1. 图像二值化
1.1. 简单阈值或全局阈值
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE)
简单阈值当然是最简单,选取一个全局阈值,然后就把整幅图像分成了非黑即白的二值图像了。这个函数有四个参数,第一个原图像,第二个进行分类的阈值,第三个是高于(低于)阈值时赋予的新值,第四个是一个方法选择参数,常用的有:
• cv2.THRESH_BINARY(黑白二值)
• cv2.THRESH_BINARY_INV(黑白二值反转)
• cv2.THRESH_TRUNC (得到的图像为多像素值)
• cv2.THRESH_TOZERO
• cv2.THRESH_TOZERO_INV
1.2. 自适应阈值
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
binary = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY, 25, 10)
前面看到简单阈值是一种全局性的阈值,只需要规定一个阈值值,整个图像都和这个阈值比较。而自适应阈值可以看成一种局部性的阈值,通过规定一个区域大小,比较这个点与区域大小里面像素点的平均值(或者其他特征)的大小关系确定这个像素点是属于黑或者白(如果是二值情况)。使用的函数为:cv2.adaptiveThreshold()
该函数需要填6个参数:
• 第一个原始图像
• 第二个像素值上限
• 第三个自适应方法Adaptive Method:
— cv2.ADAPTIVE_THRESH_MEAN_C :领域内均值
—cv2.ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权 重为一个高斯窗口
• 第四个值的赋值方法:只有cv2.THRESH_BINARY 和cv2.THRESH_BINARY_INV
• 第五个Block size:规定领域大小(一个正方形的领域)
• 第六个常数C,阈值等于均值或者加权值减去这个常数(为0相当于阈值 就是求得领域内均值或者加权值)
这种方法理论上得到的效果更好,相当于在动态自适应的调整属于自己像素点的阈值,而不是整幅图像都用一个阈值。
2. 图像降噪
2.1. 均值滤波
cv2.blur(image, (3, 3))
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标像素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值
均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。
2.2. 高斯滤波
cv2.GaussianBlur(image, (3, 3), 0)
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。 通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
2.3. 中值滤波
cv2.medianBlur(image, 3)
中值滤波是一种典型的非线性滤波,是基于排序统计理论的一种能够有效抑制噪声的非线性信号处理技术,基本思想是用像素点邻域灰度值的中值来代替该像素点的灰度值,让周围的像素值接近真实的值从而消除孤立的噪声点。该方法在取出脉冲噪声、椒盐噪声的同时能保留图像的边缘细节。这些优良特性是线性滤波所不具备的。
2.4. 双边滤波
cv2.bilateralFilter(image, 5, 21, 21)
bilateral filter双边滤波器可以很好的边缘保护,即可以在去噪的同时,保护图像的边缘特性。双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的。
3. 图像增强
3.1. 灰度图像
获取灰度图像。
grayscaled = tf.image.rgb_to_grayscale(image)
3.2. 饱和图像
通过提供饱和度因子使图像饱和。
saturated = tf.image.adjust_saturation(image, 3)
3.3. 更改图像亮度
bright = tf.image.adjust_brightness(image, 0.4)
3.4. 基于直方图均衡化的图像增强
直方图均衡化是通过调整图像的灰阶分布,使得在0~255灰阶上的分布更加均衡,提高了图像的对比度,达到改善图像主观视觉效果的目的。对比度较低的图像适合使用直方图均衡化方法来增强图像细节
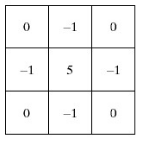
3.5. 基于拉普拉斯算子的图像增强
使用中心为5的8邻域拉普拉斯算子与图像卷积可以达到锐化增强图像的目的,拉普拉斯算子如下图所示:
3.6. 基于对数Log变换的图像增强
对数变换可以将图像的低灰度值部分扩展,显示出低灰度部分更多的细节,将其高灰度值部分压缩,减少高灰度值部分的细节,从而达到强调图像低灰度部分的目的。变换方法:

3.7. 基于伽马变换的图像增强
伽马变换主要用于图像的校正,将灰度过高或者灰度过低的图片进行修正,增强对比度。变换公式就是对原图像上每一个像素值做乘积运算:
4. 图像几何变化
4.1. 翻转图像
垂直或水平翻转图像。
flipped = tf.image.flip_left_right(image)
4.2. 旋转图像
将图像旋转90度
rotated = tf.image.rot90(image)
4.3. 中心裁剪图像
从中心裁剪图像到所需的图像部分。
cropped = tf.image.central_crop(image, central_fraction=0.5)
5. 图像插值
图像插值是在基于模型框架下,从低分辨率图像生成高分辨率图像的过程,用以恢复图像中所丢失的信息。图象插值方法有:最近邻插值,双线性插值,双平方插值,双立方插值以及其他高阶方法。
cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])
interpolation 选项 所用的插值方法:
INTER_NEAREST 最近邻插值
INTER_LINEAR 双线性插值(默认设置)
INTER_AREA 使用像素区域关系进行重采样。 它可能是图像抽取的首选方法,因为它会产生无云纹理的结果。 但是当图像缩放时,它类似于INTER_NEAREST方法。
INTER_CUBIC 4x4像素邻域的双三次插值
INTER_LANCZOS4 8x8像素邻域的Lanczos插值
5.1. 最邻插值算法
是最简单的一种插值算法,当图片放大时,缺少的像素通过直接使用与之最近原有颜色生成,也就是说照搬旁边的像素。这样做结果产生了明显可见的锯齿。
在待求象素的四邻象素中,将距离待求象素最近的邻灰度赋给待求象素。
5.2. 双线性插值算法
在数学上,双线性插值是有两个变量的插值函数的线形插值扩展,其核心思想是在两个方向分别进行一次线性插值。
双线性内插法的计算比最邻近点法复杂,计算量较大但没有灰度不连续的缺点,结果基本令人满意。它具有低通滤波性质,使高频分量受损,图像轮廓可能会有一点模糊。
5.3. 三次内插法
该方法利用三次多项式S(x)求逼近理论上最佳插值函数sin(x)/x, 其数学表达式为:
待求像素(x, y)的灰度值由其周围16个灰度值加权内插得到