概述:
1)预处理是指处于最低抽象层次的图像上所进行的操作,这时处理的输入和输出都是亮度图像。
2)预处理并不会增加图像的信息量预处理有助于抑制与特殊的图像处理或分析任务无关的信息。因此预处理的目的是改善图像数据,抑制不需要的变形或者增强某些对于后续处理重要的图像特征。
图像预处理方法按照在计算新像素亮度时所使用的像素邻域的大小可以分为四类:
1)像素亮度变化
2)几何变换
3)局部邻域预处理
4)图像复原
(1)像素亮度变化
1)有两类像素亮度变换
亮度矫正
灰度级变换
2)亮度矫正在修改像素的亮度时要考虑该像素原来的亮度和其在图像中的位置
3)灰度级变换在修改像素的亮度时无须考虑其位置
4)常用的亮度变换有:
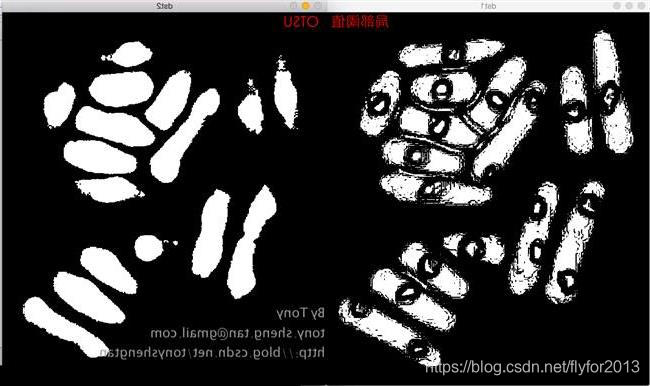
亮度阈值化
直方图均衡化
对数的灰度级变换
查找表变换
伪彩色变换
5)直方图均衡化目的是创建一幅在整个亮度范围内具有相同的亮度图像

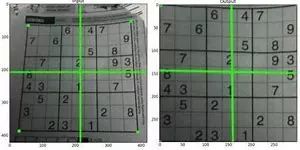
(2)几何变换
1)几何变换可以消除图像获取时所出现的几何变形
2)几何变换一般是由两个基本步骤组成:
像素坐标变换
亮度插值
3)像素坐标变换将输入图像像素映射到输出图像,常使用“仿射变换”和“双线性变化”
4)经过变换,输出点的坐标一般并不符合数字离散光栅;插值被用来确定输出像素的亮度。常使用“最近邻”、“线性”、“双三次”。
(3)局部预处理
1)局部预处理方法是使用输入图像中一个像素的小邻域来产生输出图像中新的亮度数值的方法。
2)预处理常见的有两组:“平滑”和“边缘检测”。
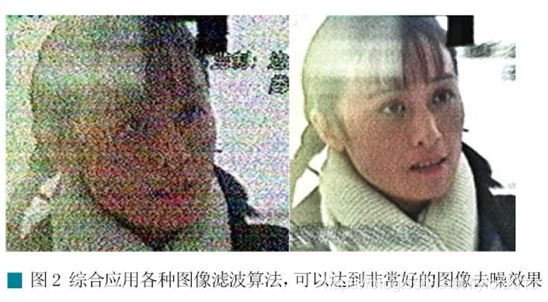
3)平滑的目的在于抑制噪声或其他小的波动,这等同于在傅里叶频域抑制高频部分,
4)基于直接平均的平滑方法会模糊边缘。改进的方法通过在一致性的局部区域内平均来减小模糊。
5)“中值”滤波是一种非线性操作,它用邻域中亮度的中值代替图像当前的点来减少模糊。
6)“梯度算子”确定“边缘”,边缘是亮度函数发生急剧变化的位置。它们的效果类似于在傅里叶频域抑制低频部分。
7)边缘是赋给单个像素的性质,它既有“幅值(强度)”又有“方向”。
8)多数梯度算子可以用“卷积掩膜”来表达,例子包括Roberts、Laplace、Prewitt、Sobel、Kirsch算子。
9)卷积边缘检测子的主要缺点是依赖尺度且对噪声敏感。选择某个最好的局部邻域算子尺度并不是那么容易决定的。
10)二阶导数“过零点”比小尺度的梯度检测子更稳定,可以用Laplace of Gaussians(LoG)或difference of Gaussians(DoG)来计算
11)Canny边缘检测算子对受白噪声影响的阶跃型边缘是最优的。最优性标准是基于如下要求:“检测”重要边缘、小的“定位”误差、“单边缘响应”。该检测子与一个对称2D高斯做卷积,再沿梯度方向微分;接着步骤包括“非最大边缘抑制”、“滞后阈值化处理”和“特征综合”。
12)在多光谱图像中也可以检测边缘
13)其他局部预处理运算包括“线条寻找”、“线条细化”、“线条补缺”以及“兴趣点检测”
14)一幅图像中诸如角点和最大稳定极值区域等结构包括更丰富的信息,检测边缘更为稳定。它们常用于图像匹配。
(4)图像复原
1)图像复原旨在利用有关退化性质知识来抑制退化。多数图像复原方法是基于整幅图像上的全局性“去卷积”的方法。
2)有三种典型的退化具有简单的函数形式:物体相对于摄像机作近似均速的运动、不当的镜头焦距、大气扰动。
3)“逆滤波”假设退化是由线性函数引起的。
4)“维纳滤波”给出了对未被噪声污染的原始图像的一个最小均方误差估计;一般而言,它是退化图像的非线性函数。
概述:
1)预处理是指处于最低抽象层次的图像上所进行的操作,这时处理的输入和输出都是亮度图像。
2)预处理并不会增加图像的信息量预处理有助于抑制与特殊的图像处理或分析任务无关的信息。因此预处理的目的是改善图像数据,抑制不需要的变形或者增强某些对于后续处理重要的图像特征。

欢迎关注和订阅AI算法与图像处理(AI_study)回复“图像处理”即可获取书籍资料
不定期更新和分享高质量的文章和学习资料,让我一起进步吧,fighting
