参考:维基百科
1、相似矩阵
两个
矩阵
与
为相似矩阵,当且仅当存在一个
的可逆矩阵
,使得:
被称为矩阵
与
之间的相似变换矩阵.
相似变换下的不变性质:
- 两者的
秩相等 - 两者的
行列式值相等 - 两者的
迹数相等 - 两者拥有同样的
特征值,尽管相应的特征向量一般不同
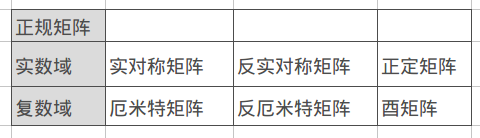
2、正规矩阵
满足下列条件的矩阵都属于正规矩阵
注意,正规矩阵不一定可逆,如反对称矩阵就不可逆
正规矩阵包括:
对角分解
任何一个矩阵一定和约当矩阵相似,即存在可逆矩阵
使得
,对于一个实对称矩阵,一定存在可逆矩阵
使得
,对这个结论进行推广,正规矩阵一定可以对角化,即存在酉矩阵
使得
其中,
的对角线为
的特征值.
设
是
阶正规矩阵,其特征值为
,则
- 是厄米特矩阵的充要条件是: 的特征值全是实数
- 是反厄米特矩阵的充要条件是: 的特征值为零或纯虚数
- 是酉矩阵的充要条件是: 的每个特征值 的模
埃尔米特矩阵/厄米特矩阵(Hermitian matrix)
埃尔米特矩阵中每一个第i行第j列的元素都与第j行第i列的元素的复共轭
埃尔米特矩阵主对角线上的元素都是实数的,其特征值也是实数。对于只包含实数元素的矩阵(实矩阵),如果它是对称阵,即所有元素关于主对角线对称,那么它也是埃尔米特矩阵。也就是说,实对称矩阵是埃尔米特矩阵的特例
实对称矩阵
反厄米特矩阵/反埃尔米特矩阵
反实对称矩阵/ 斜对称矩阵(skew-symmetric matrix)
行列式
- 斜对称矩阵的
主对角线元素必是0,所以其迹数为零 - 斜对称矩阵自身相乘的积是对称矩阵
- 任意矩阵 , 是斜对称矩阵
- 若
是斜对称矩阵,
是向量,
= 0,即
二次型为0
正交矩阵(orthogonal matrix)
正交矩阵是一个方块矩阵
,其元素为实数,而且行与列皆为正交的单位向量,使得该矩阵的转置矩阵为其逆矩阵:
正交矩阵的行列式值必定为+1或-1,因为:
下面是一些重要的性质:
- 作为一个线性映射(变换矩阵),正交矩阵保持距离不变,所以它是一个保距映射,具体例子为旋转与镜射
- 行列式值为
+1的正交矩阵,称为特殊正交矩阵,即我们常说的旋转矩阵 - 行列式值为
-1的正交矩阵,称为瑕旋转矩阵,瑕旋转就是旋转加上镜射。 - 所有 正交矩阵形成一个群 ,称为正交群。亦即,正交矩阵与正交矩阵的乘积也是一个正交矩阵。
- 所有特殊正交矩阵形成一个子群 ,称为特殊正交群。亦即,旋转矩阵与旋转矩阵的乘积也是一个旋转矩阵。
Cholesky分解
三角分解中的一种
如果
是正定的厄米特矩阵,则存在下三角矩阵
使得
在求解最小二乘
时,因为
是超定矩阵,所以先要转换成正定的厄米特矩阵才能使用Cholesky分解,即
.
- QR分解,分解成正交矩阵和一个上三角矩阵
2) LU分解,分解为一个下三角矩阵和一个上三角矩阵的乘积- 用于计算行列式,|A|=|L||R|
- 求解线性方程组,使用替代法求解
- 求逆矩阵
- Cholesky分解,指将一个正定的Hermite矩阵分解成一个下三角矩阵与其共轭转置之乘积
- 效率是LU的两倍
- 奇异值SVD分解,任何一个矩阵(不限方阵)都可以实现SVD分解
参考《矩阵分析》,整明白了奇异值分解,为什么A=UDV^T中的V每一列对应一个特征值的特征向量(P74) - 特征值EVD分解,