参考:http://rosclub.cn/post-971.html
代码下载 https://github.com/felixendres/rgbdslam_v2
步骤1. 下载rgbdslam ros包解压到catkin_ws/src 下
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip unzip -q indigo.zip //解压
或者github 下载源码 进入catkin_ws/src目录
# cd ~/catkin_ws/src # git clone https://github.com/felixendres/rgbdslam_v2
步骤2.编译源码
cd ~/catkin_ws catkin_make
如果出现依赖报错,安装依赖 rosdep install rgbdslam命令
然后到 https://vision.in.tum.de/data/datasets/rgbd-dataset 地址下载数据bag
我下的数据包有
1.rgbd_dataset_freiburg1_360.bag
2.rgbd_dataset_freiburg2_coke.bag
3.rgbd_dataset_freiburg1_desk.bag
4.rgbd_dataset_freiburg2_pioneer_slam2.bag
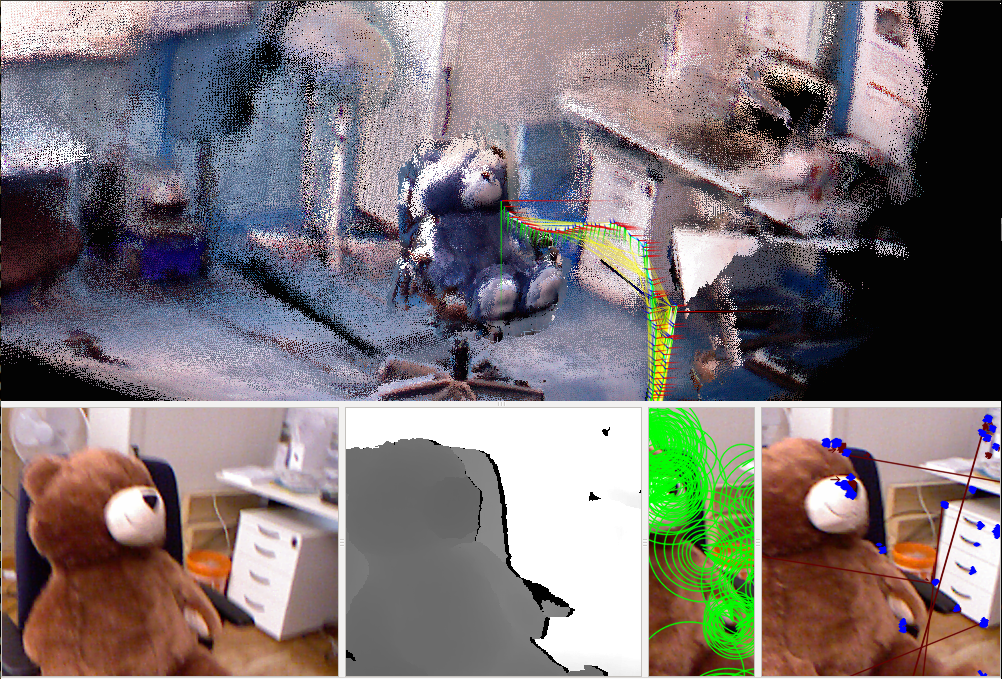
5.rgbd_dataset_freiburg1_teddy.bagrosbag play 这些数据包 默认发布的主题是/camera/rgb/image_color /camera/depth/image
所以这里要修改~/catkin_ws/src/rgbdslam/launch$ 目录下的 rgbdslam.launch文件内容
修改前
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth_registered/sw_registered/image_rect_raw"/>
修改后
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/>
<param name="config/topic_image_depth" value="/camera/depth/image"/>
然后在终端启动rgbdslam.launch
$ roslauch rgbdslam.launch
播放bag数据包
$ rosbag play rgbd_dataset_freiburg1_360.bag
效果图
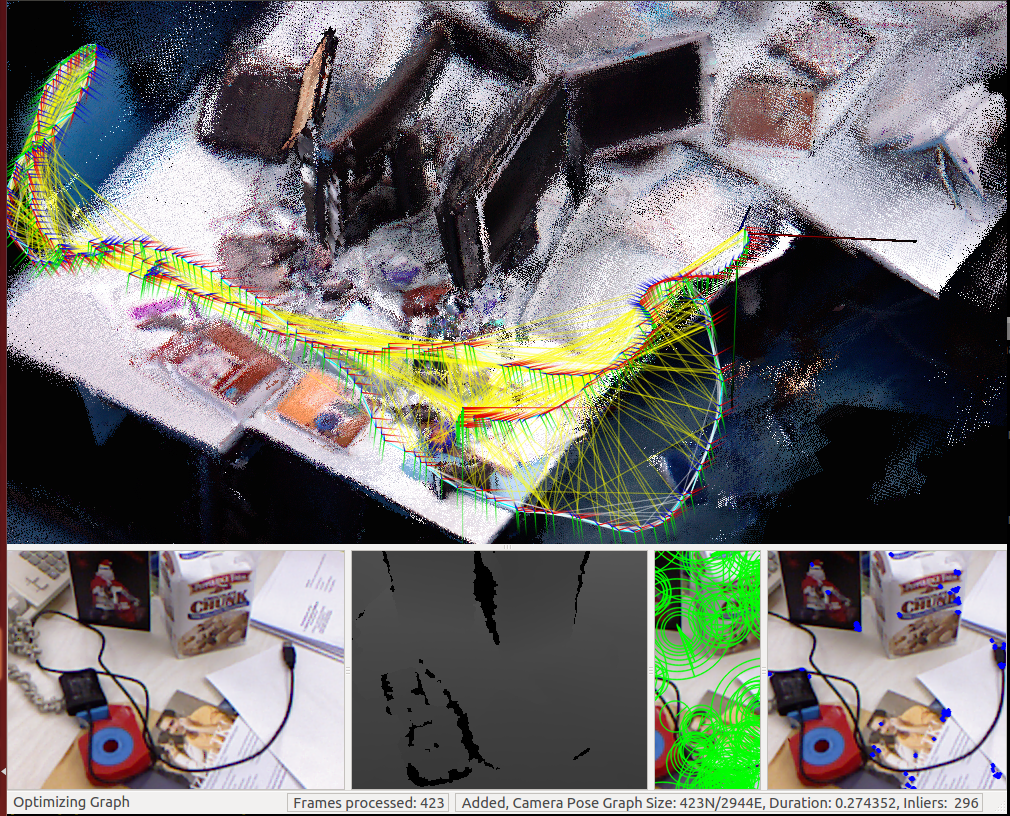
可以试试 rgbd_dataset_freiburg1_desk.bag数据包
$ rosbag play rgbd_dataset_freiburg1_desk.bag