简介
透视投影是3D固定流水线的重要组成部分,是将相机空间中的点从视锥体(frustum)变换到规则观察体(Canonical View Volume)中,待裁剪完毕后进行透视除法的行为。在算法中它是通过透视矩阵乘法和透视除法两步完成的。
具体的理论推导过程可以参考下面的几个Link,
代码实现
首先是Perspective的Camera,用Unity的Camera来作为参照。

(0,0,0)点放一个quad
加一个脚本来测试一下
Debug.Log("ProjectionMatrix\n" + GetComponent<Camera>().projectionMatrix);
Debug.Log("ViewMatrix\n" + GetComponent<Camera>().worldToCameraMatrix);
Debug.Log("ModeMatrix\n" + mesh.transform.localToWorldMatrix);
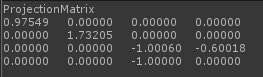
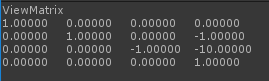
打印出相机的矩阵,结果如下
打印quad各个顶点的位置。
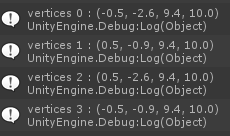
经过计算
P * V *M * Vector4(pos, 1) ,得到结果
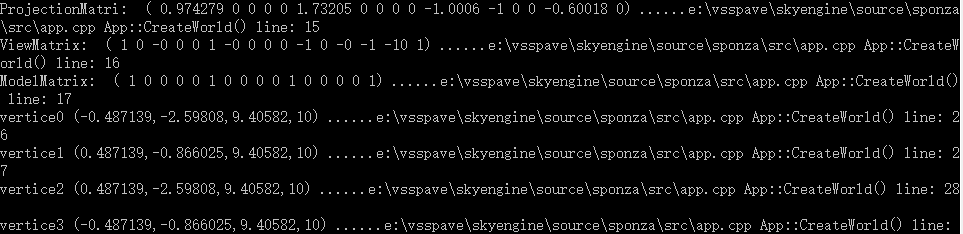
C++ 代码
camera = new Camera(Vector3(0, 1, -10), 60,16.0f / 9, 0.3f, 1000);
Matrix4x4 model = Matrix4x4::identity;
qDebug() <<"ProjectionMatri: " << camera->GetProjectionMatrix();
qDebug() << "ViewMatrix: " << camera->GetViewMatrix();
qDebug() << "ModelMatrix: " << model;
Vector3 vertice0(-0.5f, -0.5F, 0);
Vector3 vertice1(0.5f, 0.5F, 0);
Vector3 vertice2(0.5f, -0.5F, 0);
Vector3 vertice3(-0.5f, 0.5F, 0);
Matrix4x4 mvp = camera->GetProjectionMatrix() * camera->GetViewMatrix() * model;
//Vector3 tmp = mvp * vertice0;
qDebug() << "vertice0" << mvp * Vector4(vertice0.x, vertice0.y, vertice0.z, 1);
qDebug() << "vertice1" << mvp * Vector4(vertice1.x, vertice1.y, vertice1.z, 1);
qDebug() << "vertice2" << mvp * Vector4(vertice2.x, vertice2.y, vertice2.z, 1);
qDebug() << "vertice3" << mvp * Vector4(vertice3.x, vertice3.y, vertice3.z, 1);
结果
其中
Perspective函数如下
Matrix4x4 Transform::Perspective(float fovy, float aspect, float zNear, float zFar)
{
float tanHalfFovy = tan(Mathf::Deg2Rad * fovy / 2);
Matrix4x4 result(0.0f);
result[0 * 4 + 0] = 1.0f / (aspect * tanHalfFovy);
result[1 * 4 + 1] = 1.0f / (tanHalfFovy);
result[2 * 4 + 3] = -1.0f;
result[2 * 4 + 2] = -(zFar + zNear) / (zFar - zNear);
result[3 * 4 + 2] = -(2.0f * zFar * zNear) / (zFar - zNear);
return result;
}
同样功能的还有Frustum函数
Matrix4x4 Transform::Frustum(float l, float r, float b, float t, float zNear, float zFar)
{
Matrix4x4 result(0.0f);
result[0] = 2 * zNear / (r - l);
result[8] = (r + l) / (r - l);
result[5] = 2 * zNear / (t - b);
result[9] = (t + b) / (t - b);
result[10] = -(zFar + zNear) / (zFar - zNear);
result[14] = -(2 * zFar * zNear) / (zFar - zNear);
result[11] = -1;
result[15] = 0;
return result;
}Opengl的流水线如下图

乘完了MVP矩阵,得到的是Clip Coordinates。
坐标除以w之后(称为透视除法),得到了NDC坐标
最后通过线性变换,得到最终的屏幕空间坐标。
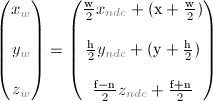
Opengl里面设置view port通常是这样
glViewport(x, y, w, h);
glDepthRange(n, f);对应关系如下

还是继续上面的例子进行计算
同除以w之后,得到NDC坐标
Vector3 ndcPos0 = Vector3(clipPos0.x / clipPos0.w, clipPos0.y / clipPos0.w, clipPos0.z / clipPos0.w);
Vector3 ndcPos1 = Vector3(clipPos1.x / clipPos1.w, clipPos1.y / clipPos1.w, clipPos1.z / clipPos1.w);
Vector3 ndcPos2 = Vector3(clipPos2.x / clipPos2.w, clipPos2.y / clipPos2.w, clipPos2.z / clipPos2.w);
Vector3 ndcPos3 = Vector3(clipPos3.x / clipPos3.w, clipPos3.y / clipPos3.w, clipPos3.z / clipPos3.w);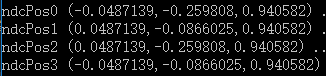
在一个640* 360 的窗口中,
int x = 0, y = 0, w = 640, h = 360, n = 0.3, f =1000;
Vector3 screenPos0(w * 0.5f * ndcPos0.x + x + w * 0.5f, h* 0.5f * ndcPos0.y + y + h *0.5f, 0.5f *(f - n) * ndcPos0.z + 0.5f * (f + n));
Vector3 screenPos1(w * 0.5f * ndcPos1.x + x + w * 0.5f, h* 0.5f * ndcPos1.y + y + h *0.5f, 0.5f *(f - n) * ndcPos1.z + 0.5f * (f + n));
Vector3 screenPos2(w * 0.5f * ndcPos2.x + x + w * 0.5f, h* 0.5f * ndcPos2.y + y + h *0.5f, 0.5f *(f - n) * ndcPos2.z + 0.5f * (f + n));
Vector3 screenPos3(w * 0.5f * ndcPos3.x + x + w * 0.5f, h* 0.5f * ndcPos3.y + y + h *0.5f, 0.5f *(f - n) * ndcPos3.z + 0.5f * (f + n));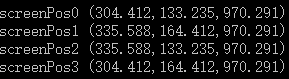
和最终显示的结果一致。
完整的代码
//Perspective matrix test
/*
camera = new Camera(Vector3(0, 1, -10), 60, 16.0f / 9, 0.3f, 1000);
Matrix4x4 model = Matrix4x4::identity;
qDebug() <<"ProjectionMatri: " << camera->GetProjectionMatrix();
qDebug() << "ViewMatrix: " << camera->GetViewMatrix();
qDebug() << "ModelMatrix: " << model;
Vector3 vertice0(-0.5f, -0.5F, 0);
Vector3 vertice1(0.5f, 0.5F, 0);
Vector3 vertice2(0.5f, -0.5F, 0);
Vector3 vertice3(-0.5f, 0.5F, 0);
Matrix4x4 mvp = camera->GetProjectionMatrix() * camera->GetViewMatrix() * model;
//Vector3 tmp = mvp * vertice0;
Vector4 clipPos0 = mvp * Vector4(vertice0.x, vertice0.y, vertice0.z, 1);
Vector4 clipPos1 = mvp * Vector4(vertice1.x, vertice1.y, vertice1.z, 1);
Vector4 clipPos2 = mvp * Vector4(vertice2.x, vertice2.y, vertice2.z, 1);
Vector4 clipPos3 = mvp * Vector4(vertice3.x, vertice3.y, vertice3.z, 1);
qDebug() << "clipPos0" << clipPos0;
qDebug() << "clipPos1" << clipPos1;
qDebug() << "clipPos2" << clipPos2;
qDebug() << "clipPos3" << clipPos3;
Vector3 ndcPos0 = Vector3(clipPos0.x / clipPos0.w, clipPos0.y / clipPos0.w, clipPos0.z / clipPos0.w);
Vector3 ndcPos1 = Vector3(clipPos1.x / clipPos1.w, clipPos1.y / clipPos1.w, clipPos1.z / clipPos1.w);
Vector3 ndcPos2 = Vector3(clipPos2.x / clipPos2.w, clipPos2.y / clipPos2.w, clipPos2.z / clipPos2.w);
Vector3 ndcPos3 = Vector3(clipPos3.x / clipPos3.w, clipPos3.y / clipPos3.w, clipPos3.z / clipPos3.w);
qDebug() << "ndcPos0" << ndcPos0;
qDebug() << "ndcPos1" << ndcPos1;
qDebug() << "ndcPos2" << ndcPos2;
qDebug() << "ndcPos3" << ndcPos3;
int x = 0, y = 0, w = 640, h = 360, n = 0.3, f =1000;
Vector3 screenPos0(w * 0.5f * ndcPos0.x + x + w * 0.5f, h* 0.5f * ndcPos0.y + y + h *0.5f, 0.5f *(f - n) * ndcPos0.z + 0.5f * (f + n));
Vector3 screenPos1(w * 0.5f * ndcPos1.x + x + w * 0.5f, h* 0.5f * ndcPos1.y + y + h *0.5f, 0.5f *(f - n) * ndcPos1.z + 0.5f * (f + n));
Vector3 screenPos2(w * 0.5f * ndcPos2.x + x + w * 0.5f, h* 0.5f * ndcPos2.y + y + h *0.5f, 0.5f *(f - n) * ndcPos2.z + 0.5f * (f + n));
Vector3 screenPos3(w * 0.5f * ndcPos3.x + x + w * 0.5f, h* 0.5f * ndcPos3.y + y + h *0.5f, 0.5f *(f - n) * ndcPos3.z + 0.5f * (f + n));
qDebug() << "screenPos0" << screenPos0;
qDebug() << "screenPos1" << screenPos1;
qDebug() << "screenPos2" << screenPos2;
qDebug() << "screenPos3" << screenPos3;*/
正交投影
在正交相机中,除了projection矩阵计算和透视相机的计算不一样,其他流程都一样。这里给出正交矩阵的计算代码.
先看Unity,相机参数设置如下
注意一下size指的是
This is half of the vertical size of theviewing volume. Horizontal viewing size varies depending on viewport's aspectratio.
正交相机常常用于UI显示。
对于一个640*360的屏幕,size就等于h/2 = 180.

这时候得到的透视矩阵是
C++代码
Matrix4x4 Transform::OrthoFrustum(float l, float r, float b, float t, float zNear, float zFar)
{
Matrix4x4 result(0.0f);
result[0] = 2 / (r - l);
result[5] = 2 / (t - b);
result[10] = -2 / (zFar - zNear);
result[15] = 1;
//result[12] = -(r + l) / (r - l);
//result[13] = -(t + b) / (t - b);
result[14] = -(zFar + zNear) / (zFar - zNear);
return result;
}
Matrix4x4 projection = Transform::OrthoFrustum(0.0f, static_cast<GLfloat>(creationFlags.width), 0.0f, static_cast<GLfloat>(creationFlags.height), 0.3, 1000);
qDebug() << "Orthographic ProjectionMatri: " << projection;运行结果

后面计算的流程基本和透视投影的计算一致。
至此,MVP完全搞定!