在本教程中,我们将使用Arduino和TMP102温度传感器来测量房间内的环境温度。
本教程的目标有两个。第一个是显示一个测量温度节点。第二个是演示Arduino作为ROS的I2C接口。
TMP102是使用I2C进行通信的众多硬件之一。现在,您可以使用Arduino轻松地将SPI / I2C接口连接到ROS。
1 硬件
在本教程中,您需要一个的Arduino和来自Sparkfun的TMP102 Breakout板。该板是一个很好的小温度传感器,可以0.625℃的分辨率测量温度。将它连接到Arduino非常简单。它是通过I2C的3.3V传感器通信,因此它连接到Arduino的3.3V输出,GND,SDA和SCL引脚。SDA和SCL分别是I2C数据线和I2C时钟线。它们作为模拟引脚4和5在Arduino板上。
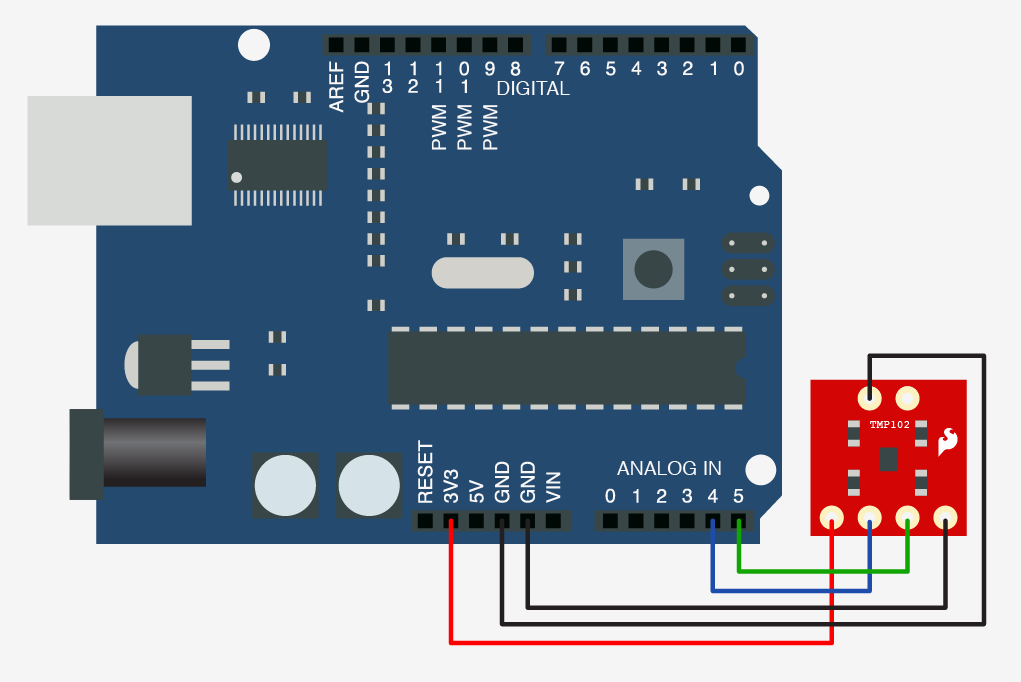
图来自这里
2 程序
#include <Wire.h>
#include <ros.h>
#include <std_msgs/Float32.h>
//Set up the ros node and publisher
std_msgs::Float32 temp_msg;
ros::Publisher pub_temp("temperature", &temp_msg);
ros::NodeHandle nh;
int sensorAddress = 0x91 >> 1; // From datasheet sensor address is 0x91
// shift the address 1 bit right,
//the Wire library only needs the 7
// most significant bits for the address
void setup()
{
Wire.begin(); // join i2c bus (address optional for master)
nh.initNode();
nh.advertise(pub_temp);
}
long publisher_timer;
void loop()
{
if (millis() > publisher_timer) {
// step 1: request reading from sensor
Wire.requestFrom(sensorAddress,2);
delay(10);
if (2 <= Wire.available()) // if two bytes were received
{
byte msb;
byte lsb;
int temperature;
msb = Wire.read(); // receive high byte (full degrees)
lsb = Wire.read(); // receive low byte (fraction degrees)
temperature = ((msb) << 4); // MSB
temperature |= (lsb >> 4); // LSB
temp_msg.data = temperature*0.0625;
pub_temp.publish(&temp_msg);
}
publisher_timer = millis() + 1000; //publish once a second
}
nh.spinOnce();
}本例中的特殊代码是使用Arduino的Wire库。Wire是一个I2C库,可简化对I2C总线的读写操作。
3 测试
roscorerostopic echo temperature