版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/jjjwwwjjjwww/article/details/80207811
ROS tf的规则
其中,
- 等号左边:turtle2在turtle1坐标系下的
姿态。 - 等号右边第一项:turtle1在世界坐标系world中的
姿态的逆。 - 等号右边第二项:turtle2在世界坐标系world中的
姿态。
- 等号左边:turtle2在turtle1坐标系下的
命令行中观测坐标变换数据的约定
$ rosrun tf tf_echo world turtle1
# 这将得到turtle1在世界坐标系world中的姿态。思考空间坐标变换的方法:基底
以下图为例(图像来自SVO官网wiki)。
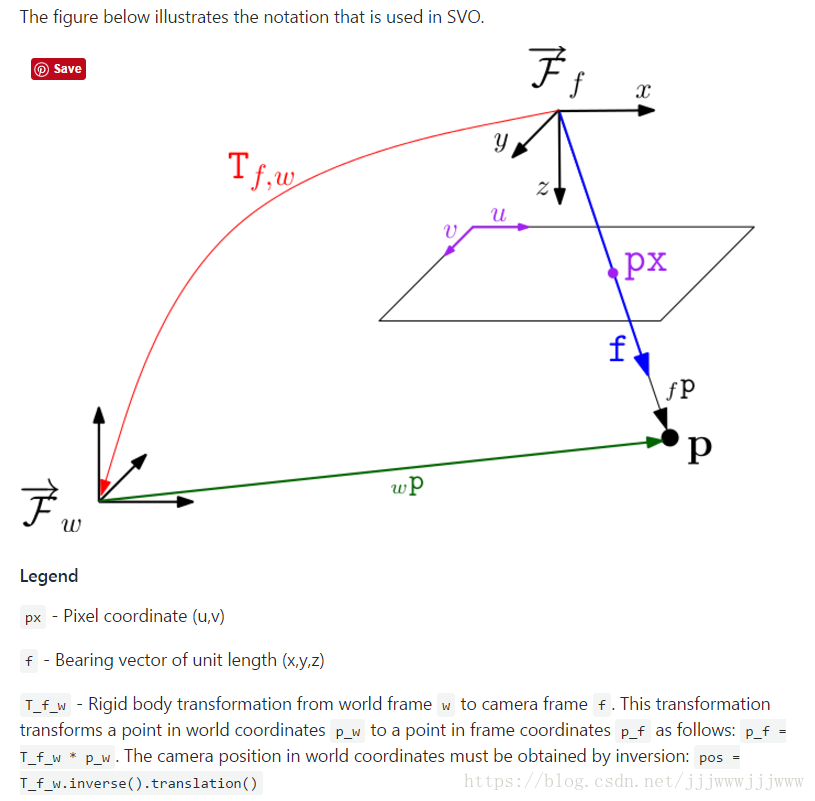
这里,假定相机坐标系
所在的向量空间的基底为
,世界坐标系
所在的向量空间的基底为
。则坐标变换的生成方式为:
此时,若 为空间某一点在世界坐标系 中的坐标, 为该点在相机坐标系 中对应的坐标,则有:
从而,
同理,
则相机原点在世界坐标系
中的坐标值(即通常说的相机的位置)是:
其中, 是齐次坐标 ,其值为零表示相机坐标系 的坐标原点,也即相机的位置, 。
是变换矩阵 的平移部分。