方式一 单机机器人
1 在设计器上直接推送就送到了 ueba 中的push 文件中
2 也可以直接写好的流程 复制到 这个文件中
方式二 服务端的方式
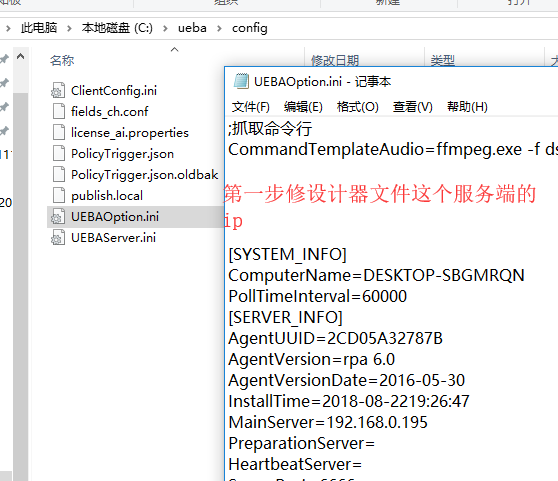
1 修改 ueba/config/UEBAOption.int 中的 MainServer 为控制器的ip
2 从设计器到处文件
3 从服务端 机器人-流程管理-右边的+ 添加导出那个流程

3 可以点击机器人同步 及时就同步了 执行后下载的文件就会在roboot文件夹中
方式一 单机机器人
1 在设计器上直接推送就送到了 ueba 中的push 文件中
2 也可以直接写好的流程 复制到 这个文件中
方式二 服务端的方式
1 修改 ueba/config/UEBAOption.int 中的 MainServer 为控制器的ip
2 从设计器到处文件
3 从服务端 机器人-流程管理-右边的+ 添加导出那个流程
3 可以点击机器人同步 及时就同步了 执行后下载的文件就会在roboot文件夹中