官网:
https://pybullet.org/wordpress/
Home of Bullet and PyBullet:
physics simulation for games, visual effects, robotics and reinforcement learning.
源码下载:
https://github.com/bulletphysics/bullet3
使用:
README.md 中已描述:
Windows
Click on build_visual_studio_vr_pybullet_double.bat and open build3/vs2010/0MySolution.sln
When asked, convert the projects to a newer version of Visual Studio.
If you installed Python in the C:\ root directory, the batch file should find it automatically.
Otherwise, edit this batch file to choose where Python include/lib directories are located.
用VS2015打开也可以, 然后编译运行. 没太多可述说的
/*
Bullet Continuous Collision Detection and Physics Library
Copyright (c) 2003-2007 Erwin Coumans http://continuousphysics.com/Bullet/
This software is provided 'as-is', without any express or implied warranty.
In no event will the authors be held liable for any damages arising from the use of this software.
Permission is granted to anyone to use this software for any purpose,
including commercial applications, and to alter it and redistribute it freely,
subject to the following restrictions:
1. The origin of this software must not be misrepresented; you must not claim that you wrote the original software. If you use this software in a product, an acknowledgment in the product documentation would be appreciated but is not required.
2. Altered source versions must be plainly marked as such, and must not be misrepresented as being the original software.
3. This notice may not be removed or altered from any source distribution.
*/
///-----includes_start-----
#include "btBulletDynamicsCommon.h"
#include <stdio.h>
/// This is a Hello World program for running a basic Bullet physics simulation
// Bullet模拟刚体动画的一般流程为:
// 初始化场景数据->设置场景的重力等参数->创建边界碰撞体->创建碰撞体->迭代模拟场景数据(计算一帧并输出数据)
int main(int argc, char** argv)
{
///-----includes_end-----
///-----initialization_start-----
// 创建碰撞配置对象以及碰撞调度器对象,使我们可以再各个阶段尝试不同的算法组合,目的是使用不同的算法和测试相同的碰撞
// 碰撞配置
///collision configuration contains default setup for memory, collision setup. Advanced users can create their own configuration.
btDefaultCollisionConfiguration* collisionConfiguration = new btDefaultCollisionConfiguration();
// 碰撞调度
///use the default collision dispatcher. For parallel processing you can use a diffent dispatcher (see Extras/BulletMultiThreaded)
btCollisionDispatcher* dispatcher = new btCollisionDispatcher(collisionConfiguration);
// btDbvtBroadphase用来执行快速碰撞检测 目的是尽量的剔除没有相互作用的对象对
///btDbvtBroadphase is a good general purpose broadphase. You can also try out btAxis3Sweep.
btBroadphaseInterface* overlappingPairCache = new btDbvtBroadphase();
// 实际上的物理模拟器
// 创建解算器,用于求解约束方程。得到物体在重力等作用下的最终位置的
///the default constraint solver. For parallel processing you can use a different solver (see Extras/BulletMultiThreaded)
btSequentialImpulseConstraintSolver* solver = new btSequentialImpulseConstraintSolver;
// 独立场景动态世界
btDiscreteDynamicsWorld* dynamicsWorld = new btDiscreteDynamicsWorld(
dispatcher, overlappingPairCache, solver, collisionConfiguration);
dynamicsWorld->setGravity(btVector3(0, -10, 0)); // 设置重力加速度 Y向下
///-----initialization_end-----
//keep track of the shapes, we release memory at exit.
//make sure to re-use collision shapes among rigid bodies whenever possible!
btAlignedObjectArray<btCollisionShape*> collisionShapes;
///create a few basic rigid bodies
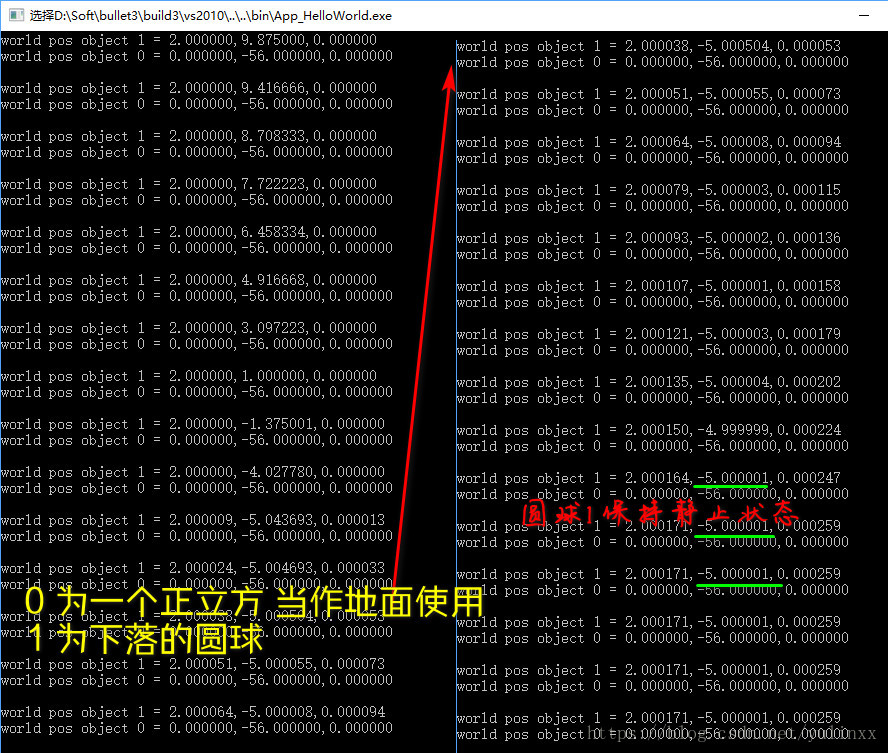
//创建一个地面,并加入到场景世界中
//the ground is a cube of side 100 at position y = -56.
//the sphere will hit it at y = -6, with center at -5
{
btCollisionShape* groundShape = new btBoxShape(btVector3(btScalar(50.), btScalar(50.), btScalar(50.))); // 长方体
collisionShapes.push_back(groundShape);
btTransform groundTransform;
groundTransform.setIdentity();
groundTransform.setOrigin(btVector3(0, -56, 0)); // 设置原点位置
btScalar mass(0.); // 质量
//rigidbody is dynamic if and only if mass is non zero, otherwise static
bool isDynamic = (mass != 0.f);
btVector3 localInertia(0, 0, 0); // 惯性
if (isDynamic)
groundShape->calculateLocalInertia(mass, localInertia); //通过质量,这个函数计算出运动物体的惯性
// 运动状态
//using motionstate is optional, it provides interpolation capabilities, and only synchronizes 'active' objects
btDefaultMotionState* myMotionState = new btDefaultMotionState(groundTransform);
// 刚体构造信息
btRigidBody::btRigidBodyConstructionInfo rbInfo(mass, myMotionState, groundShape, localInertia);
// 刚体
btRigidBody* body = new btRigidBody(rbInfo);
// 将刚体添加至动态世界中
//add the body to the dynamics world
dynamicsWorld->addRigidBody(body);
}
{
//创建一个球体,并加入到场景世界中
//create a dynamic rigidbody
//btCollisionShape* colShape = new btBoxShape(btVector3(1,1,1));
btCollisionShape* colShape = new btSphereShape(btScalar(1.)); // 球体 半径为1
collisionShapes.push_back(colShape);
/// Create Dynamic Objects
btTransform startTransform;
startTransform.setIdentity();
startTransform.setOrigin(btVector3(2, 10, 0));
btScalar mass(1.f); // 质量
//rigidbody is dynamic if and only if mass is non zero, otherwise static
bool isDynamic = (mass != 0.f);
btVector3 localInertia(0, 0, 0); // 惯性
if (isDynamic)
colShape->calculateLocalInertia(mass, localInertia); //通过质量,这个函数计算出运动物体的惯性
//using motionstate is recommended, it provides interpolation capabilities, and only synchronizes 'active' objects
btDefaultMotionState* myMotionState = new btDefaultMotionState(startTransform);
btRigidBody::btRigidBodyConstructionInfo rbInfo(mass, myMotionState, colShape, localInertia);
btRigidBody* body = new btRigidBody(rbInfo);
dynamicsWorld->addRigidBody(body);
}
/// Do some simulation
int i = 0;
// 步进模拟
///-----stepsimulation_start-----
for (i = 0; i < 150; i++)
{
dynamicsWorld->stepSimulation(1.f / 5.f, 10); // 模拟运动 每次进行物理模拟运算的时间间隔 每次能响应的最大step数
//print positions of all objects
for (int j = dynamicsWorld->getNumCollisionObjects() - 1; j >= 0; j--)
{
btCollisionObject* obj = dynamicsWorld->getCollisionObjectArray()[j];
btRigidBody* body = btRigidBody::upcast(obj);
btTransform trans;
if (body && body->getMotionState())
{
body->getMotionState()->getWorldTransform(trans);
}
else
{
trans = obj->getWorldTransform();
}
printf("world pos object %d = %f,%f,%f\n", j,
float(trans.getOrigin().getX()), float(trans.getOrigin().getY()), float(trans.getOrigin().getZ()));
}
printf(" \n");
}
///-----stepsimulation_end-----
//cleanup in the reverse order of creation/initialization
///-----cleanup_start-----
//清理动态世界里的刚体
//remove the rigidbodies from the dynamics world and delete them
for (i = dynamicsWorld->getNumCollisionObjects() - 1; i >= 0; i--)
{
btCollisionObject* obj = dynamicsWorld->getCollisionObjectArray()[i];
btRigidBody* body = btRigidBody::upcast(obj);
if (body && body->getMotionState())
{
delete body->getMotionState();
}
dynamicsWorld->removeCollisionObject(obj);
delete obj;
}
//清理碰撞形状
//delete collision shapes
for (int j = 0; j < collisionShapes.size(); j++)
{
btCollisionShape* shape = collisionShapes[j];
collisionShapes[j] = 0;
delete shape;
}
//清理动态世界
//delete dynamics world
delete dynamicsWorld;
//清理求解器
//delete solver
delete solver;
//清理粗测阶段
//delete broadphase
delete overlappingPairCache;
//清理调度
//delete dispatcher
delete dispatcher;
delete collisionConfiguration;
//next line is optional: it will be cleared by the destructor when the array goes out of scope
collisionShapes.clear();
}