ssd网络详解之detection out layer
本文原创,转载请引用https://blog.csdn.net/dan_teng/article/details/81561783
闲话少说,本文基本结构:首先介绍detection out 这一层的基本理解,之后给出ssd所有代码的详细注释,最后给出caffe中该层各个参数的定义和默认值。
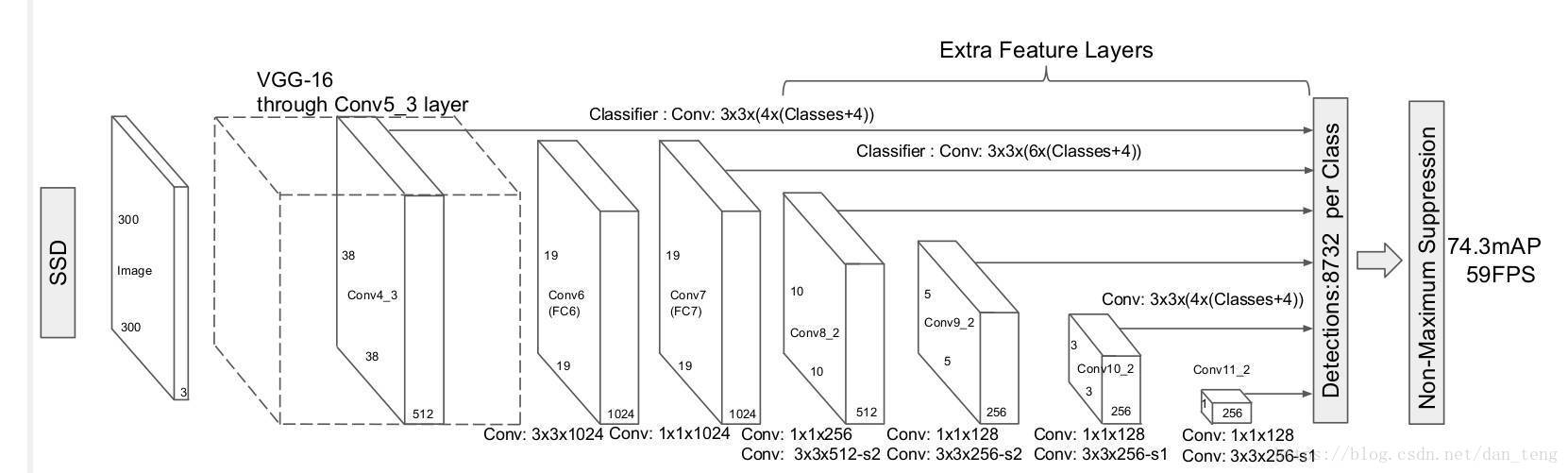
detection out layer是ssd网络最后一层,用于整合预选框、预选框偏移以及得分三项结果,最终输出满足条件的目标检测框、目标的label和得分。
输入方面,mbox_priorbox是网络各个priorbox层输出concat后的结果(priorbox解析点这里),相当于把所有预选框放到一起;mbox_loc是在预选框的基础上的偏移量;mbox_conf_flatten就是每个类别在各个框上的得分。
输出大小为[1, 1, x, 7],其中x是最后保留的框的个数,最后一维存放的数据为:
[image_id, label, confidence, xmin, ymin, xmax, ymax]
计算思路:
1)对bottom层的location、confidence和priorbox进行解析,放到vector中
2)对每个priorbox进行解码。所谓解码其实就是整合输入层。前面说到过了,输出需要给出每个目标的检测框,但是输入是预选框和偏移量,这里要做的就是计算出最终的检测框。解码需要考虑priorbox编码方式,共三种情况。
假设检测框用b表示(存储内容:b_xmin, b_ymin, b_xmax, b_ymax),预选框用p表示(存储内容:p_xmin, p_ymin, p_xmax, p_ymax),偏移量用t表示(存储内容:t_x, t_y, t_height, t_width)。
b和p的宽高分别用x和y的最大最小值减一下得到,中心点的值用最大最小值相加除以2得到。
那么在每种类型中,编码公式分别为:
CodeType_CORNER:
t = b - p(每个维度一样)- 1
- 2
CodeType_CENTER_SIZE:
t_x = (b_center_x – p_center_x) / p_width (t_y同理) t_height = log(b_height / p_height) (t_width同理)- 1
- 2
- 3
CodeType_CORNER_SIZE:
t_x = (b_x – p_x) / p_width t_y = (b_y – p_y) / p_height- 1
- 2
- 3
解码时求取b的各个值就可以。如果需要添加variance的值,将t与variance相乘即可。
以center_size编码方式为例:
b_center_x = t_x * p_width + p_center_x
b_center_y = t_y * p_height + p_center_y
b_width = exp(t_x) * p_width
b_height = exp(t_y) * p_height
- 1
- 2
- 3
- 4
- 5
如果需要添加variance:
b_center_x = t_x *prior_variance[0]* p_width + p_center_x
b_center_y = t_y *prior_variance[1] * p_height + p_center_y
b_width = exp(prior_variance[2] * t_x) * p_width
b_height = exp(prior_variance[3] * t_y) * p_height
- 1
- 2
- 3
- 4
- 5
据此分别计算出b_xmin, b_ymin, b_xmax, b_ymax即可。详细可参见代码
3) Non-Maximum Suppression非极大值抑制
检测算法给出的box往往有很多,如下图所示,多个检测框其实框出的是一个目标,nms就是一个目标保留一个最优框。抑制的过程是一个迭代-遍历-消除的过程。
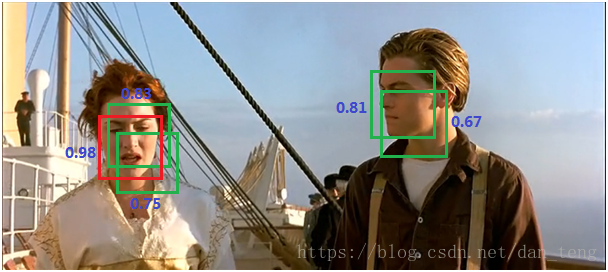
(图片来源:https://blog.csdn.net/shuzfan/article/details/52711706)
给定处理前的集合:预选结合,处理后的集合keep集合
首先,将预选集合所有框按照得分高低进行排序,选中得分最高的框,从预选集合移出放到keep集合中;
接下来进行迭代:
*从当前预选集合移出得分最高的框,用它与keep集合每个框计算交并比:
*超过阈值说明二者重复很多,框住的应该是同一个东西,不放到keep集合中;
*如果与keep集合中每个框交并比都小于阈值,说明当前框框住的是一个新目标,应该放到keep中。
迭代下去,直到预选集合为空,那么keep集合中留下的就是检出的所有目标的检测框。
jaccard overlap
这里补充介绍一下ssd网络中的jaccard overlap。
jaccard overlap其实就是交并比,简单说起来就是两个检测框重合的面积(相交的部分)除以两个检测框并在一起的面积(面积之和减去重合部分),用公式表示为
J为0说明两个框一点没有重合,为1说明完全重合
4)按照输出大小要求输出结果
代码详解:
注意:这里给出了detection_output_layer.cpp中的代码,但是代码里用到了一些函数,这些函数放在了
ssd/src/caffe/util/bbox_util.cpp中
#include <algorithm>
#include <fstream> // NOLINT(readability/streams)
#include <map>
#include <string>
#include <utility>
#include <vector>
#include "boost/filesystem.hpp"
#include "boost/foreach.hpp"
#include "caffe/layers/detection_output_layer.hpp"
namespace caffe {
template <typename Dtype>
void DetectionOutputLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
const DetectionOutputParameter& detection_output_param =
this->layer_param_.detection_output_param();
CHECK(detection_output_param.has_num_classes()) << "Must specify num_classes";
num_classes_ = detection_output_param.num_classes();// 类别数量
share_location_ = detection_output_param.share_location();
num_loc_classes_ = share_location_ ? 1 : num_classes_;
background_label_id_ = detection_output_param.background_label_id();
code_type_ = detection_output_param.code_type();// 编码类型
variance_encoded_in_target_ =
detection_output_param.variance_encoded_in_target();
keep_top_k_ = detection_output_param.keep_top_k(); // 保留框最大数量
confidence_threshold_ = detection_output_param.has_confidence_threshold() ?
detection_output_param.confidence_threshold() : -FLT_MAX;// 得分阈值
// Parameters used in nms.
nms_threshold_ = detection_output_param.nms_param().nms_threshold();
CHECK_GE(nms_threshold_, 0.) << "nms_threshold must be non negative.";
eta_ = detection_output_param.nms_param().eta();
CHECK_GT(eta_, 0.);
CHECK_LE(eta_, 1.);
top_k_ = -1;
if (detection_output_param.nms_param().has_top_k()) {
top_k_ = detection_output_param.nms_param().top_k();
}
const SaveOutputParameter& save_output_param =
detection_output_param.save_output_param();
output_directory_ = save_output_param.output_directory();
if (!output_directory_.empty()) {
if (boost::filesystem::is_directory(output_directory_)) {
boost::filesystem::remove_all(output_directory_);
}
if (!boost::filesystem::create_directories(output_directory_)) {
LOG(WARNING) << "Failed to create directory: " << output_directory_;
}
}
output_name_prefix_ = save_output_param.output_name_prefix();
need_save_ = output_directory_ == "" ? false : true;
output_format_ = save_output_param.output_format();
if (save_output_param.has_label_map_file()) {
string label_map_file = save_output_param.label_map_file();
if (label_map_file.empty()) {
// Ignore saving if there is no label_map_file provided.
LOG(WARNING) << "Provide label_map_file if output results to files.";
need_save_ = false;
} else {
LabelMap label_map;
CHECK(ReadProtoFromTextFile(label_map_file, &label_map))
<< "Failed to read label map file: " << label_map_file;
CHECK(MapLabelToName(label_map, true, &label_to_name_))
<< "Failed to convert label to name.";
CHECK(MapLabelToDisplayName(label_map, true, &label_to_display_name_))
<< "Failed to convert label to display name.";
}
} else {
need_save_ = false;
}
if (save_output_param.has_name_size_file()) {
string name_size_file = save_output_param.name_size_file();
if (name_size_file.empty()) {
// Ignore saving if there is no name_size_file provided.
LOG(WARNING) << "Provide name_size_file if output results to files.";
need_save_ = false;
} else {
std::ifstream infile(name_size_file.c_str());
CHECK(infile.good())
<< "Failed to open name size file: " << name_size_file;
// The file is in the following format:
// name height width
// ...
string name;
int height, width;
while (infile >> name >> height >> width) {
names_.push_back(name);
sizes_.push_back(std::make_pair(height, width));
}
infile.close();
if (save_output_param.has_num_test_image()) {
num_test_image_ = save_output_param.num_test_image();
} else {
num_test_image_ = names_.size();
}
CHECK_LE(num_test_image_, names_.size());
}
} else {
need_save_ = false;
}
has_resize_ = save_output_param.has_resize_param();
if (has_resize_) {
resize_param_ = save_output_param.resize_param();
}
name_count_ = 0;
visualize_ = detection_output_param.visualize();
if (visualize_) {
visualize_threshold_ = 0.6;
if (detection_output_param.has_visualize_threshold()) {
visualize_threshold_ = detection_output_param.visualize_threshold();
}
data_transformer_.reset(
new DataTransformer<Dtype>(this->layer_param_.transform_param(),
this->phase_));
data_transformer_->InitRand();
save_file_ = detection_output_param.save_file();
}
bbox_preds_.ReshapeLike(*(bottom[0]));
if (!share_location_) {
bbox_permute_.ReshapeLike(*(bottom[0]));
}
conf_permute_.ReshapeLike(*(bottom[1]));
}
// 输出大小为[1, 1, x, 7]
// 最后一维7指的是:[image_id, label, confidence, xmin, ymin, xmax, ymax]
template <typename Dtype>
void DetectionOutputLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
if (need_save_) {
CHECK_LE(name_count_, names_.size());
if (name_count_ % num_test_image_ == 0) {
// Clean all outputs.
if (output_format_ == "VOC") {
boost::filesystem::path output_directory(output_directory_);
for (map<int, string>::iterator it = label_to_name_.begin();
it != label_to_name_.end(); ++it) {
if (it->first == background_label_id_) {
continue;
}
std::ofstream outfile;
boost::filesystem::path file(
output_name_prefix_ + it->second + ".txt");
boost::filesystem::path out_file = output_directory / file;
outfile.open(out_file.string().c_str(), std::ofstream::out);
}
}
}
}
CHECK_EQ(bottom[0]->num(), bottom[1]->num());
if (bbox_preds_.num() != bottom[0]->num() ||
bbox_preds_.count(1) != bottom[0]->count(1)) {
bbox_preds_.ReshapeLike(*(bottom[0]));
}
if (!share_location_ && (bbox_permute_.num() != bottom[0]->num() ||
bbox_permute_.count(1) != bottom[0]->count(1))) {
bbox_permute_.ReshapeLike(*(bottom[0]));
}
if (conf_permute_.num() != bottom[1]->num() ||
conf_permute_.count(1) != bottom[1]->count(1)) {
conf_permute_.ReshapeLike(*(bottom[1]));
}
num_priors_ = bottom[2]->height() / 4;
CHECK_EQ(num_priors_ * num_loc_classes_ * 4, bottom[0]->channels())
<< "Number of priors must match number of location predictions.";
CHECK_EQ(num_priors_ * num_classes_, bottom[1]->channels())
<< "Number of priors must match number of confidence predictions.";
// num() and channels() are 1.
vector<int> top_shape(2, 1);
// Since the number of bboxes to be kept is unknown before nms, we manually
// set it to (fake) 1.
top_shape.push_back(1);
// Each row is a 7 dimension vector, which stores
// [image_id, label, confidence, xmin, ymin, xmax, ymax]
top_shape.push_back(7);
top[0]->Reshape(top_shape);
}
template <typename Dtype>
void DetectionOutputLayer<Dtype>::Forward_cpu(
const vector<Blob<Dtype>*>& bottom, const vector<Blob<Dtype>*>& top) {
const Dtype* loc_data = bottom[0]->cpu_data();
const Dtype* conf_data = bottom[1]->cpu_data();
const Dtype* prior_data = bottom[2]->cpu_data();
const int num = bottom[0]->num();
// Retrieve all location predictions.
vector<LabelBBox> all_loc_preds;
// 处理偏移量数据
GetLocPredictions(loc_data, num, num_priors_, num_loc_classes_,
share_location_, &all_loc_preds);
// Retrieve all confidences.
vector<map<int, vector<float> > > all_conf_scores;
// 处理得分数据
GetConfidenceScores(conf_data, num, num_priors_, num_classes_,
&all_conf_scores);
// Retrieve all prior bboxes. It is same within a batch since we assume all
// images in a batch are of same dimension.
vector<NormalizedBBox> prior_bboxes;
vector<vector<float> > prior_variances;
// 处理预选框数据
GetPriorBBoxes(prior_data, num_priors_, &prior_bboxes, &prior_variances);
// Decode all loc predictions to bboxes.
vector<LabelBBox> all_decode_bboxes;
const bool clip_bbox = false;
// 解码
DecodeBBoxesAll(all_loc_preds, prior_bboxes, prior_variances, num,
share_location_, num_loc_classes_, background_label_id_,
code_type_, variance_encoded_in_target_, clip_bbox,
&all_decode_bboxes);
int num_kept = 0;
vector<map<int, vector<int> > > all_indices;
for (int i = 0; i < num; ++i) {
const LabelBBox& decode_bboxes = all_decode_bboxes[i];
const map<int, vector<float> >& conf_scores = all_conf_scores[i];
map<int, vector<int> > indices;
int num_det = 0;
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
// Ignore background class.
continue;
}
if (conf_scores.find(c) == conf_scores.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find confidence predictions for label " << c;
}
const vector<float>& scores = conf_scores.find(c)->second;
int label = share_location_ ? -1 : c;
if (decode_bboxes.find(label) == decode_bboxes.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find location predictions for label " << label;
continue;
}
const vector<NormalizedBBox>& bboxes = decode_bboxes.find(label)->second;
// 非极大值抑制
ApplyNMSFast(bboxes, scores, confidence_threshold_, nms_threshold_, eta_,
top_k_, &(indices[c]));
num_det += indices[c].size();
}
// 处理后有效数据量大于最后输出量,那就取得分最高的前keep_top_k个检测框
if (keep_top_k_ > -1 && num_det > keep_top_k_) {
vector<pair<float, pair<int, int> > > score_index_pairs;
for (map<int, vector<int> >::iterator it = indices.begin();
it != indices.end(); ++it) {
int label = it->first;
const vector<int>& label_indices = it->second;
if (conf_scores.find(label) == conf_scores.end()) {
// Something bad happened for current label.
LOG(FATAL) << "Could not find location predictions for " << label;
continue;
}
const vector<float>& scores = conf_scores.find(label)->second;
for (int j = 0; j < label_indices.size(); ++j) {
int idx = label_indices[j];
CHECK_LT(idx, scores.size());
score_index_pairs.push_back(std::make_pair(
scores[idx], std::make_pair(label, idx)));
}
}
// Keep top k results per image.
std::sort(score_index_pairs.begin(), score_index_pairs.end(),
SortScorePairDescend<pair<int, int> >);
score_index_pairs.resize(keep_top_k_);
// Store the new indices.
map<int, vector<int> > new_indices;
for (int j = 0; j < score_index_pairs.size(); ++j) {
int label = score_index_pairs[j].second.first;
int idx = score_index_pairs[j].second.second;
new_indices[label].push_back(idx);
}
all_indices.push_back(new_indices);
num_kept += keep_top_k_;
} else {
all_indices.push_back(indices);
num_kept += num_det;
}
}
vector<int> top_shape(2, 1);
top_shape.push_back(num_kept);
top_shape.push_back(7);
Dtype* top_data;
// 没有检测到目标
if (num_kept == 0) {
LOG(INFO) << "Couldn't find any detections";
top_shape[2] = num;
top[0]->Reshape(top_shape);
top_data = top[0]->mutable_cpu_data();
caffe_set<Dtype>(top[0]->count(), -1, top_data);
// Generate fake results per image.
for (int i = 0; i < num; ++i) {
top_data[0] = i;
top_data += 7;
}
} else {// 检测到目标
top[0]->Reshape(top_shape);
top_data = top[0]->mutable_cpu_data();
}
// 检测到目标的处理
int count = 0;
boost::filesystem::path output_directory(output_directory_);
for (int i = 0; i < num; ++i) {
const map<int, vector<float> >& conf_scores = all_conf_scores[i];
const LabelBBox& decode_bboxes = all_decode_bboxes[i];
for (map<int, vector<int> >::iterator it = all_indices[i].begin();
it != all_indices[i].end(); ++it) {
int label = it->first;
if (conf_scores.find(label) == conf_scores.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find confidence predictions for " << label;
continue;
}
const vector<float>& scores = conf_scores.find(label)->second;
int loc_label = share_location_ ? -1 : label;
if (decode_bboxes.find(loc_label) == decode_bboxes.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find location predictions for " << loc_label;
continue;
}
const vector<NormalizedBBox>& bboxes =
decode_bboxes.find(loc_label)->second;
vector<int>& indices = it->second;
if (need_save_) {
CHECK(label_to_name_.find(label) != label_to_name_.end())
<< "Cannot find label: " << label << " in the label map.";
CHECK_LT(name_count_, names_.size());
}
// 将数据放入输出数据域中
for (int j = 0; j < indices.size(); ++j) {
int idx = indices[j];
top_data[count * 7] = i;
top_data[count * 7 + 1] = label;
top_data[count * 7 + 2] = scores[idx];
const NormalizedBBox& bbox = bboxes[idx];
top_data[count * 7 + 3] = bbox.xmin();
top_data[count * 7 + 4] = bbox.ymin();
top_data[count * 7 + 5] = bbox.xmax();
top_data[count * 7 + 6] = bbox.ymax();
if (need_save_) {
NormalizedBBox out_bbox;
OutputBBox(bbox, sizes_[name_count_], has_resize_, resize_param_,
&out_bbox);
float score = top_data[count * 7 + 2];
float xmin = out_bbox.xmin();
float ymin = out_bbox.ymin();
float xmax = out_bbox.xmax();
float ymax = out_bbox.ymax();
ptree pt_xmin, pt_ymin, pt_width, pt_height;
pt_xmin.put<float>("", round(xmin * 100) / 100.);
pt_ymin.put<float>("", round(ymin * 100) / 100.);
pt_width.put<float>("", round((xmax - xmin) * 100) / 100.);
pt_height.put<float>("", round((ymax - ymin) * 100) / 100.);
ptree cur_bbox;
cur_bbox.push_back(std::make_pair("", pt_xmin));
cur_bbox.push_back(std::make_pair("", pt_ymin));
cur_bbox.push_back(std::make_pair("", pt_width));
cur_bbox.push_back(std::make_pair("", pt_height));
ptree cur_det;
cur_det.put("image_id", names_[name_count_]);
if (output_format_ == "ILSVRC") {
cur_det.put<int>("category_id", label);
} else {
cur_det.put("category_id", label_to_name_[label].c_str());
}
cur_det.add_child("bbox", cur_bbox);
cur_det.put<float>("score", score);
detections_.push_back(std::make_pair("", cur_det));
}
++count;
}
}
if (need_save_) {
++name_count_;
if (name_count_ % num_test_image_ == 0) {
if (output_format_ == "VOC") {
map<string, std::ofstream*> outfiles;
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
continue;
}
string label_name = label_to_name_[c];
boost::filesystem::path file(
output_name_prefix_ + label_name + ".txt");
boost::filesystem::path out_file = output_directory / file;
outfiles[label_name] = new std::ofstream(out_file.string().c_str(),
std::ofstream::out);
}
BOOST_FOREACH(ptree::value_type &det, detections_.get_child("")) {
ptree pt = det.second;
string label_name = pt.get<string>("category_id");
if (outfiles.find(label_name) == outfiles.end()) {
std::cout << "Cannot find " << label_name << std::endl;
continue;
}
string image_name = pt.get<string>("image_id");
float score = pt.get<float>("score");
vector<int> bbox;
BOOST_FOREACH(ptree::value_type &elem, pt.get_child("bbox")) {
bbox.push_back(static_cast<int>(elem.second.get_value<float>()));
}
*(outfiles[label_name]) << image_name;
*(outfiles[label_name]) << " " << score;
*(outfiles[label_name]) << " " << bbox[0] << " " << bbox[1];
*(outfiles[label_name]) << " " << bbox[0] + bbox[2];
*(outfiles[label_name]) << " " << bbox[1] + bbox[3];
*(outfiles[label_name]) << std::endl;
}
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
continue;
}
string label_name = label_to_name_[c];
outfiles[label_name]->flush();
outfiles[label_name]->close();
delete outfiles[label_name];
}
} else if (output_format_ == "COCO") {
boost::filesystem::path output_directory(output_directory_);
boost::filesystem::path file(output_name_prefix_ + ".json");
boost::filesystem::path out_file = output_directory / file;
std::ofstream outfile;
outfile.open(out_file.string().c_str(), std::ofstream::out);
boost::regex exp("\"(null|true|false|-?[0-9]+(\\.[0-9]+)?)\"");
ptree output;
output.add_child("detections", detections_);
std::stringstream ss;
write_json(ss, output);
std::string rv = boost::regex_replace(ss.str(), exp, "$1");
outfile << rv.substr(rv.find("["), rv.rfind("]") - rv.find("["))
<< std::endl << "]" << std::endl;
} else if (output_format_ == "ILSVRC") {
boost::filesystem::path output_directory(output_directory_);
boost::filesystem::path file(output_name_prefix_ + ".txt");
boost::filesystem::path out_file = output_directory / file;
std::ofstream outfile;
outfile.open(out_file.string().c_str(), std::ofstream::out);
BOOST_FOREACH(ptree::value_type &det, detections_.get_child("")) {
ptree pt = det.second;
int label = pt.get<int>("category_id");
string image_name = pt.get<string>("image_id");
float score = pt.get<float>("score");
vector<int> bbox;
BOOST_FOREACH(ptree::value_type &elem, pt.get_child("bbox")) {
bbox.push_back(static_cast<int>(elem.second.get_value<float>()));
}
outfile << image_name << " " << label << " " << score;
outfile << " " << bbox[0] << " " << bbox[1];
outfile << " " << bbox[0] + bbox[2];
outfile << " " << bbox[1] + bbox[3];
outfile << std::endl;
}
}
name_count_ = 0;
detections_.clear();
}
}
}
if (visualize_) {
#ifdef USE_OPENCV
vector<cv::Mat> cv_imgs;
this->data_transformer_->TransformInv(bottom[3], &cv_imgs);
vector<cv::Scalar> colors = GetColors(label_to_display_name_.size());
VisualizeBBox(cv_imgs, top[0], visualize_threshold_, colors,
label_to_display_name_, save_file_);
#endif // USE_OPENCV
}
}
#ifdef CPU_ONLY
STUB_GPU_FORWARD(DetectionOutputLayer, Forward);
#endif
INSTANTIATE_CLASS(DetectionOutputLayer);
REGISTER_LAYER_CLASS(DetectionOutput);
} // namespace caffe
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
caffe定义
message DetectionOutputParameter {
// 预测种类
optional uint32 num_classes = 1;
// 不同类别之间是否共享框位置
optional bool share_location = 2 [default = true];
// Background label id. 无则为 -1.
optional int32 background_label_id = 3 [default = 0];
// nms参数
optional NonMaximumSuppressionParameter nms_param = 4;
// Parameters used for saving detection results.
optional SaveOutputParameter save_output_param = 5;
// bbox的编解码方式
optional PriorBoxParameter.CodeType code_type = 6 [default = CORNER];
// variance是否被编码
optional bool variance_encoded_in_target = 8 [default = false];
// 每张图片在nms处理后保留框的数量
// -1 表示保留所有框
optional int32 keep_top_k = 7 [default = -1];
// 得分阈值
optional float confidence_threshold = 9;
// If true, visualize the detection results.
optional bool visualize = 10 [default = false];
// The threshold used to visualize the detection results.
optional float visualize_threshold = 11;
// If provided, save outputs to video file.
optional string save_file = 12;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
<link rel="stylesheet" href="https://csdnimg.cn/release/phoenix/template/css/markdown_views-ea0013b516.css">
</div>
ssd网络详解之detection out layer
本文原创,转载请引用https://blog.csdn.net/dan_teng/article/details/81561783
闲话少说,本文基本结构:首先介绍detection out 这一层的基本理解,之后给出ssd所有代码的详细注释,最后给出caffe中该层各个参数的定义和默认值。
detection out layer是ssd网络最后一层,用于整合预选框、预选框偏移以及得分三项结果,最终输出满足条件的目标检测框、目标的label和得分。
输入方面,mbox_priorbox是网络各个priorbox层输出concat后的结果(priorbox解析点这里),相当于把所有预选框放到一起;mbox_loc是在预选框的基础上的偏移量;mbox_conf_flatten就是每个类别在各个框上的得分。
输出大小为[1, 1, x, 7],其中x是最后保留的框的个数,最后一维存放的数据为:
[image_id, label, confidence, xmin, ymin, xmax, ymax]
计算思路:
1)对bottom层的location、confidence和priorbox进行解析,放到vector中
2)对每个priorbox进行解码。所谓解码其实就是整合输入层。前面说到过了,输出需要给出每个目标的检测框,但是输入是预选框和偏移量,这里要做的就是计算出最终的检测框。解码需要考虑priorbox编码方式,共三种情况。
假设检测框用b表示(存储内容:b_xmin, b_ymin, b_xmax, b_ymax),预选框用p表示(存储内容:p_xmin, p_ymin, p_xmax, p_ymax),偏移量用t表示(存储内容:t_x, t_y, t_height, t_width)。
b和p的宽高分别用x和y的最大最小值减一下得到,中心点的值用最大最小值相加除以2得到。
那么在每种类型中,编码公式分别为:
CodeType_CORNER:
t = b - p(每个维度一样)- 1
- 2
CodeType_CENTER_SIZE:
t_x = (b_center_x – p_center_x) / p_width (t_y同理) t_height = log(b_height / p_height) (t_width同理)- 1
- 2
- 3
CodeType_CORNER_SIZE:
t_x = (b_x – p_x) / p_width t_y = (b_y – p_y) / p_height- 1
- 2
- 3
解码时求取b的各个值就可以。如果需要添加variance的值,将t与variance相乘即可。
以center_size编码方式为例:
b_center_x = t_x * p_width + p_center_x
b_center_y = t_y * p_height + p_center_y
b_width = exp(t_x) * p_width
b_height = exp(t_y) * p_height
- 1
- 2
- 3
- 4
- 5
如果需要添加variance:
b_center_x = t_x *prior_variance[0]* p_width + p_center_x
b_center_y = t_y *prior_variance[1] * p_height + p_center_y
b_width = exp(prior_variance[2] * t_x) * p_width
b_height = exp(prior_variance[3] * t_y) * p_height
- 1
- 2
- 3
- 4
- 5
据此分别计算出b_xmin, b_ymin, b_xmax, b_ymax即可。详细可参见代码
3) Non-Maximum Suppression非极大值抑制
检测算法给出的box往往有很多,如下图所示,多个检测框其实框出的是一个目标,nms就是一个目标保留一个最优框。抑制的过程是一个迭代-遍历-消除的过程。
(图片来源:https://blog.csdn.net/shuzfan/article/details/52711706)
给定处理前的集合:预选结合,处理后的集合keep集合
首先,将预选集合所有框按照得分高低进行排序,选中得分最高的框,从预选集合移出放到keep集合中;
接下来进行迭代:
*从当前预选集合移出得分最高的框,用它与keep集合每个框计算交并比:
*超过阈值说明二者重复很多,框住的应该是同一个东西,不放到keep集合中;
*如果与keep集合中每个框交并比都小于阈值,说明当前框框住的是一个新目标,应该放到keep中。
迭代下去,直到预选集合为空,那么keep集合中留下的就是检出的所有目标的检测框。
jaccard overlap
这里补充介绍一下ssd网络中的jaccard overlap。
jaccard overlap其实就是交并比,简单说起来就是两个检测框重合的面积(相交的部分)除以两个检测框并在一起的面积(面积之和减去重合部分),用公式表示为
J为0说明两个框一点没有重合,为1说明完全重合
4)按照输出大小要求输出结果
代码详解:
注意:这里给出了detection_output_layer.cpp中的代码,但是代码里用到了一些函数,这些函数放在了
ssd/src/caffe/util/bbox_util.cpp中
#include <algorithm>
#include <fstream> // NOLINT(readability/streams)
#include <map>
#include <string>
#include <utility>
#include <vector>
#include "boost/filesystem.hpp"
#include "boost/foreach.hpp"
#include "caffe/layers/detection_output_layer.hpp"
namespace caffe {
template <typename Dtype>
void DetectionOutputLayer<Dtype>::LayerSetUp(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
const DetectionOutputParameter& detection_output_param =
this->layer_param_.detection_output_param();
CHECK(detection_output_param.has_num_classes()) << "Must specify num_classes";
num_classes_ = detection_output_param.num_classes();// 类别数量
share_location_ = detection_output_param.share_location();
num_loc_classes_ = share_location_ ? 1 : num_classes_;
background_label_id_ = detection_output_param.background_label_id();
code_type_ = detection_output_param.code_type();// 编码类型
variance_encoded_in_target_ =
detection_output_param.variance_encoded_in_target();
keep_top_k_ = detection_output_param.keep_top_k(); // 保留框最大数量
confidence_threshold_ = detection_output_param.has_confidence_threshold() ?
detection_output_param.confidence_threshold() : -FLT_MAX;// 得分阈值
// Parameters used in nms.
nms_threshold_ = detection_output_param.nms_param().nms_threshold();
CHECK_GE(nms_threshold_, 0.) << "nms_threshold must be non negative.";
eta_ = detection_output_param.nms_param().eta();
CHECK_GT(eta_, 0.);
CHECK_LE(eta_, 1.);
top_k_ = -1;
if (detection_output_param.nms_param().has_top_k()) {
top_k_ = detection_output_param.nms_param().top_k();
}
const SaveOutputParameter& save_output_param =
detection_output_param.save_output_param();
output_directory_ = save_output_param.output_directory();
if (!output_directory_.empty()) {
if (boost::filesystem::is_directory(output_directory_)) {
boost::filesystem::remove_all(output_directory_);
}
if (!boost::filesystem::create_directories(output_directory_)) {
LOG(WARNING) << "Failed to create directory: " << output_directory_;
}
}
output_name_prefix_ = save_output_param.output_name_prefix();
need_save_ = output_directory_ == "" ? false : true;
output_format_ = save_output_param.output_format();
if (save_output_param.has_label_map_file()) {
string label_map_file = save_output_param.label_map_file();
if (label_map_file.empty()) {
// Ignore saving if there is no label_map_file provided.
LOG(WARNING) << "Provide label_map_file if output results to files.";
need_save_ = false;
} else {
LabelMap label_map;
CHECK(ReadProtoFromTextFile(label_map_file, &label_map))
<< "Failed to read label map file: " << label_map_file;
CHECK(MapLabelToName(label_map, true, &label_to_name_))
<< "Failed to convert label to name.";
CHECK(MapLabelToDisplayName(label_map, true, &label_to_display_name_))
<< "Failed to convert label to display name.";
}
} else {
need_save_ = false;
}
if (save_output_param.has_name_size_file()) {
string name_size_file = save_output_param.name_size_file();
if (name_size_file.empty()) {
// Ignore saving if there is no name_size_file provided.
LOG(WARNING) << "Provide name_size_file if output results to files.";
need_save_ = false;
} else {
std::ifstream infile(name_size_file.c_str());
CHECK(infile.good())
<< "Failed to open name size file: " << name_size_file;
// The file is in the following format:
// name height width
// ...
string name;
int height, width;
while (infile >> name >> height >> width) {
names_.push_back(name);
sizes_.push_back(std::make_pair(height, width));
}
infile.close();
if (save_output_param.has_num_test_image()) {
num_test_image_ = save_output_param.num_test_image();
} else {
num_test_image_ = names_.size();
}
CHECK_LE(num_test_image_, names_.size());
}
} else {
need_save_ = false;
}
has_resize_ = save_output_param.has_resize_param();
if (has_resize_) {
resize_param_ = save_output_param.resize_param();
}
name_count_ = 0;
visualize_ = detection_output_param.visualize();
if (visualize_) {
visualize_threshold_ = 0.6;
if (detection_output_param.has_visualize_threshold()) {
visualize_threshold_ = detection_output_param.visualize_threshold();
}
data_transformer_.reset(
new DataTransformer<Dtype>(this->layer_param_.transform_param(),
this->phase_));
data_transformer_->InitRand();
save_file_ = detection_output_param.save_file();
}
bbox_preds_.ReshapeLike(*(bottom[0]));
if (!share_location_) {
bbox_permute_.ReshapeLike(*(bottom[0]));
}
conf_permute_.ReshapeLike(*(bottom[1]));
}
// 输出大小为[1, 1, x, 7]
// 最后一维7指的是:[image_id, label, confidence, xmin, ymin, xmax, ymax]
template <typename Dtype>
void DetectionOutputLayer<Dtype>::Reshape(const vector<Blob<Dtype>*>& bottom,
const vector<Blob<Dtype>*>& top) {
if (need_save_) {
CHECK_LE(name_count_, names_.size());
if (name_count_ % num_test_image_ == 0) {
// Clean all outputs.
if (output_format_ == "VOC") {
boost::filesystem::path output_directory(output_directory_);
for (map<int, string>::iterator it = label_to_name_.begin();
it != label_to_name_.end(); ++it) {
if (it->first == background_label_id_) {
continue;
}
std::ofstream outfile;
boost::filesystem::path file(
output_name_prefix_ + it->second + ".txt");
boost::filesystem::path out_file = output_directory / file;
outfile.open(out_file.string().c_str(), std::ofstream::out);
}
}
}
}
CHECK_EQ(bottom[0]->num(), bottom[1]->num());
if (bbox_preds_.num() != bottom[0]->num() ||
bbox_preds_.count(1) != bottom[0]->count(1)) {
bbox_preds_.ReshapeLike(*(bottom[0]));
}
if (!share_location_ && (bbox_permute_.num() != bottom[0]->num() ||
bbox_permute_.count(1) != bottom[0]->count(1))) {
bbox_permute_.ReshapeLike(*(bottom[0]));
}
if (conf_permute_.num() != bottom[1]->num() ||
conf_permute_.count(1) != bottom[1]->count(1)) {
conf_permute_.ReshapeLike(*(bottom[1]));
}
num_priors_ = bottom[2]->height() / 4;
CHECK_EQ(num_priors_ * num_loc_classes_ * 4, bottom[0]->channels())
<< "Number of priors must match number of location predictions.";
CHECK_EQ(num_priors_ * num_classes_, bottom[1]->channels())
<< "Number of priors must match number of confidence predictions.";
// num() and channels() are 1.
vector<int> top_shape(2, 1);
// Since the number of bboxes to be kept is unknown before nms, we manually
// set it to (fake) 1.
top_shape.push_back(1);
// Each row is a 7 dimension vector, which stores
// [image_id, label, confidence, xmin, ymin, xmax, ymax]
top_shape.push_back(7);
top[0]->Reshape(top_shape);
}
template <typename Dtype>
void DetectionOutputLayer<Dtype>::Forward_cpu(
const vector<Blob<Dtype>*>& bottom, const vector<Blob<Dtype>*>& top) {
const Dtype* loc_data = bottom[0]->cpu_data();
const Dtype* conf_data = bottom[1]->cpu_data();
const Dtype* prior_data = bottom[2]->cpu_data();
const int num = bottom[0]->num();
// Retrieve all location predictions.
vector<LabelBBox> all_loc_preds;
// 处理偏移量数据
GetLocPredictions(loc_data, num, num_priors_, num_loc_classes_,
share_location_, &all_loc_preds);
// Retrieve all confidences.
vector<map<int, vector<float> > > all_conf_scores;
// 处理得分数据
GetConfidenceScores(conf_data, num, num_priors_, num_classes_,
&all_conf_scores);
// Retrieve all prior bboxes. It is same within a batch since we assume all
// images in a batch are of same dimension.
vector<NormalizedBBox> prior_bboxes;
vector<vector<float> > prior_variances;
// 处理预选框数据
GetPriorBBoxes(prior_data, num_priors_, &prior_bboxes, &prior_variances);
// Decode all loc predictions to bboxes.
vector<LabelBBox> all_decode_bboxes;
const bool clip_bbox = false;
// 解码
DecodeBBoxesAll(all_loc_preds, prior_bboxes, prior_variances, num,
share_location_, num_loc_classes_, background_label_id_,
code_type_, variance_encoded_in_target_, clip_bbox,
&all_decode_bboxes);
int num_kept = 0;
vector<map<int, vector<int> > > all_indices;
for (int i = 0; i < num; ++i) {
const LabelBBox& decode_bboxes = all_decode_bboxes[i];
const map<int, vector<float> >& conf_scores = all_conf_scores[i];
map<int, vector<int> > indices;
int num_det = 0;
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
// Ignore background class.
continue;
}
if (conf_scores.find(c) == conf_scores.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find confidence predictions for label " << c;
}
const vector<float>& scores = conf_scores.find(c)->second;
int label = share_location_ ? -1 : c;
if (decode_bboxes.find(label) == decode_bboxes.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find location predictions for label " << label;
continue;
}
const vector<NormalizedBBox>& bboxes = decode_bboxes.find(label)->second;
// 非极大值抑制
ApplyNMSFast(bboxes, scores, confidence_threshold_, nms_threshold_, eta_,
top_k_, &(indices[c]));
num_det += indices[c].size();
}
// 处理后有效数据量大于最后输出量,那就取得分最高的前keep_top_k个检测框
if (keep_top_k_ > -1 && num_det > keep_top_k_) {
vector<pair<float, pair<int, int> > > score_index_pairs;
for (map<int, vector<int> >::iterator it = indices.begin();
it != indices.end(); ++it) {
int label = it->first;
const vector<int>& label_indices = it->second;
if (conf_scores.find(label) == conf_scores.end()) {
// Something bad happened for current label.
LOG(FATAL) << "Could not find location predictions for " << label;
continue;
}
const vector<float>& scores = conf_scores.find(label)->second;
for (int j = 0; j < label_indices.size(); ++j) {
int idx = label_indices[j];
CHECK_LT(idx, scores.size());
score_index_pairs.push_back(std::make_pair(
scores[idx], std::make_pair(label, idx)));
}
}
// Keep top k results per image.
std::sort(score_index_pairs.begin(), score_index_pairs.end(),
SortScorePairDescend<pair<int, int> >);
score_index_pairs.resize(keep_top_k_);
// Store the new indices.
map<int, vector<int> > new_indices;
for (int j = 0; j < score_index_pairs.size(); ++j) {
int label = score_index_pairs[j].second.first;
int idx = score_index_pairs[j].second.second;
new_indices[label].push_back(idx);
}
all_indices.push_back(new_indices);
num_kept += keep_top_k_;
} else {
all_indices.push_back(indices);
num_kept += num_det;
}
}
vector<int> top_shape(2, 1);
top_shape.push_back(num_kept);
top_shape.push_back(7);
Dtype* top_data;
// 没有检测到目标
if (num_kept == 0) {
LOG(INFO) << "Couldn't find any detections";
top_shape[2] = num;
top[0]->Reshape(top_shape);
top_data = top[0]->mutable_cpu_data();
caffe_set<Dtype>(top[0]->count(), -1, top_data);
// Generate fake results per image.
for (int i = 0; i < num; ++i) {
top_data[0] = i;
top_data += 7;
}
} else {// 检测到目标
top[0]->Reshape(top_shape);
top_data = top[0]->mutable_cpu_data();
}
// 检测到目标的处理
int count = 0;
boost::filesystem::path output_directory(output_directory_);
for (int i = 0; i < num; ++i) {
const map<int, vector<float> >& conf_scores = all_conf_scores[i];
const LabelBBox& decode_bboxes = all_decode_bboxes[i];
for (map<int, vector<int> >::iterator it = all_indices[i].begin();
it != all_indices[i].end(); ++it) {
int label = it->first;
if (conf_scores.find(label) == conf_scores.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find confidence predictions for " << label;
continue;
}
const vector<float>& scores = conf_scores.find(label)->second;
int loc_label = share_location_ ? -1 : label;
if (decode_bboxes.find(loc_label) == decode_bboxes.end()) {
// Something bad happened if there are no predictions for current label.
LOG(FATAL) << "Could not find location predictions for " << loc_label;
continue;
}
const vector<NormalizedBBox>& bboxes =
decode_bboxes.find(loc_label)->second;
vector<int>& indices = it->second;
if (need_save_) {
CHECK(label_to_name_.find(label) != label_to_name_.end())
<< "Cannot find label: " << label << " in the label map.";
CHECK_LT(name_count_, names_.size());
}
// 将数据放入输出数据域中
for (int j = 0; j < indices.size(); ++j) {
int idx = indices[j];
top_data[count * 7] = i;
top_data[count * 7 + 1] = label;
top_data[count * 7 + 2] = scores[idx];
const NormalizedBBox& bbox = bboxes[idx];
top_data[count * 7 + 3] = bbox.xmin();
top_data[count * 7 + 4] = bbox.ymin();
top_data[count * 7 + 5] = bbox.xmax();
top_data[count * 7 + 6] = bbox.ymax();
if (need_save_) {
NormalizedBBox out_bbox;
OutputBBox(bbox, sizes_[name_count_], has_resize_, resize_param_,
&out_bbox);
float score = top_data[count * 7 + 2];
float xmin = out_bbox.xmin();
float ymin = out_bbox.ymin();
float xmax = out_bbox.xmax();
float ymax = out_bbox.ymax();
ptree pt_xmin, pt_ymin, pt_width, pt_height;
pt_xmin.put<float>("", round(xmin * 100) / 100.);
pt_ymin.put<float>("", round(ymin * 100) / 100.);
pt_width.put<float>("", round((xmax - xmin) * 100) / 100.);
pt_height.put<float>("", round((ymax - ymin) * 100) / 100.);
ptree cur_bbox;
cur_bbox.push_back(std::make_pair("", pt_xmin));
cur_bbox.push_back(std::make_pair("", pt_ymin));
cur_bbox.push_back(std::make_pair("", pt_width));
cur_bbox.push_back(std::make_pair("", pt_height));
ptree cur_det;
cur_det.put("image_id", names_[name_count_]);
if (output_format_ == "ILSVRC") {
cur_det.put<int>("category_id", label);
} else {
cur_det.put("category_id", label_to_name_[label].c_str());
}
cur_det.add_child("bbox", cur_bbox);
cur_det.put<float>("score", score);
detections_.push_back(std::make_pair("", cur_det));
}
++count;
}
}
if (need_save_) {
++name_count_;
if (name_count_ % num_test_image_ == 0) {
if (output_format_ == "VOC") {
map<string, std::ofstream*> outfiles;
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
continue;
}
string label_name = label_to_name_[c];
boost::filesystem::path file(
output_name_prefix_ + label_name + ".txt");
boost::filesystem::path out_file = output_directory / file;
outfiles[label_name] = new std::ofstream(out_file.string().c_str(),
std::ofstream::out);
}
BOOST_FOREACH(ptree::value_type &det, detections_.get_child("")) {
ptree pt = det.second;
string label_name = pt.get<string>("category_id");
if (outfiles.find(label_name) == outfiles.end()) {
std::cout << "Cannot find " << label_name << std::endl;
continue;
}
string image_name = pt.get<string>("image_id");
float score = pt.get<float>("score");
vector<int> bbox;
BOOST_FOREACH(ptree::value_type &elem, pt.get_child("bbox")) {
bbox.push_back(static_cast<int>(elem.second.get_value<float>()));
}
*(outfiles[label_name]) << image_name;
*(outfiles[label_name]) << " " << score;
*(outfiles[label_name]) << " " << bbox[0] << " " << bbox[1];
*(outfiles[label_name]) << " " << bbox[0] + bbox[2];
*(outfiles[label_name]) << " " << bbox[1] + bbox[3];
*(outfiles[label_name]) << std::endl;
}
for (int c = 0; c < num_classes_; ++c) {
if (c == background_label_id_) {
continue;
}
string label_name = label_to_name_[c];
outfiles[label_name]->flush();
outfiles[label_name]->close();
delete outfiles[label_name];
}
} else if (output_format_ == "COCO") {
boost::filesystem::path output_directory(output_directory_);
boost::filesystem::path file(output_name_prefix_ + ".json");
boost::filesystem::path out_file = output_directory / file;
std::ofstream outfile;
outfile.open(out_file.string().c_str(), std::ofstream::out);
boost::regex exp("\"(null|true|false|-?[0-9]+(\\.[0-9]+)?)\"");
ptree output;
output.add_child("detections", detections_);
std::stringstream ss;
write_json(ss, output);
std::string rv = boost::regex_replace(ss.str(), exp, "$1");
outfile << rv.substr(rv.find("["), rv.rfind("]") - rv.find("["))
<< std::endl << "]" << std::endl;
} else if (output_format_ == "ILSVRC") {
boost::filesystem::path output_directory(output_directory_);
boost::filesystem::path file(output_name_prefix_ + ".txt");
boost::filesystem::path out_file = output_directory / file;
std::ofstream outfile;
outfile.open(out_file.string().c_str(), std::ofstream::out);
BOOST_FOREACH(ptree::value_type &det, detections_.get_child("")) {
ptree pt = det.second;
int label = pt.get<int>("category_id");
string image_name = pt.get<string>("image_id");
float score = pt.get<float>("score");
vector<int> bbox;
BOOST_FOREACH(ptree::value_type &elem, pt.get_child("bbox")) {
bbox.push_back(static_cast<int>(elem.second.get_value<float>()));
}
outfile << image_name << " " << label << " " << score;
outfile << " " << bbox[0] << " " << bbox[1];
outfile << " " << bbox[0] + bbox[2];
outfile << " " << bbox[1] + bbox[3];
outfile << std::endl;
}
}
name_count_ = 0;
detections_.clear();
}
}
}
if (visualize_) {
#ifdef USE_OPENCV
vector<cv::Mat> cv_imgs;
this->data_transformer_->TransformInv(bottom[3], &cv_imgs);
vector<cv::Scalar> colors = GetColors(label_to_display_name_.size());
VisualizeBBox(cv_imgs, top[0], visualize_threshold_, colors,
label_to_display_name_, save_file_);
#endif // USE_OPENCV
}
}
#ifdef CPU_ONLY
STUB_GPU_FORWARD(DetectionOutputLayer, Forward);
#endif
INSTANTIATE_CLASS(DetectionOutputLayer);
REGISTER_LAYER_CLASS(DetectionOutput);
} // namespace caffe
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
caffe定义
message DetectionOutputParameter {
// 预测种类
optional uint32 num_classes = 1;
// 不同类别之间是否共享框位置
optional bool share_location = 2 [default = true];
// Background label id. 无则为 -1.
optional int32 background_label_id = 3 [default = 0];
// nms参数
optional NonMaximumSuppressionParameter nms_param = 4;
// Parameters used for saving detection results.
optional SaveOutputParameter save_output_param = 5;
// bbox的编解码方式
optional PriorBoxParameter.CodeType code_type = 6 [default = CORNER];
// variance是否被编码
optional bool variance_encoded_in_target = 8 [default = false];
// 每张图片在nms处理后保留框的数量
// -1 表示保留所有框
optional int32 keep_top_k = 7 [default = -1];
// 得分阈值
optional float confidence_threshold = 9;
// If true, visualize the detection results.
optional bool visualize = 10 [default = false];
// The threshold used to visualize the detection results.
optional float visualize_threshold = 11;
// If provided, save outputs to video file.
optional string save_file = 12;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
<link rel="stylesheet" href="https://csdnimg.cn/release/phoenix/template/css/markdown_views-ea0013b516.css">
</div>