红外成像原理
光源采用为波长为850 nm 的红外LED(L850-04UP)。由于血红蛋白在波长为850 nm 和 760 nm 处具有两个吸收峰, 因此 850 nm 波长的近红外光容易被静脉所吸收。实验中, 使用了 8个中心波长在850 nm 的光源,其波长曲线如图3 所示

4 特征提取
原始手指静脉红外图像中包含了静脉模式、背景图像和设备噪声。要从图像中得到需要的纯粹静脉模式并描述其特征,是指静脉识别系统的关键问
4.1 图像预处理
由于原图像中含有噪声,在位于灰度剖面曲线上有些孤立的噪声点, 因此首先需要对图像预处理。采用自适应直方图和中值滤波相结合的方法对图像进行预处理。设近红外图像是灰度图像 f(x , y),预处理流程如图5 所示

4.2 指静脉模式提取
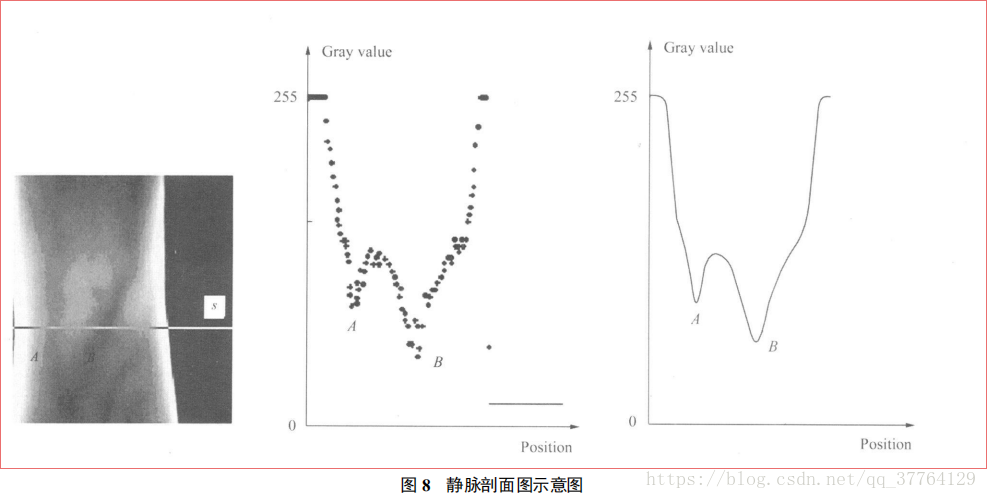
图 7为指静脉特定横断截线处的亮度分布曲线,沿指静脉的横断截线A -B-C 的灰度图像呈谷状分布,手指两侧的静脉亮度比中间的部分亮度高。总体上,指静脉模式的亮度分布类似高斯函数

实际获取的指静脉图像如 8 所示, 横断截线处有两根静脉,分别标记为 A、B 。两根静脉有着不同的亮度和宽度, A 位置的灰度值大于 B 位置, A 位置的静脉宽比 B 位置要窄;手指两侧的静脉亮度比中间部分高,从上下两端向中间的静脉亮度逐渐变暗。由于实际情况是一些离散的点,为了能够更清楚观察横截面中各点的灰度值,图 8中, 又以连续情况绘出了指静脉横截面各点灰度值。
假设F(x ,y)是指静脉采集红外图像,G(S)是F(x , y)在竖直方向S 位置剖面,则 G(S)为Gf(S)=F(x , S)。剖面曲线上有一些奇异点, 这些点是由于原图像中含有噪声, 因此对这些曲线上孤立的噪声点做平滑处理。实际上,无论指静脉图像的亮度和宽度大小如何, 曲率最大处一定是可能的静脉模式,因此可以就通过计算剖面图的曲率检测静脉模式, 这也是实现指静脉系统识别的基本原理。实际离散图像f(x)计算曲线Cf(x)的定义为

式中, w 取值为 8时较为合适。约定手指尖向上,位置灰度剖面图的方向为垂直截取。数据的处理过程为:
1)计算垂直于手指方向的某一位置的位置灰度剖面图的曲率;
2)检测该位置静脉模式的中心;
3)连接重构图像上的点,并去除噪声点;
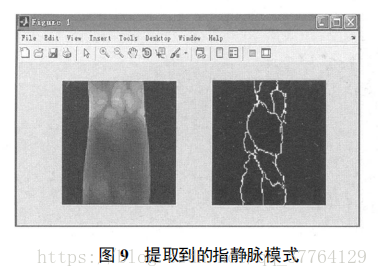
4)充分利用上述方法检测斜方向 30°两个方向上的静脉模式,然后合并成 3 个方向上的图像, 就可以得到提取的指静脉模式, 如图9所示。
基础知识
1、血管影像分割技术的发展
包括跟踪方法、灰度脊和骨架方法、区域增长方法、Hessian矩阵估计方法、数学形态学方法、自适应阈值、匹配滤波方法、多尺度方法、统计推断、局部模型等等。
2、血管影像分割方法
血管影像的分割方法可以有很多分类,根据指导思想的不同,可以分为:
(1)以计算机为单一执行者的自动分割方法和人机交互式的分割方法。
(2)基于区域像素灰度值的特性,可以分为利用区域间灰度不连续性的基于边界的算法和利用区域内灰度相似性的基于区域的方法。根据以上理论,可以将血管分割分为:
a.基于边界的自动分割。
b.基于区域的自动分割。
c.基于边界的人机交互分割。
d.基于区域的人机交互分割。
此外,根据分割过程中处理策略的不同,分割方法还可分为并行分割法和串行分割法。
一、《血管影像清晰化软件设计研究》(处理效果一般)
血管分割步骤:
1)预处理:减噪平滑及边缘增强和对血管结构信息的保护——采用分段线性分割
2)分割:将标记过程融入到水域分割——分水岭算法
对于手背血管影像而言,主要是减噪平滑及边缘增强和对血管结构信息的保护。然而,噪声滤波和边缘增强常常是互有冲突的处理,噪声平滑本身就会破坏边缘细节,而边缘的锐化也会意味着增强噪声,需要我们找寻一个合适的平衡点。鉴于血管影像低对比度,模糊的特点,首先我们对手臂血管图像进行对比度处理,一种常用的方法是图像灰度变换法,即直接采用某种变换修正图像像素的值以改善图像对比度。有很多方法可以实现图像的灰度变换,线性变换,分段线性变换,对数变换,幂次变换,图像取反,灰度切分,锯齿形变换等方法是常用的方法。在这诸多方法之中,分段线性方法常用来突出感兴趣的灰度空间而抑制不感兴趣的灰度区间,因此采用分段线性变换增强其对比度,分段线性变换实际上是一种非线性变换。
分水岭算法对微弱边缘也具有良好效果的特性,在很多时候会造成过分割。消除过分割,通常有两种选择,一是通过修改梯度函数使之只对要探测的目标响应,二是利用先验知识去除不需要的边缘。最常用的解决方法是将标记过程融入到水域分割。 基于以上理论,算法的实现过程由两个重要步骤来得到,即选择合适的梯度算子和标记函数。梯度算子的选择优劣直接关系到血管影像分割结果的优劣,根据对表 3.2 的比较分析,综合算法复杂度,噪声抑制能力等因素,选取 Sobel 算子进行梯度变换。得到梯度图后,通过选择合适的标记函数将图像中的目标及背景区分开来,得到所需的标记图,最后将标记图中的相关标记作为种子点,完成水域分割,得到最终所需的血管影像。
初始参数设置
:(1)原始图像数组;(2)存储种子的数组;(3)存储标记的数组;(4)原始图像的行号;(5)原始图像的列号。
二、《一种视网膜血管自适应提取方法》(可以试一下)
该方法是首先把图像划分成很多同样尺寸的小子图像, 然后在每个子图像中分别计算局部阈值, 并用该阈值分割该子图像。 因为视网膜图像中血管和背景在局部范围内都比较均匀, 所以在每个子图像中都存在一个局部阈值能够将其中的血管分割出来。 采用的局部阈值计算方法不仅允许子图像可以取得很小, 而且能够保证得到平方误差最小意义下的最优阈值。 在阈值计算过程中, 还用到一种基于过零点边缘检测技术的边缘追踪算法。 最后还提出一种基于区域生长的特征综合方法, 即通过综合两次阈值化分割得到的血管结构来清除碎片。
三、《皮肤表面毛细血管图像的检测与分析》(难实现)
- 2.1判断血管走向
在提取血管的边缘和中心线之前,先要判断血管的路径(走向).图5(a)中深色部分为一条血管,虚线为该血管的垂直线;图5(b)为该垂直线上血管的灰度值纵面图.定义血管垂直线上灰度最小的点尸为路径上的点,不断移动垂直线,就能形成一条连续的线,这就是血管的路径线.在计算邻域内灰度值最小的点时,采用的是圆模板0[].与判定血管路径的点灰度法和灰度最小曲线拟和法相比,圆模板法更适用于判定血管的路径,在选取灰度最小值时,该方法以一确定半径的圆为区域,同时还结合了曲线拟和的方法.圆模板的形状对噪声点有平滑作用,对噪声不敏感,并且符合血管局部灰度渐变的特点,得到的路径线连续性好、曲率突变性小.
- 2.2提取血管边缘信息
血管的边缘存在灰度急剧变化的点,这种灰度的急剧变化是灰度图像分割的重要依据.经典的边缘检测方法是对原始图像按像素的邻域构造边缘算子,如1阶微分算子、soble、iKirhs、Pirweet等〔’].采用微分算子进行检测,可以很好地反映灰度值的突变,由此得到的灰度边缘也符合人眼的判断习惯.血管的边缘与路径基本上有相同的走向,沿血管路径对边缘进行微分,用局部路径的方向来判断血管的走向,从而确定求取边缘微分的方向.在路径上选取起始点,分别求血管中心线的垂直线上各个像素点间的灰度值之差,具有最大值的为边缘点,由此可分别得到左右边缘线.提取出边缘线后,对边缘线进行平滑和连接处理.
- 3参数计算
- 3.1管径的计算
将血管的直径D定义为血管两条边缘线之间距离的统计值.将血管2条边缘线之间的区域进行细化,得到1条血管的中心线,沿该中心线在每个像素点处做此中心线的垂直线,这条垂直线与边缘线的交点之间的距离就是血管的直径.求出所有直径后,计算它们的数学统计平均值,作为该幅图像的管径.
- 3.2长度、密度和平均灰度的计算
血管的长度L:计算血管的中心线在整幅图像中所占像素的点数.血管的密度d:d=Nv/S,式中,N、表示图像中血管的总条数;S表示摄像机拍摄到的实际皮肤面积,可由摄像机的物理性质,经计算后得到.
图像的平均灰度G。、r:G。ve。二g/尸,式中,g表示图像所有像素点的灰度值之和,尸表示所有像素点
的点数之和(640x480),G。~可初步反映治疗前后血管颜色的变化.
四、《医用高清电子内窥镜图像处理技术研究_陈婧》
本文旨在研究高清医用电子内窥镜的图像处理算法及具体实现技术,研究内容包括:图像数据的采集,图像的重建(去马赛克),典型图像处理算法(颜色校正、白平衡、轮廓强调、测光模式、对比度增强等)的实现,动态多光谱技术的原理及实现、对常用十组波长增强细微血管与周围组织对比度效果的评价。主要工作包括以下五方面:
(1)采用双线程的方式来提高图像显示速度,其中线程1用于图像的采集并提取有效的图像数据,线程2进行图像的处理、显示和存储;
(2)为了满足医用内窥镜的实际应用需求,实现了一系列的图像处理算法功能,包括颜色校正、对比度增强、白平衡、测光模式、轮廓强调等;
(3)针对该内窥镜系统的偏色现象,提出了基于YUV颜色空间的四邻域多项式回归法的颜色校正算法,并且比较分析了其校正效果;
(4)在对目前存在的多光谱成像技术优缺点比较的基础上,重点阐述了FICE技术的原理及具体实现过程;
(5)比较常用十组波长增强毛细血管与周围组织对比度的效果,并提出对该效果的客观评价算法,即基于亮度对比度的改进Otsu法的评价算法。
本课题研究设计的基于CMOS图像传感器的高清医用电子内窥镜系统性能指标达到了国际先进水平,其图像处理功能效果都满足临床实践要求,具有实际应用价值。在图像分辨率为1280*800时,其帧率可以达到26fps。而且在该内窥镜系统中,实现了FICE技术功能,并预设了十组常用波长,可以方便的进行切换操作。首次提出了对FICE十组常用波长在增强微细血管与周围组织对比度效果方面的客观评价算法,为临床医务工作者在选择合适的FICE波长组合方面提供了有力的理论依据。
五、《基于形态学的血管图像分割技术研究及其应用_吴立仁》
国内血管图像分割研究大部分采用基于传统形态学处理并结合改进的传统图像分割方法。根据算法适用性的不同,图像分割主要分为利用图像区域内的均匀性特征识别图像中不同区域的区域分割方法和利用区域间不同性质划分区域间分界线的边缘分割方法。
目前主要的基于区域的分割方法有阈值分割,区域生长和分裂合并,分类器和聚类,基于随机场的方法,基于统计学的方法等。闽值分割是最常见的、并行的直接检测区域的分割方法,选定一个阂值即可将图像分割为目标和背景两大类,根据阂值选取的多少又可以分为单闭值分割和多阂值分割。
主要基于边缘分割的方法有并行微分算子,基于曲面拟合方法,边界曲线拟合方法,串行边界查找。并行微分算子的方法用于检测图像中灰度的变化,通过求一阶导数极值点或者二阶导数来检测边缘。基于曲面拟合方法的基本思想是把灰度看成高度,用一个曲面拟合一个小窗口内的数据,在拟合曲面进行边缘检测来决定边缘点。边界曲线拟合方法是用平面曲线来表示不同区域之间的图像边界线,试图根据图像梯度等信息找出正确表示边界的曲线,从而达到图像分割的目的。
除了以上介绍的目前比较广泛采用的图像分割方法外,还有一些分割方法如基于模糊理论的图像分割、基于神经网络的图像分割、图谱引导法等
本文研究的主要内容是
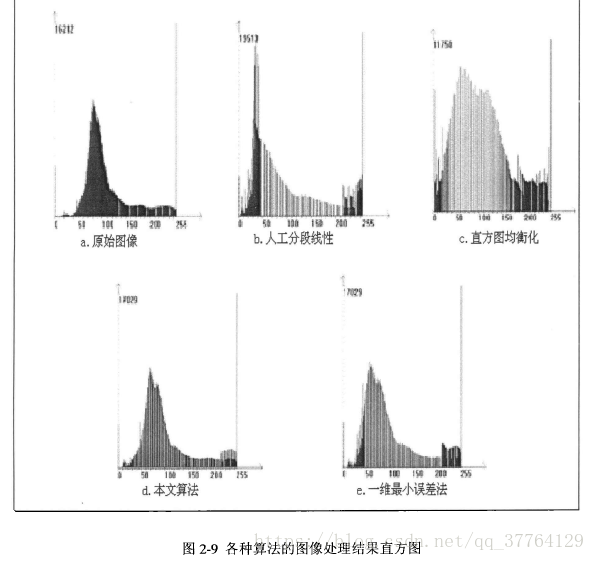
(1) 提出基于分段线性变换的二维最小误差法对原始血管图像进行增强处理。在研究传统分段线性图像增强法的基础之上,进行利用最小误差法自动获取分段点的研究,在已有的基于分段线性变换一维最小误差法的图像增强基础上提出基于分段线性变换二维最小误差法对原始采集得到的医学图像进行灰度增强,然后与传统的图像增强处理方法在处理结果直方图上进行对比,分析各种图像增强方法的优缺点。
(2) 基于血管形态特性采用针对实验血管图像形态特点的结构元素进行形态学处理。
在基于分段线性变换最小误差法对原始医学图像进行增强处理基础上,针对实验血管图像采用适合的结构元素,对增强之后的医学图像进行形态学上处理,过滤噪声,平滑边缘等。通过实验验证本方法的合理性。
(3)采用贝叶斯最小误差法对血管图像进行分割。
在对原始图像增强和形态学处理之后,通过贝叶斯最小误差法来进行图像的分割。并与边缘检测方法的处理结果进行了对比来验证本文方法的有效性