向 /sys/firmware/devicetree/base
朋友您好,上面的内容过瘾不?如果还想了解更多可以去淘宝搜索"设备树" 进入"韦东山老师个人店"购买设备树视频,29节只要69元,超级划算!