参考资料
https://blog.csdn.net/yangdashi888/article/details/52994074
https://blog.csdn.net/jeffasd/article/details/77944822
《视觉SLAM十四讲》
世界坐标系
由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,常见的做法是设定一个惯性坐标系,认为他是固定不变的,该坐标系称为世界坐标系。像机坐标系与世界坐标系之间的关系可以用旋转矩阵与平移向量来描述。
相机坐标系
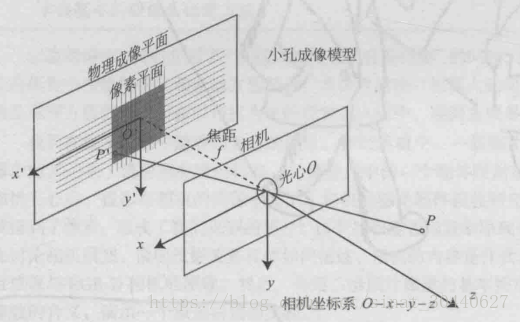
图像坐标系(像素坐标系)
为了描述传感器将感受到的光线转换成图像像素的过程,我们设在物理成像平面上固定着一个像素平面。摄像机采集的数字图像在计算机内可以存储为数组,数组中的每一个元素(象素,pixel)的值即是图像点的亮度(灰度)。
左上角为原点,x轴向右,y轴向下。
世界坐标系—(R,t)———》相机坐标系———(内参K)—》图像坐标系
成像平面坐标系
上图中的O‘x'y'平面,以物理单位(例如厘米)表示的成像平面坐标系。
车辆坐标系
一般以车辆后轴为中心,x轴正方向指向车头,y轴正方向指向车左侧,z轴正方形竖直向上。
左手坐标系&右手坐标系
尺度不确定性
单目视觉具有尺度不确定性,即0.88究竟是指0.88m还是0.88cm是不确定的。所以不可避免的需要对单目SLAM进行初始化,初始化不能只有旋转,必须有一定程度的平移,左右平移初始化最好。
补充:
齐次坐标
欧式空间(笛卡尔空间)、透视空间
在欧氏几何空间,同一平面的两条平行线不能相交,这是我们都熟悉的一种场景。
然而,在透视空间里面,两条平行线可以相交,例如:火车轨道随着我们的视线越来越窄,最后两条平行线在无穷远处交于一点。
如果一个点在无穷远处,这个点的坐标将会(∞,∞),在欧氏空间,这变得没有意义。
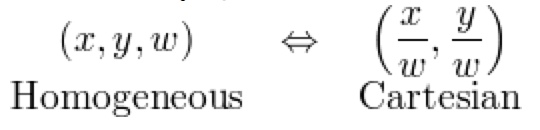
简而言之,齐次坐标就是用N+1维来代表N维坐标
我们可以在一个2D笛卡尔坐标末尾加上一个额外的变量w来形成2D齐次坐标,因此,一个点(X,Y)在齐次坐标里面变成了(x,y,w),并且有
X = x/w
Y = y/w
例如,笛卡尔坐标系下(1,2)的齐次坐标可以表示为(1,2,1),如果点(1,2)移动到无限远处,在笛卡尔坐标下它变为(∞,∞),然后它的齐次坐标表示为(1,2,0),因为(1/0, 2/0) = (∞,∞),我们可以不用”∞"来表示一个无穷远处的点了。
为什么叫齐次坐标?
我们把齐次坐标转化为笛卡尔坐标的方法是前面n-1个坐标分量分别除以最后一个分量即可。
转化齐次坐标到笛卡尔坐标的过程中,我们有一个发现,例如:
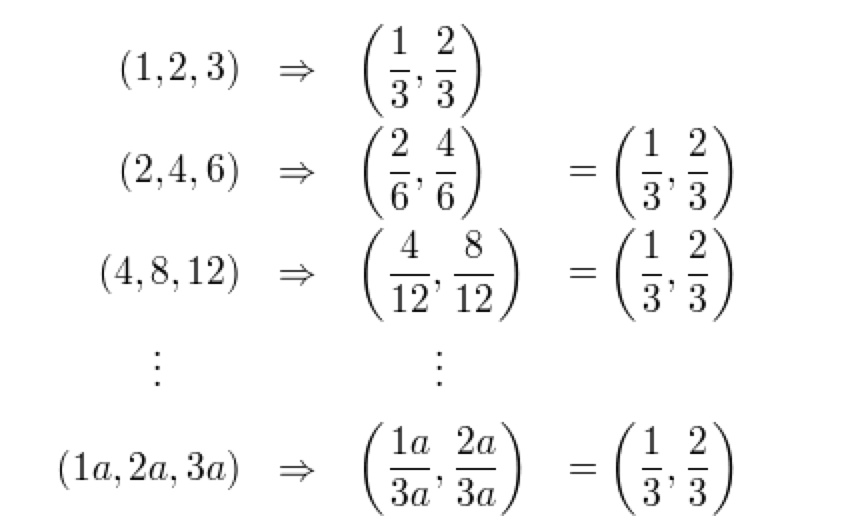
你会发现(1, 2, 3), (2, 4, 6) 和(4, 8, 12)对应同一个Euclidean point (1/3, 2/3),任何标量的乘积,例如(1a, 2a, 3a) 对应 笛卡尔空间里面的(1/3, 2/3) 。因此,这些点是“齐次的”,因为他们代表了笛卡尔坐标系里面的同一个点。换句话说,齐次坐标有规模不变性。
ok,后面再继续补充。