1 参考书籍《零死角玩转STM32-F429》
2 编程过程
首先我们简单了解下 MDK 的编译过程,它与其它编译器的工作过程是类似的,该过程见图 51-1。
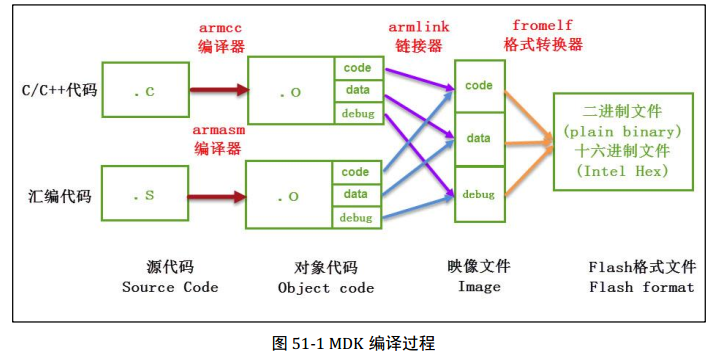
(1) 编译, MDK 软件使用的编译器是 armcc 和 armasm,它们根据每个 c/c++和汇编源文件编译成对应的以“.o”为后缀名的对象文件(Object Code,也称目标文件),其内容主要是从源文件编译得到的机器码,包含了代码、数据以及调试使用的信息;
(2) 链接,链接器 armlink 把各个.o 文件及库文件链接成一个映像文件“.axf”或“.elf”:
(3) 格式转换,一般来说 Windows 或 Linux 系统使用链接器直接生成可执行映像文件 elf后,内核根据该文件的信息加载后,就可以运行程序了,但在单片机平台上,需要把该文件的内容加载到芯片上,所以还需要对链接器生成的 elf 映像文件利用格式转换器fromelf 转换成“.bin”或“.hex”文件,交给下载器下载到芯片的 FLASH 或 ROM 中
3 程序的组成,存储和运行
根据每一个程序的编译提示,如下图

在工程的编译提示输出信息中有一个语句“Program Size: Code=xx RO-data=xx RWdata=xx ZI-data=xx”,它说明了程序各个域的大小,编译后,应用程序中所有具有同一性质的数据(包括代码)被归到一个域,程序在存储或运行的时候,不同的域会呈现不同的状态,这些域的意义如下:
Code:即代码域,它指的是编译器生成的机器指令,这些内容被存储到 ROM 区。
RO-data: Read Only data,即只读数据域,它指程序中用到的只读数据,这些数据被存储在 ROM 区,因而程序不能修改其内容。例如 C 语言中 const 关键字定义的变量就是典型的 RO-data。
RW-data: Read Write data,即可读写数据域,它指初始化为“非 0 值”的可读写数据,程序刚运行时,这些数据具有非 0 的初始值,且运行的时候它们会常驻在RAM 区,因而应用程序可以修改其内容。例如 C 语言中使用定义的全局变量,且定义时赋予“非 0 值”给该变量进行初始化。
ZI-data: Zero Initialie data,即 0 初始化数据,它指初始化为“0 值”的可读写数据域,它与 RW-data 的区别是程序刚运行时这些数据初始值全都为 0,而后续运行过程与 RW-data 的性质一样,它们也常驻在 RAM 区,因而应用程序可以更改其内容。例如 C 语言中使用定义的全局变量,且定义时赋予“0 值”给该变量进行初始化(若定义该变量时没有赋予初始值,编译器会把它当 ZI-data 来对待,初始化为 0);
ZI-data 的栈空间(Stack)及堆空间(Heap):在 C 语言中,函数内部定义的局部变量属于栈空间,进入函数的时候从向栈空间申请内存给局部变量,退出时释放局部变量,归还内存空间。而使用 malloc 动态分配的变量属于堆空间。在程序中的栈空间和堆空间都是属于 ZI-data 区域的,这些空间都会被初始值化为 0 值。编译器给出的 ZI-data 占用的空间值中包含了堆栈的大小(经实际测试,若程序中完全没有使用 malloc 动态申请堆空间,编译器会优化,不把堆空间计算在内)。
程序组件所属的区域
| 机器代码指令 | Code |
| 常量 | RO-data |
| 初值非0的全局变量 | RW-datra |
| 初值为0的全局变量 | ZI-data |
| 局部变量 | ZI-data栈空间 |
| 使用malloc动态分配的空间 | ZI-data堆空间 |
4 程序的存储与运行
RW-data 和 ZI-data 它们仅仅是初始值不一样而已,为什么编译器非要把它们区分开?这就涉及到程序的存储状态了,应用程序具有静止状态和运行状态。静止态的程序被存储在非易失存储器中,如 STM32 的内部 FLASH,因而系统掉电后也能正常保存。但是当程序在运行状态的时候,程序常常需要修改一些暂存数据,由于运行速度的要求,这些数据往往存放在内存中(RAM),掉电后这些数据会丢失。因此,程序在静止与运行的时候它在存储器中的表现是不一样的。
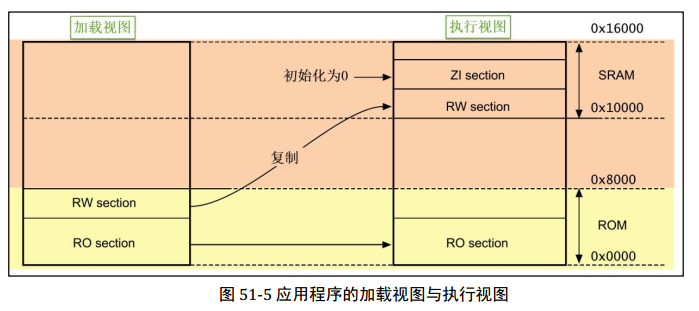
图中的左侧是应用程序的存储状态,右侧是运行状态,而上方是 RAM 存储器区域,下方是 ROM 存储器区域。程序在存储状态时, RO 节(RO section)及 RW 节都被保存在 ROM 区。当程序开始运行时,内核直接从 ROM 中读取代码,并且在执行主体代码前,会先执行一段加载代码,它把 RW 节数据从 ROM 复制到 RAM, 并且在 RAM 加入 ZI 节, ZI 节的数据都被初始化为
0。加载完后 RAM 区准备完毕,正式开始执行主体程序。编译生成的 RW-data 的数据属于图中的 RW 节, ZI-data 的数据属于图中的 ZI 节。是否需要掉电保存,这就是把 RW-data 与 ZI-data 区别开来的原因,因为在 RAM 创建数据的时候,默认值为 0,但如果有的数据要求初值非 0,那就需要使用 ROM 记录该初始值,运行时再复制到 RAM。
STM32 的 RO 区域不需要加载到 SRAM,内核直接从 FLASH 读取指令运行。计算机系统的应用程序运行过程很类似,不过计算机系统的程序在存储状态时位于硬盘,执行的时候甚至会把上述的 RO 区域(代码、只读数据)加载到内存,加快运行速度,还有虚拟内存管理单元(MMU)辅助加载数据,使得可以运行比物理内存还大的应用程序。而 STM32 没有 MMU,所以无法支持 Linux 和 Windows 系统。
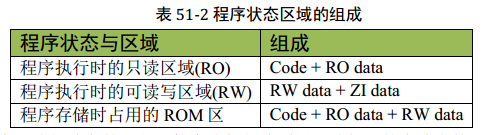
当程序存储到 STM32 芯片的内部 FLASH 时(即 ROM 区),它占用的空间是 Code、RO-data 及 RW-data 的总和,所以如果这些内容比 STM32 芯片的 FLASH 空间大,程序就无法被正常保存了。当程序在执行的时候,需要占用内部 SRAM 空间(即 RAM 区),占用的空间包括 RW-data 和 ZI-data。应用程序在各个状态时各区域的组成见表 。
在 MDK 中,我们建立的工程一般会选择芯片型号,选择后就有确定的 FLASH 及SRAM 大小,若代码超出了芯片的存储器的极限,编译器会提示错误,这时就需要裁剪程序了,裁剪时可针对超出的区域来优化。
5 后记
STM32F1系列因为没有MMU,所以不能跑操作系统。但是比如三星的S3C64310,在其数据手册上可以看到这么一句话:It also includes a full MMU to handle virtual memory management. 这说明S3C6410是具备MMU的,可以管理虚拟内存。