FINDING THE position of a passive source based on measurements from an array of spatially separated sensors has been an important problem in radar, sonar, and global positioning systems, mobile communications, multimedia, and wireless sensor networks.
根据一系列空间分离传感器的测量结果找到无源信号源的位置一直是雷达,声纳和全球定位系统,移动通信,多媒体和无线传感器网络中的一个重要问题。
The time of arrival ( TOA ), time difference of arrival ( TDOA ), received signal strength ( RSS ), and direction of arrival ( DOA ) of the emitted signal are commonly used measurements for source localization.
到达时间(TOA),到达时间差(TDOA),接收信号强度(RSS)和发射信号的到达方向(DOA)是用于源定位的常用测量。
Basically, TOAs, TDOAs, and RSSs provide the distance information between the source and sensors, while DOAs are the source bearings relative to the receivers. However, finding the source position is not a trivial task because these measurements have nonlinear relationships with the source position.
基本上,TOA,TDOA和RSS提供源和传感器之间的距离信息,而DOA是相对于接收器的源方位。 然而,找到源位置并不是一项简单的任务,因为这些测量与源位置具有非线性关系。
This chapter introduces two categories of positioning algorithms based on TOA, TDOA, RSS, and DOA measurements. The first class works on the nonlinear equations directly obtained from the nonlinear relationships between the source and measurements. Corresponding examples, namely, nonlinear least squares ( NLS ) and maximum likelihood ( ML ) estimators, will be presented.
本章介绍了两类基于TOA,TDOA,RSS和DOA测量的定位算法。 第一类研究直接从源和测量之间的非线性关系获得的非线性方程。 将呈现相应的示例,即非线性最小二乘(NLS)和最大似然(ML)估计。
The second category attempts to convert the equations to be linear, and we will discuss the linear least squares ( LLS ), weighted linear least squares ( WLLS ), and subspace approaches. In addition, under sufficiently small error conditions, we develop the mean and variance expressions for any positioning method, which can be formulated as an unconstrained optimization problem.
第二类尝试将方程转换为线性,我们将讨论线性最小二乘(LLS),加权线性最小二乘(WLLS)和子空间方法。 此外,在足够小的误差条件下,我们为任何定位方法开发均值和方差表达式,这可以表示为无约束优化问题。
Assuming that the disturbances in the measurements are zero - mean Gaussian distributed, the Cramér – Rao lower bound ( CRLB ), which gives a lower bound on the variance attainable by any unbiased location estimator using the same data, will also be provided.
假设测量中的干扰是零 - 均值高斯分布,则还将提供Cramér-Rao下界(CRLB),其给出了使用相同数据的任何无偏位置估计器可获得的方差的下界。
The intended learning outcomes for this chapter include (1) understanding the positioning algorithm development using TOA, TDOA, RSS, and DOA measurements; and (2) understanding the performance measures for position estimation.
本章的预期学习成果包括:(1)使用TOA,TDOA,RSS和DOA测量来理解定位算法的开发; (2)了解位置估计的绩效指标。
INTRODUCTION
The position of a target of interest can be determined by utilizing its emitted signal measured at an array of spatially separated receivers with a priori known locations.
感兴趣目标的位置可以通过利用其在空间上分离的接收器阵列处测量的具有先验已知位置的发射信号来确定。
In fact, source localization has been one of the central problems in many fields such as radar, sonar [1] , telecommunications [2] , mobile communications [3 – 5] , wireless sensor networks [6, 7] , as well as human – computer interaction [8] . For example, the position of an active talker can be tracked with the use of a microphone array in applications such as video conferencing, automatic scene analysis, and security monitoring.
事实上,源定位已经成为许多领域的核心问题之一,如雷达,声纳[1],电信[2],移动通信[3 - 5],无线传感器网络[6,7],以及人类 - 计算机互动[8]。 例如,可以在诸如视频会议,自动场景分析和安全监视之类的应用中使用麦克风阵列来跟踪活动讲话者的位置。
On the other hand, mobile terminal localization has been receiving considerable attention, especially after the Federal Communications Commission ( FCC ) in the United States has adopted rules to improve the 911 services by mandating the accuracy of locating an emergency caller to be within a specified range, even for a wireless phone user [9] .
另一方面, 移动终端的本地化受到了相当大的关注, 尤其是在美国联邦通信委员会 (FCC) 通过了规则来改进911服务的时候, 强制定位一个紧急呼叫者在指定范围内, 即使对于无线电话用户 [9]。
Apart from emergency assistance, mobile position information is also the key enabler for a large number of innovative applications such as personal localization and monitoring, fleet management, asset tracking, travel services, location - based advertising, and billing. More recently, technological advances in wireless communications and microsystem integration have enabled the development of small, inexpensive, low - power sensor nodes, which are able to collect surrounding data, perform small - scale computations, and communicate among their neighbors.
除紧急援助外,移动位置信息也是大量创新应用的关键推动因素,如个人本地化和监控,车队管理,资产跟踪,旅行服务,基于位置的广告和计费。 最近,无线通信和微系统集成的技术进步使得能够开发小型,廉价,低功率的传感器节点,这些节点能够收集周围数据,执行小规模计算以及在其邻居之间进行通信。
These wirelessly connected nodes, when working in a collaborative manner, have great potential in numerous remote monitoring and control applications, such as habitat monitoring, health care, building automation, battlefield surveillance, as well as environment observation and forecasting. Because sensor nodes are often arbitrarily placed with their positions being unknown, node positioning is a fundamental and crucial issue for the sensor network operation and management.
这些无线连接节点在以协作方式工作时,在许多远程监控和控制应用中具有巨大潜力,例如栖息地监控,医疗保健,楼宇自动化,战场监控以及环境观测和预测。 由于传感器节点通常被任意放置,其位置未知,因此节点定位是传感器网络操作和管理的基本且关键的问题。
TOA, TDOA, RSS, and DOA of the emitted signal are commonly used measurements [10] for source localization. Basically, TOAs, TDOAs and RSSs provide the distance information between the source and sensors, while DOAs are the source bearings relative to the receivers. However, finding the source position is not a trivial task because these measurements have nonlinear relationships with the source position.
Given the TOA, TDOA, RSS, or DOA information, the main focus in this chapter is on positioning algorithm development and analysis. Although two dimensional (2 - D) source localization is considered, it is straightforward to extend the study to three dimensional space.
We assume that there are no outliers in the measurements in order to achieve reliable location estimation; that is, the errors due to shadowing and multipath propagation in the RSSs are sufficiently small. On the other hand, line - of - sight ( LOS ) transmission [10] is assumed, so that there is a direct path between the source and each receiver in estimating the TOAs, TDOAs, and DOAs. It is worthy to point out that non - line - of - sight ( NLOS ) occurs when there are obstructions between the source and receivers, which can cause large positive biases in the corresponding distance information. For position estimation in the presence of NLOS propagation, the interested reader is referred to Part IV of this book.
我们假设测量中没有异常值以实现可靠的位置估计; 也就是说,由RSS中的阴影和多径传播引起的误差足够小。 另一方面,假设视距(LOS)传输[10],因此在估计TOA,TDOA和DOA时,源和每个接收器之间存在直接路径。 值得指出的是,当源和接收器之间存在障碍物时会发生非视距(NLOS),这会在相应的距离信息中产生较大的正偏差。 对于存在NLOS传播的位置估计,感兴趣的读者可参考本书的第IV部分。
The rest of this chapter is organized as follows. The measurement models of TOA, TDOA, RSS, and DOA and their positioning principles are fi rst presented in Section 2.2 . Positioning algorithms based on the location - bearing information, which are classifi ed as nonlinear and linear approaches, are developed in Section 2.3 .
本章的其余部分安排如下。 TOA,TDOA,RSS和DOA的测量模型及其定位原则首先在2.2节中介绍。 第2.3节开发了基于位置承载信息的定位算法,这些算法被分类为非线性和线性方法。
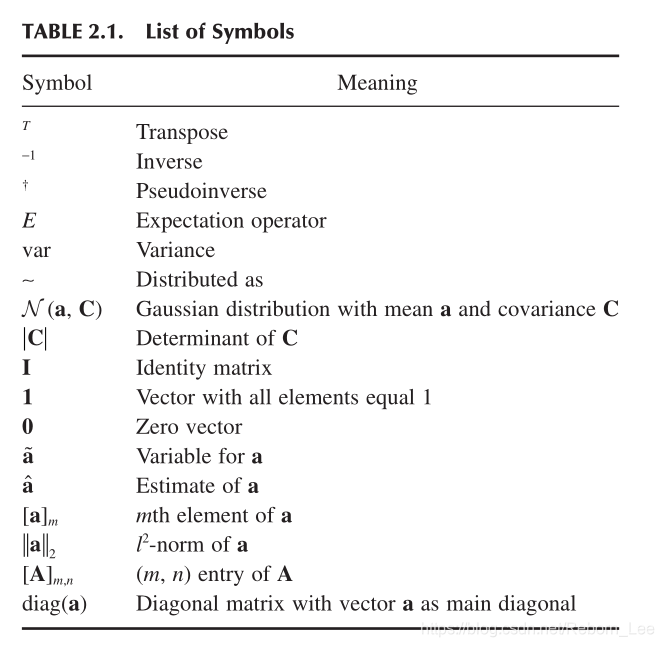
The first category deals with the nonlinear equations directly constructed from the TOA, TDOA, RSS, or DOA measurements, which includes the NLS and ML estimators. On the other hand, the second approach converts the nonlinear equations to be linear, and LLS, WLLS, and subspace methods will be presented. Note that the WLLS estimator is, in fact, a generalized version of the LLS technique, where a weighting function is involved. Section 2.4 contributes to the algorithm analysis, and two important performance measures, namely, mean and variance, will be examined. Furthermore, the computation of CRLB, which is a lower bound on the variance attainable by any unbiased location estimator, will be presented. Finally, concluding remarks are given in Section 2.5 . Symbols that are used in this chapter are listed in Table 2.1 .
第一类涉及直接由TOA,TDOA,RSS或DOA测量构建的非线性方程,其中包括NLS和ML估计。 另一方面,第二种方法将非线性方程转换为线性方程,并且将呈现LLS,WLLS和子空间方法。 注意,WLLS估计器实际上是LLS技术的通用版本,其中涉及加权函数。 第2.4节有助于算法分析,并将检查两个重要的性能指标,即均值和方差。 此外,将呈现CRLB的计算,CRLB是任何无偏位置估计器可获得的方差的下限。 最后,第2.5节给出了结论性意见。 表2.1列出了本章中使用的符号。