一、ADAS 产业链解析:传感感知,算法决策,电控执行。
1. 感知层:“视觉系”与“雷达系”传感器各有所长。ADAS的传感器也有多种类型,其中超声波传感器、车载摄像头、毫米波雷达、激光雷达以及夜视系统是较为重要的传感器。
- 车载摄像头:利用优质摄像头设备可以精确捕捉图像信息,理解图像信息则依赖于算法的实现(手机镜头制造商积极布局车载摄像头:eg. 宝马i8用摄像头取代后视镜)
- 毫米波雷达:波长为1~10毫米的电磁波称毫米波(millimeter wave),它位于微波与远红外波相交叠的波长范围,因而兼有两种波的特点:
- 极宽的带宽,这在频率资源紧张的今天无疑极具吸引力;(毫米波频率范围为26.5~300GHz,带宽高达273.5GHz)
- 波束窄,因此可以分辨相距更近的小目标以及更为清晰地观察目标的细节;
- 与激光相比,毫米波的传播受气候的影响要小得多,具有全天候稳定性。
- 与微波相比,毫米波元器件的尺寸要小得多,更容易小型化。
- 激光雷达:激光雷达能够对环境信息进行3D建模,可以对周边环境的动态信息和位置分布实现准确刻画。激光雷达是谷歌无人驾驶汽车的基础性传感器设备(Velodyne HDL-64E的360度64束激光雷达传感器),限制激光雷达在无人驾驶领域广泛应用的主要因素在于成本。
- 夜视系统:目前,进入应用阶段的夜视技术主要有类:微光夜视技术和红外夜视技术。由于夜视系统价格高昂,目前仍然仅应用于一些豪华车型。
传感器各有利弊,走向融合、优势互补将成为未来趋势。(如tesla等车辆同时采用多种传感器)

2. 算法层:
- 算法的进步有望带来更低成本的ADAS和无人驾驶解决方案: 目前的ADAS龙头Mobileye采用的传感器设备并不是昂贵的雷达系传感器,而是具备成本优势的单目摄像头。基于成熟的算法,Mobileye同样实现了高效的FCW、LKA、PCW等ADAS功能。Mobileye的做法对后续进入ADAS和无人驾驶领域的企业具有启发作用。
- 深度学习加速无人驾驶商业化进程: 谷歌等互联网企业的无人驾驶系统主要是依靠“深度学习”的方式不断“驯化”的(迭代学习)。
3. 执行层:执行层环节的实现对硬件技术要求很高,主要集中于整车厂本身以及博世、大陆等Tier 1供应商。
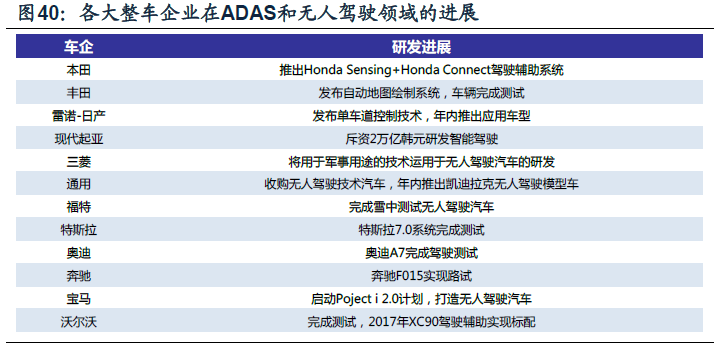
二、无人驾驶路线:无人驾驶系统的主要竞争方是以谷歌为代表的互联网企业和以福特、奥迪、沃尔沃等为代表的各大整车厂
- 以谷歌为代表的互联网企业在ADAS和无人驾驶的核心的竞争力位于产业链的算法层。谷歌自身并不生产汽车,其无人驾驶的实现依托于其自身的整合能力。以算法为核心完成对硬件设备制造商的供应链整合,是互联网企业实现无人驾驶的方式。
- 整车企业:“从硬到软”,逐步从ADAS发展到完全无人驾驶。以奥迪、沃尔沃、宝马等为代表的老牌整车厂商,先后推出了方向盘辅助、自适应巡航控制系统、行人探测系统、自动泊车系统、自动切换车道系统等ADAS功能。
【算法基本没有深层分析,估计因为没有足够资料】
【整车厂渐进式的发展路线其实容易理解,毕竟车厂已在传统行业内建立优势,不愿承担过大的风险;谷歌、特斯拉作为科技创新公司,不以卖车为生,故而可以大刀阔斧,百度、乐视等也是一样】
资料来源:广发证券