一、树莓派端口驱动
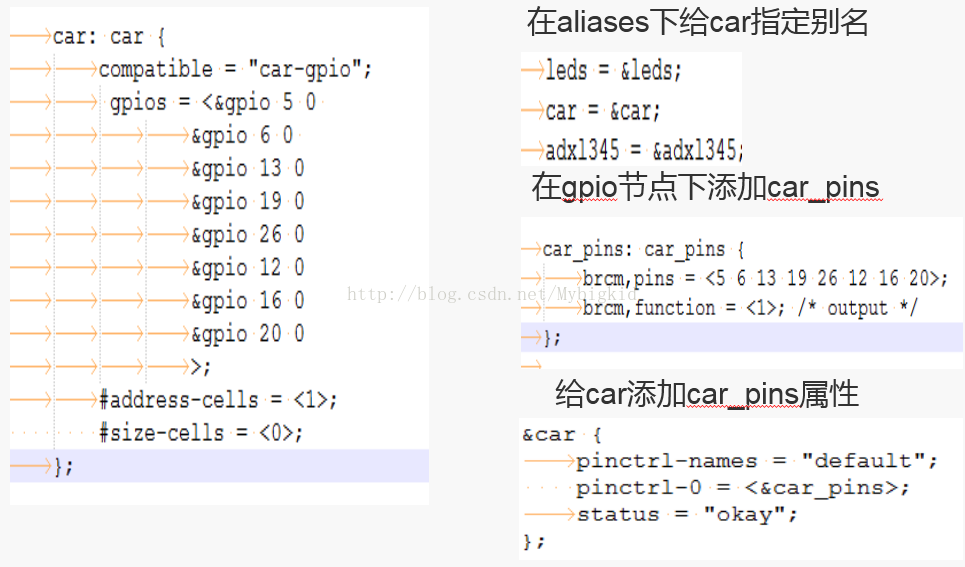
用树莓派的8个端口驱动小车的四个电机(一个电机两根线),首先修改DTS(Device Tree Source)文件(bcm2708_common.dtsi,bcm2710-rpi-3-b.dts),在对应的DTS文件中加入car节点,该节点定义了具体使用树莓派的哪8个端口和一些状态信息。(该节点定义基于GPIO子系统),具体如下:

在修改好DTS文件后,可以重编内核(也可以选择只编译DTS),接下来是驱动程序:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/miscdevice.h>
#include <linux/types.h>
#include <linux/fs.h>
#define CAR_STOP 0
#define CAR_FORWORLD 1
#define CAR_BACK 2
#define CAR_TURN_LIGHT 3
#define CAR_TURN_RIGHT 4
struct wheel {
unsigned int F_pin;
unsigned int B_pin;
bool forworld;
unsigned int scl_is_output_only:1;
};
enum car_direction {
CAR_DIR_STOP = 0,
CAR_DIR_FORWORLD = 1,
CAR_DIR_BACK = 2,
CAR_DIR_RIGHT = 3,
CAR_DIR_LIGHT = 4,
CAR_DIR_NUM = 5
};
struct bcm2835_car {
enum car_direction car_dir;
struct wheel car_wheel[4];
};
struct car_gpio_platform_data {
struct miscdevice car_ctrl_miscdev;
enum car_direction car_dir;
struct wheel car_wheels[4];
struct device car_dev;
};
/* set the direction of the pin */
static void car_gpio_set_direction(void *data, int num, int state)
{
struct car_gpio_platform_data *pdata = data;
struct wheel *car_wheel = pdata->car_wheels;
if (state){
gpio_direction_input(car_wheel[num].F_pin);
gpio_direction_input(car_wheel[num].B_pin);
}else{
gpio_direction_output(car_wheel[num].F_pin, 0);
gpio_direction_output(car_wheel[num].B_pin, 0);
}
}
static void car_gpio_setwheel_direction(void *data, int num, int forworld)
{
struct car_gpio_platform_data *pdata = data;
struct wheel *car_wheel = pdata->car_wheels;
if (1 == forworld){/*forworld*/
gpio_set_value(car_wheel[num].F_pin, 1);
gpio_set_value(car_wheel[num].B_pin, 0);
}else if(-1 == forworld){ /*back*/
gpio_set_value(car_wheel[num].F_pin, 0);
gpio_set_value(car_wheel[num].B_pin, 1);
}else { /*stop*/
gpio_set_value(car_wheel[num].F_pin, 0);
gpio_set_value(car_wheel[num].B_pin, 0);
}
}
static void car_gpio_run_status(void *data, enum car_direction dir)
{
struct car_gpio_platform_data *pdata = data;
switch(dir){
case CAR_DIR_STOP:
printk(KERN_DEBUG "CAR_DIR_STOP:\n");
car_gpio_setwheel_direction(pdata,0,0);
car_gpio_setwheel_direction(pdata,1,0);
car_gpio_setwheel_direction(pdata,2,0);
car_gpio_setwheel_direction(pdata,3,0);
break;
case CAR_DIR_FORWORLD:
printk(KERN_DEBUG "CAR_DIR_FORWORLD:\n");
car_gpio_setwheel_direction(pdata,0,1);
car_gpio_setwheel_direction(pdata,1,1);
car_gpio_setwheel_direction(pdata,2,1);
car_gpio_setwheel_direction(pdata,3,1);
break;
case CAR_DIR_BACK:
printk(KERN_DEBUG "CAR_DIR_BACK:\n");
car_gpio_setwheel_direction(pdata,0,-1);
car_gpio_setwheel_direction(pdata,1,-1);
car_gpio_setwheel_direction(pdata,2,-1);
car_gpio_setwheel_direction(pdata,3,-1);
break;
case CAR_DIR_RIGHT:
printk(KERN_DEBUG "CAR_DIR_RIGHT:\n");
car_gpio_setwheel_direction(pdata,0,1);
car_gpio_setwheel_direction(pdata,1,-1);
car_gpio_setwheel_direction(pdata,2,1);
car_gpio_setwheel_direction(pdata,3,-1);
break;
case CAR_DIR_LIGHT:
printk(KERN_DEBUG "CAR_DIR_LIGHT:\n");
car_gpio_setwheel_direction(pdata,0,-1);
car_gpio_setwheel_direction(pdata,1,1);
car_gpio_setwheel_direction(pdata,2,-1);
car_gpio_setwheel_direction(pdata,3,1);
break;
}
}
static int of_car_gpio_get_pins(struct device_node *np,
struct wheel *wheel_pin)
{
int i=0;
if (of_gpio_count(np) < 8)
return -ENODEV;
for(i=0; i<4; i++){
wheel_pin[i].F_pin = of_get_gpio(np, i*2);
wheel_pin[i].B_pin = of_get_gpio(np, i*2 + 1);
printk(KERN_INFO "wheel_pin[i].F_pin = %d wheel_pin[i].B_pin=%d \n",wheel_pin[i].F_pin,wheel_pin[i].B_pin);
if (wheel_pin[i].F_pin == -EPROBE_DEFER || wheel_pin[i].B_pin == -EPROBE_DEFER)
return -EPROBE_DEFER;
if (!gpio_is_valid(wheel_pin[i].F_pin) || !gpio_is_valid(wheel_pin[i].B_pin)) {
pr_err("%s: invalid GPIO pins, F_pin=%d/B_pin=%d\n",
np->full_name, wheel_pin[i].F_pin, wheel_pin[i].F_pin);
return -ENODEV;
}
}
return 0;
}
static int car_ctrl_open(struct inode *inode, struct file *file)
{
struct car_gpio_platform_data *data;
struct miscdevice *miscdev = file->private_data;
data = container_of(miscdev,struct car_gpio_platform_data, car_ctrl_miscdev);
file->private_data = data; /*Now, the private_data point to platform device driver data*/
return 0;
}
static int car_ctrl_release(struct inode *inode, struct file *file)
{
struct car_gpio_platform_data *data = file->private_data;
kfree(data);
return 0;
}
static long car_ctrl_ioctl(struct file *file, unsigned int cmd,
unsigned long arg)
{
struct car_gpio_platform_data *car_data = file->private_data;
if(cmd > CAR_DIR_STOP && cmd < CAR_DIR_NUM)
car_gpio_run_status(car_data,cmd);
#if 0
switch (cmd) {
case CAR_FORWORLD:
printk(KERN_INFO "CAR_FORWORLD \n ");
car_gpio_run_status();
break;
case CAR_BACK:
printk(KERN_INFO "CAR_BACK \n ");
break;
case CAR_TURN_LIGHT:
printk(KERN_INFO "CAR_TURN_LIGHT \n ");
break;
case CAR_TURN_RIGHT:
printk(KERN_INFO "CAR_TURN_RIGHT \n ");
break;
case CAR_STOP:
printk(KERN_INFO "CAR_STOP \n ");
break;
default:
err = -ENOTTY;
break;
}
#endif
return 1;
}
static const struct file_operations car_ctrl_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = car_ctrl_ioctl,
.open = car_ctrl_open,
.release = car_ctrl_release,
};
static int car_gpio_probe(struct platform_device *pdev)
{
struct car_gpio_platform_data *pdata;
struct wheel *car_wheel_temp;
struct miscdevice *car_misc;
unsigned int i;
char name[20];
int ret;
pdata = devm_kzalloc(&pdev->dev, sizeof(*pdata), GFP_KERNEL);
car_wheel_temp = pdata->car_wheels;
car_misc = &pdata->car_ctrl_miscdev;
printk(KERN_INFO "car_gpio_probe !!!!!!!!!!!!!!!!!!!!!!!!!\n");
/* First get the GPIO pins; if it fails, we'll defer the probe. */
if (pdev->dev.of_node){
ret = of_car_gpio_get_pins(pdev->dev.of_node,
car_wheel_temp);
if (ret)
return ret;
} else {
return -ENXIO;
}
for(i=0; i<4; i++) {
printk(KERN_INFO "car_wheel_temp[i].F_pin = %d\n",car_wheel_temp[i].F_pin);
sprintf(name,"CAR_wheel_%d_F",i);
ret = devm_gpio_request(&pdev->dev, car_wheel_temp[i].F_pin, name);
if (ret) {
if (ret == -EINVAL)
ret = -EPROBE_DEFER; /* Try again later */
return ret;
}
printk(KERN_INFO "devm_gpio_request name = %s\n",name);
sprintf(name,"CAR_wheel_%d_B",i);
ret = devm_gpio_request(&pdev->dev, car_wheel_temp[i].B_pin, name);
if (ret) {
if (ret == -EINVAL)
ret = -EPROBE_DEFER; /* Try again later */
return ret;
}
printk(KERN_INFO "devm_gpio_request name = %s\n",name);
}
for(i=0;i<4;i++)
car_gpio_set_direction(pdata,i,0);
//准备组册设备
car_misc->minor = MISC_DYNAMIC_MINOR;
car_misc->name = "car";
car_misc->fops = &car_ctrl_fops;
car_misc->parent = &pdev->dev;
ret = misc_register(car_misc);
if (ret) {
dev_err(&pdev->dev,
"unable to register misc device, err=%d\n", ret);
return 0;
}
platform_set_drvdata(pdev, pdata);
dev_info(&pdev->dev, "Finish car probe successfully \n");
return 0;
}
static int car_ctrl_remove(struct platform_device *pdev)
{
struct car_gpio_platform_data *car_data;
car_data = platform_get_drvdata(pdev);
if (!car_data)
return -ENODATA;
misc_deregister(&car_data->car_ctrl_miscdev);
return 0;
}
static int car_gpio_remove(struct platform_device *pdev)
{
car_ctrl_remove(pdev);
return 0;
}
#if defined(CONFIG_OF)
static const struct of_device_id car_gpio_dt_ids[] = {
{ .compatible = "car-gpio", },
{ /* */ }
};
MODULE_DEVICE_TABLE(of, car_gpio_dt_ids);
#endif
static struct platform_driver car_gpio_driver = {
.driver = {
.name = "car-gpio",
.of_match_table = of_match_ptr(car_gpio_dt_ids),
},
.probe = car_gpio_probe,
.remove = car_gpio_remove,
};
static int __init car_gpio_init(void)
{
int ret;
printk(KERN_INFO "Entry car_gpio_init !!!!!!!!!!!!!!!!!!!!!!\n");
ret = platform_driver_register(&car_gpio_driver);
if (ret)
printk(KERN_ERR "car-gpio: probe failed: %d\n", ret);
return ret;
}
module_init(car_gpio_init);
static void __exit car_gpio_exit(void)
{
platform_driver_unregister(&car_gpio_driver);
}
module_exit(car_gpio_exit);
MODULE_DESCRIPTION("Platform-independent car driver");
MODULE_LICENSE("GPL");
MODULE_ALIAS("platform:car-gpio");二、驱动代码和一般驱动代码的框架一样,主要在ioctl上实现自己的逻辑为应用程序提供接口。再接着是应用程序测试。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include "api_car.h"
int main(void)
{
int fd_car;
char chr;
int delay = 20;
int mode=0;
fd_car = api_car_open();
if(fd_car < 0){
printf("fd_car open faicar!\n");
return -1;
}
while(delay--)
{
printf("Please input car mode [0~4]: ");
scanf("%d",&chr);
printf("\nmode = %d\n",chr);
api_car_ioctl(fd_car, chr);
}
printf("Hello, Water CARs run!\n");
api_car_close(fd_car);
return 0;
}