原创内容,如若喜欢,转载时请在开篇处注明出处
车辆网领域有个关键ECU——TBOX,本文围绕TBOX的FOTA升级业务展开。主要讲如何通过CANoe的仿真程序实现自动化测试, 验证TBOX在FOTA业务过程中作为一个诊断仪刷写整车其它ECU的流程以及业务逻辑处理的正确性。通常情况下,主机厂都采用实车测试的方式验证FOTA业务。但是实车测试对对手件的稳定性有很高要求,在整车项目开发的很长周期内,整车上的所有的ECU都处于开发阶段,我们前期是无法开展TBOX的FOTA功能的验证工作的,所以仿真测试就势在必行了。闲话少讲 切入正题。
一、业务需求拆分
FOTA(Firmware Over-The-Air), 关键行为拆分为两点:下载 and 安装。
无论实测测试亦或仿真测试,“下载”这个过程都是一样的,并且“下载”不必需依赖于实车,也不依赖于对手件。所以需要仿真的部分集中在车内网络。主要问题就是解决车内ECU的仿真,总线网络节点建模,ECU逻辑实现。
二、物理组网环境
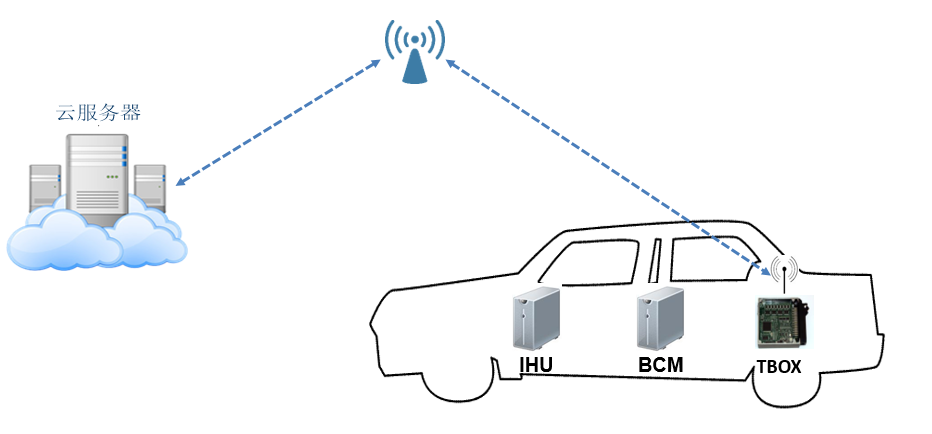
分析实车与仿真的差异,先列出脱离实车后组网模型上的必需件。12V B+供电源,业务触发的必需件ECU(根据TBOX的功能设计可确定必需存在的ECU),仿真设备CANoe, 工作站PC
实车测试组网示意图:
仿真测试组网示意图:
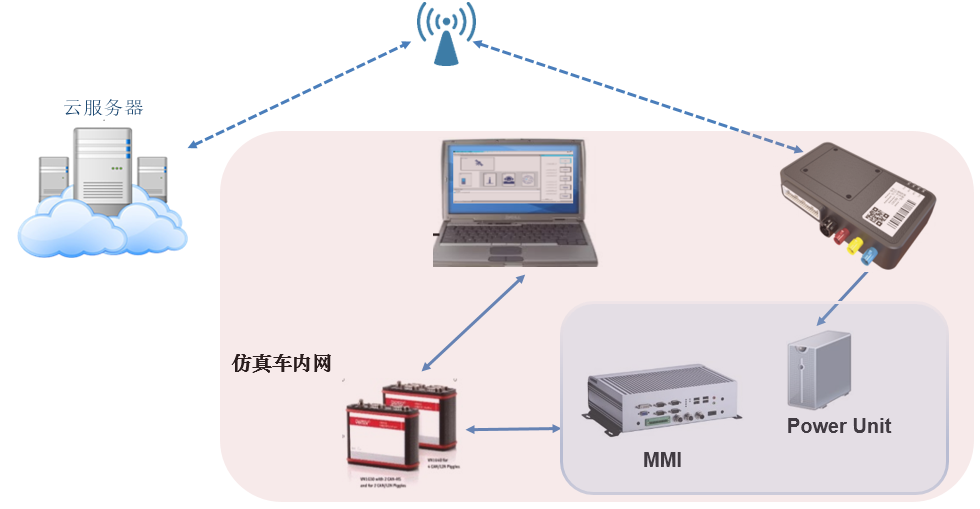
对比可以看到,仿真的测试方案新接入了电源,除了必需存在的主机外,其余的ECU(EPS,PEPS,BCM,ACU,TCU等)全由{PC+CANoe}仿真实现。
三、测试方案选择
例如,此处被测TBOX的FOTA安装过程,业务设计是基于UDS协议实现的刷写,通过CAN总线传输数据。所以此处FOTA安装的本质是编程模式下的诊断写入过程。(延伸:个人认为通过Ethernet总线传输数据,是车联网+智能驾驶未来发展的必然趋势,它可以更高效的传输,承载庞大的数据量,相对较低的成本)
我们透析需求,实际上就需要做一件事:编程实现车内行为仿真。抽丝剥茧,层层深挖下来又是两点需求
1、车内通信信号的仿真
2、诊断的请求与应答(被刷写ECU的应用层业务逻辑封装)
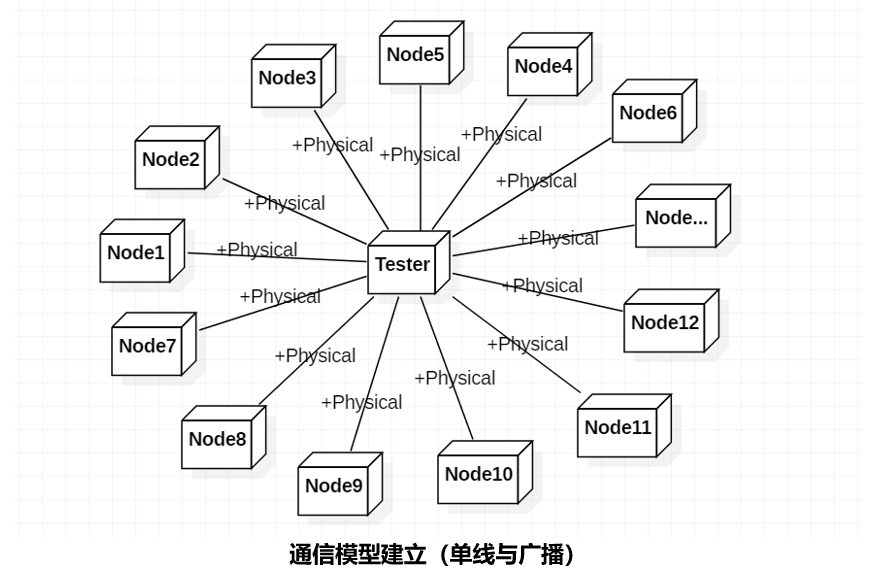
重点讲第2点,前面讲过FOTA安装过程中TBOX扮演了诊断仪的角色,所以实现第2点的需求时,需满足单对单的物理寻址请求,单对多的广播式功能寻址请求。
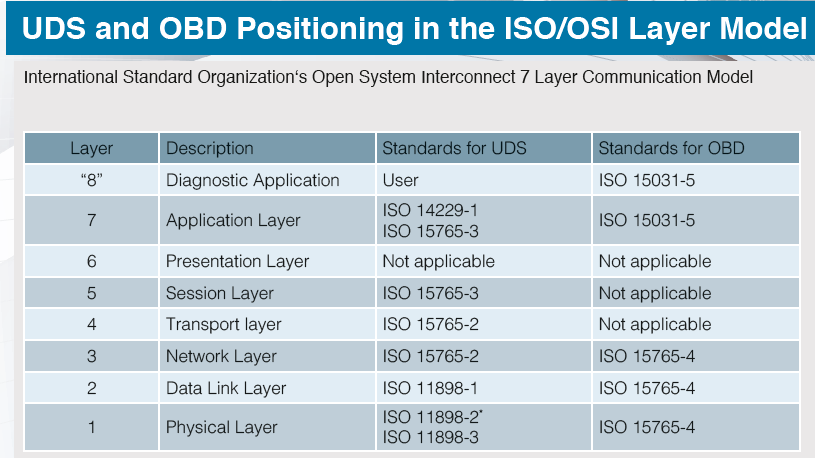
我的设计思路是建立两条链路,分别支持物理寻址,功能寻址。接下来是选择从哪一层去实现,不同层应用的协议不一样,其实现的复杂程度也不一样。举个例子,要建一个Client与Server进行网络通信,如果你对底层比较清晰,可以直接采用套接字实现。否则你可以选择较上层的协议去实现。
CAN总线的通信也是符合OSI模型,见下图:
分析优缺点:
从物理层切入实现,需兼顾帧格式的问题,包含多帧分包传输,流控策略,连续帧拆分与组装等麻烦事情,在保证数据正确性上要写过多逻辑。且对ISO11898有比较深的了解。 整体框架和逻辑简单,可扩展性差。
从传输层切入实现,托管了数据处理的细节,ECU间的耦合度低,是比较好的选择。不过框架设计会复杂一些。
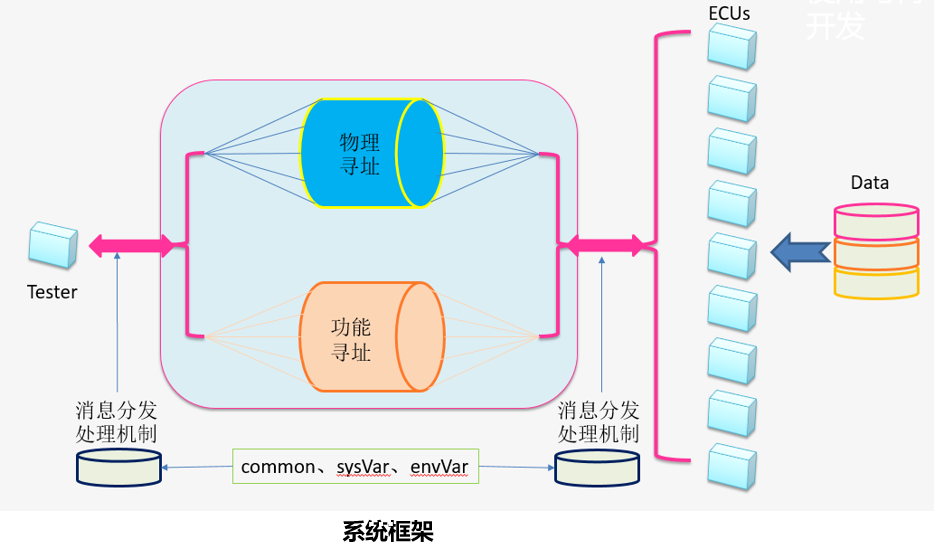
具体实现方案:基于CANoe的CanTp建模库,在CAN上实现了传输协议ISO/DIS 15765–2,控制传输大量数据,支持多通道并发。仿真整车上支持OTA的节点,每个节点都可通过两个连接(物理寻址-Connection 1 和 功能寻址-Connection 2),使用OSEK TP节点层DLL与诊断仪通信,在同一连接上在同一时间可以发送和接收数据。仿真FOTA刷写流程。
通信模型与系统框架:
CAPL代码具体实现,详见下一篇