1、成像
分析一张图像之前,我们需要弄清一张图像是如何形成的。图像是如何在一个光学成像系统中产生的呢?这就涉及两个问题:
- 场景中各点到图像上各点的对应关系
- 什么决定了图像上各点的亮度
透视投影
透视投影模型是最常见的模型,如下图所示,E点是一个小孔,可视为相机的小孔,人的瞳孔等等。z轴又称为光轴,即“从小孔到像平面的垂直线”
对于相机来说,我们最直观的透视投影是这样的(加上一个像平面):
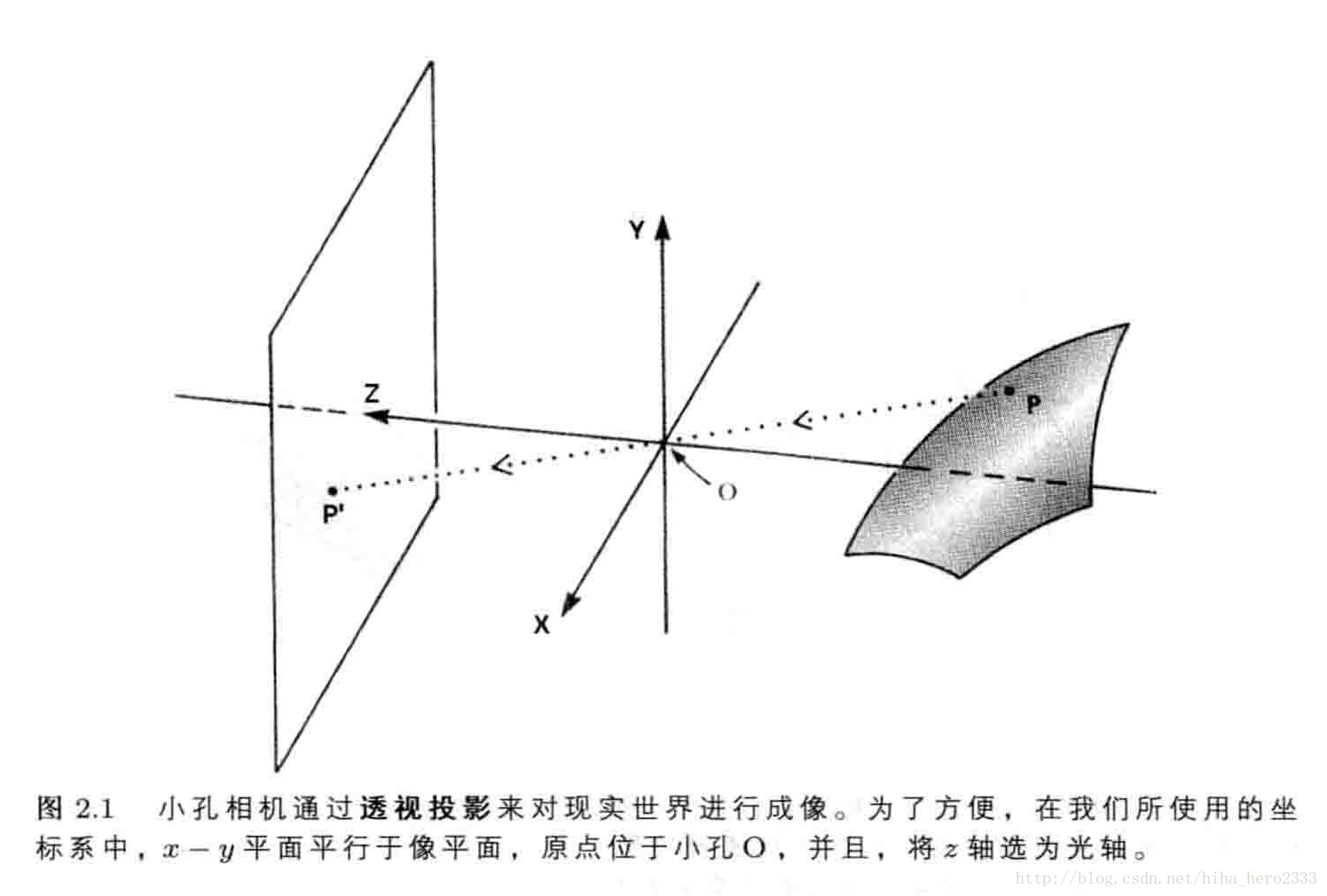
左边为像平面,右边曲面的是物体表面。
为了研究物体上各点到图像上的位置对应关系,令小孔O到物体表面某点的向量为
, 那么由光路由直线传播得,其对应像点的向量
.这里默认用列向量表示。f为像平面到小孔所在的XOY平面的距离,是个常数。
设
与光轴
的夹角为
,由几何关系可得:
写成分量的形式(实际上就是相似三角形另外两边相比)
正射投影
假设物体是平面是平面的,平行于像平面。由此定义放大率m为:像平面上两点的距离与对应的物体平面两点距离的比值,即:
除了显微镜成像以外,m < 1. 可见放大率与物体到小孔所在平面的距离有关.
场景深度范围:场景中可见物体表面所形成的曲面到相机的平均距离. 当场景深度的范围相对于曲面到小孔所在平面的平均距离来说很小的时候,我们可以认为放大率是不变的, 此时便有投影方程:
这样的模型就是正射投影模型.
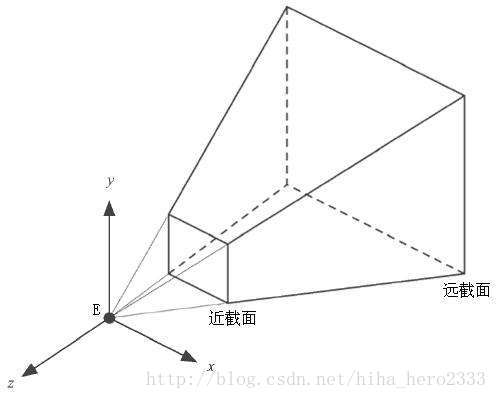
在被成像的场景之中,每个点都对应了一个方向,所有的方向合在一起张成了一个圆锥,这个圆锥的顶角称为”视野”.简单的来说,从焦距透过小孔能看到的最大范围角就是视野, 视野越大,焦距必然越小(广角镜); 焦距越小,视野必然越大(望远镜).
亮度
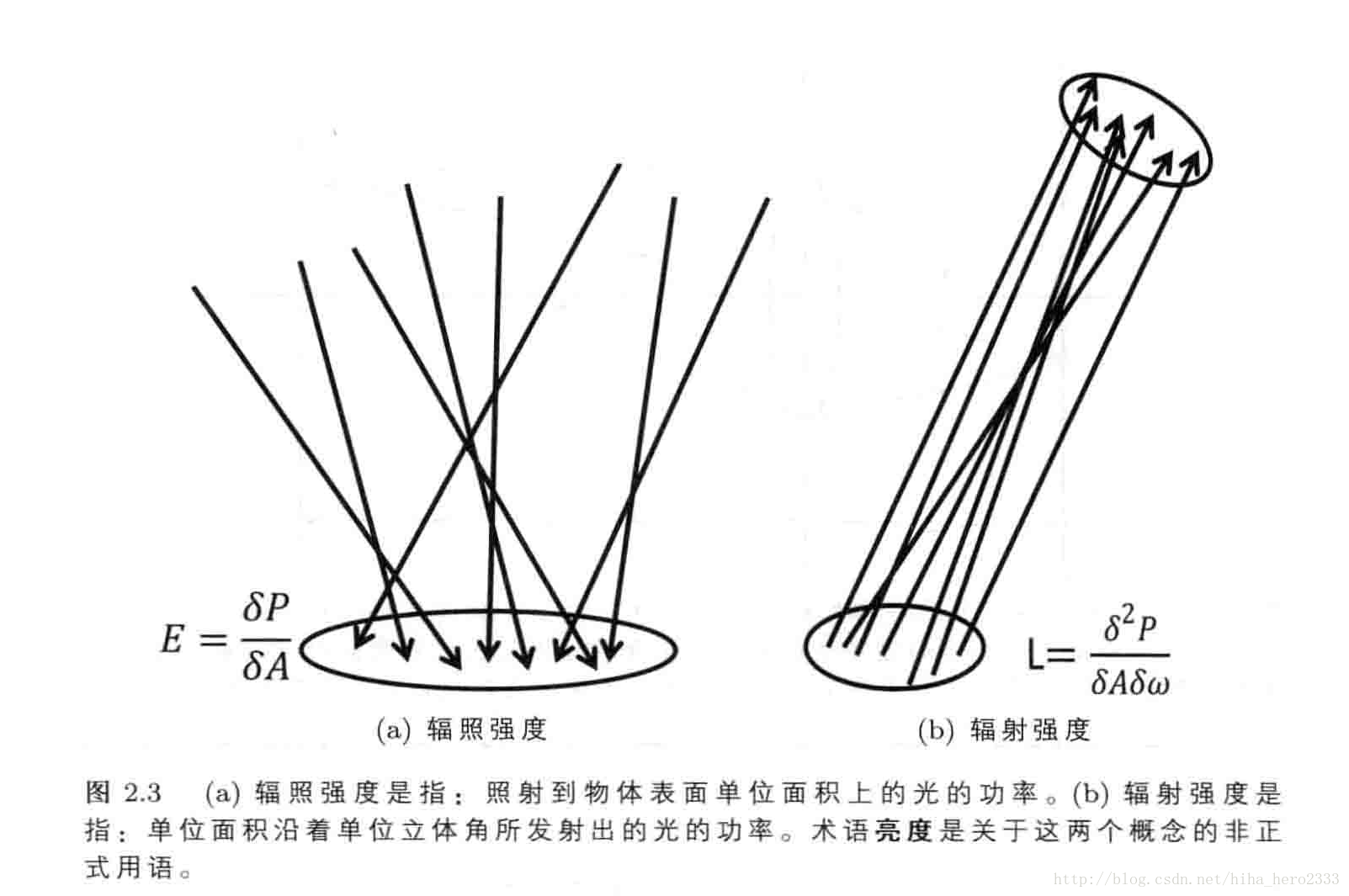
图像中的某一点的亮度由什么决定呢? 我们定义“辐照强度”来形容图像亮度. 辐照强度就是: 照射到某一表面的辐射能在单位面积上的功率. 单位是:
然而在场景中, 位于成像系统前物体表面不同的点亮度不同.我们定义辐射强度来形容场景亮度.辐射强度是指:从物体表面单位透视面积发出的, 射到单位立体角中的功率.单位是
透镜
理想透镜具有两个性质:
- 投影方式和小孔成像模型相同
- 将一定数量的光线汇聚到一起.
理想透镜具有一个缺点,就是只能用来汇聚透镜前
处的点发出的光, 由透镜公式可知:
知道了像平面到透镜的距离,以及透镜的焦距,我们能观测的距离也就确定了.如果场景中点和透镜的垂直距离不等于-z,那么它在像平面的成像就是一块圆斑.
成像域的深度是指:物体能够被聚焦得”足够好”的距离范围.”足够好”是指模糊光斑的直径小于成像仪器的分辨率.成像域的深度依赖于传感器.同时,透镜直径越大,成像域的深度越小.
焦距是指: 从无穷远处的物体发出的光(平行光)会被透镜汇聚成一点,该点与透镜之间的距离称为焦距。
图像检测
几乎所有的图像传感器的工作原理都依赖于:光子击打某种特殊材料时候产生的“电子/空穴”对。这是生物视觉和摄影的基本过程。
但是:
- 并不是所有入射光子都会产生电子/空穴对。
并不是所有的电子都能进入检测电路。电子流和入射光子流的比值称为量子效率,记为 。 量子效率依赖于入射光子的能量,还依赖于设备材料,仪器收集自由电子的方式等等。
感知颜色
仪器的灵敏度与入射光的波长有关,具有很大能量的光子会直接进入材料,而能量太小的光子可能会在到达材料之前被拦截。每种材料都有属于自身的、随着光的波长而变化的量子效率特征。
使用不同光敏材料做成的图像传感器,得到的图像也不同,因为传感器的光谱灵敏度不同。使用相同的感光材料,在相机上放上滤光镜就会得到不同灰度的图像。
人类视觉系统使用的传感器为“锥状体”、机器视觉系统使用红、绿、蓝(RGB)三种滤光镜。机器视觉传感的“选择方式”与人类的颜色感知没有任何关系,除非RGB三种滤光镜的光谱响应曲线正好是人类三种锥状体的光谱响应曲线的线性组合。
人眼难以区分的颜色被称作同色异谱(或者条件等色)如果一个机器视觉系统的颜色匹配特性和人类视觉系统的颜色匹配特性相同,那么该机器视觉系统所具有的光谱灵敏度一定是人类的锥状体细胞的光谱灵敏度的线性组合。