cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,1,20,
param1=50,param2=30,minRadius=0,maxRadius=0)
参数编辑
image:输入8bit(灰度)图像,其内容可被函数所改变
method:Hough 变换方式,目前只支持CV_HOUGH_GRADIENT, which is basically 21HT, described in [Yuen03].
dp:寻找圆弧圆心的累计分辨率,这个参数允许创建一个比输入图像分辨率低的累加器。(这样做是因为有理由认为图像中存在的圆会自然降低到与图像宽高相同数量的范畴)。如果dp设置为1,则分辨率是相同的;如果设置为更大的值(比如2),累加器的分辨率受此影响会变小(此情况下为一半)。dp的值不能比1小。
min_dist:该参数是让算法能明显区分的两个不同圆之间的最小距离。
param1:用于Canny的边缘阀值上限,下限被置为上限的一半。
param2:累加器的阀值。
The second method-specific parameter. In case of CV_HOUGH_GRADIENT it is accumulator threshold at the center detection stage. The smaller it is, the more false circles may be detected. Circles, corresponding to the larger accumulator values, will be returned first.
min_radius:最小圆半径。
max_radius:最大圆半径。
=================================
cv2.inRange(image, lower, upper)
第一个参数:hsv指的是原图
第二个参数:lower_red指的是图像中低于这个lower_red的值,图像值变为0
第三个参数:upper_red指的是图像中高于这个upper_red的值,图像值变为0
而在lower_red~upper_red之间的值变成255
[python] view plain copy
lower_red = np.array([20, 20, 20])
[python] view plain copy
upper_red = np.array([200, 200, 200])
[python] view plain copy
mask = cv2.inRange(hsv, lower_red, upper_red) #lower20===>0,upper200==>0,lower~upper==>255
就是将低于lower_red和高于upper_red的部分分别变成0,lower_red~upper_red之间的值变成255
具体用法如下
[python] view plain copy
hsv = cv2.cvtColor(rgb_image, cv2.COLOR_BGR2HSV)
lower_red = np.array([20, 20, 20])
upper_red = np.array([200, 200, 200])
mask = cv2.inRange(hsv, lower_red, upper_red) #lower20===>0,upper200==>0
============================================
image4,contours,hierarchy= cv2.findContours(image3,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
参数:
第一个是输入图像,第二个是
轮廓检索模式,第三个是轮廓近似方法。返回值有三个,第一个是图像,第二个是轮廓,第三个是(轮廓的)层析结构。轮廓(第二个返回值)是一个Python列表,其中存储这图像中的所有轮廓。每一个轮廓都是一个Numpy 数组,包含对象边界点(x,y)的坐标。
RETR_LIST 从解释的角度来看,这中应是最简单的。它只是提取所有的轮
廓,而不去创建任何父子关系。换句话说就是“人人平等”,它们属于同一级组织轮廓。
RETR_EXTERNAL 如果你选择这种模式的话,只会返回最外边的的轮廓,
所有的子轮廓都会被忽略掉。
RETR_CCOMP 在这种模式下会返回所有的轮廓并将轮廓分为两级组织结
构。例如,一个对象的外轮廓为第1 级组织结构。而对象内部中空洞的轮廓为第2 级组织结构,空洞中的任何对象的轮廓又是第1 级组织结构。空洞的组织结构为第2 级。
RETR_TREE 终于到最后一个了,也是最完美的一个。这种模式下会返回
所有轮廓,并且创建一个完整的组织结构列表。它甚至会告诉你谁是爷爷,爸爸,儿子,孙子等。
cv2.findCountours() 的第三个参数。它到底代表什么意思呢?
上边我们已经提到轮廓是一个形状具有相同灰度值的边界。它会存贮形状
边界上所有的(x,y) 坐标。但是需要将所有的这些边界点都存储吗?这就是这个参数要告诉函数cv2.findContours 的。
这个参数如果被设置为cv2.CHAIN_APPROX_NONE,所有的边界点
都会被存储。但是我们真的需要这么多点吗?例如,当我们找的边界是一条直线时。你用需要直线上所有的点来表示直线吗?不是的,我们只需要这条直线的两个端点而已。这就是cv2.CHAIN_APPROX_SIMPLE 要做的。它会将轮廓上的冗余点都去掉,压缩轮廓,从而节省内存开支。
==========================================
cv2.drawContours(image2,contours,-1,(0,0,255),1)
参数:
它的第一个参数是原始图像,第二个参数是轮廓,一个Python 列表。第三个参数是轮廓的索引(在绘制独立轮廓是很有用,当设置为-1 时绘制所有轮廓)。接下来的参数是轮廓的颜色和厚度等。
===========================================
cv2.moments()
参数:
图像的矩可以帮助我们计算图像的质心,面积等
M = cv2.moments(cnt)
根据这些矩的值,我们可以计算出对象的重心:
cx = int(M[‘m10’]/M[‘m00’])
cy = int(M[‘m01’]/M[‘m00’])
=========================================
轮廓的面积可以使用函数cv2.contourArea() 计算得到,也可以使用矩
(0 阶矩),M[‘m00’]。
area = cv2.contourArea(cnt)
=========================================
轮廓周长
也被称为弧长。可以使用函数cv2.arcLength() 计算得到。这个函数的第二参数可以用来指定对象的形状是闭合的(True),还是打开的(一条曲
线)。
perimeter = cv2.arcLength(cnt,True)
========================================
cv2.minAreaRect(cnt)
cv2.cv.BoxPoints(rect)
参数:
使用python opencv返回点集cnt的最小外接矩形,所用函数为 cv2.minAreaRect(cnt) ,cnt是所要求最小外接矩形的点集数组或向量,这个点集不定个数。
举例说明:画一个任意四边形的最小外接矩形,其中 cnt 代表该四边形的4个顶点坐标(点集里面有4个点)
cnt = np.array([[x1,y1],[x2,y2],[x3,y3],[x4,y4]]) # 必须是array数组的形式
rect = cv2.minAreaRect(cnt) # 得到最小外接矩形的(中心(x,y), (宽,高), 旋转角度)
box = cv2.cv.BoxPoints(rect) # cv2.boxPoints(rect) for OpenCV 3.x 获取最小外接矩形的4个顶点
box = np.int0(box)
函数 cv2.minAreaRect() 返回一个Box2D结构 rect:(最小外接矩形的中心(x,y),(宽度,高度),旋转角度)。
但是要绘制这个矩形,我们需要矩形的4个顶点坐标box, 通过函数 cv2.cv.BoxPoints() 获得,box:[ [x0,y0], [x1,y1], [x2,y2], [x3,y3] ]
最小外接矩形的4个顶点顺序、中心坐标、宽度、高度、旋转角度(是度数形式,不是弧度数)的对应关系如下:
注意:旋转角度θ是水平轴(x轴)逆时针旋转,与碰到的矩形的第一条边的夹角。并且这个边的边长是width,另一条边边长是height。也就是说,在这里,width与height不是按照长短来定义的。
在opencv中,坐标系原点在左上角,相对于x轴,逆时针旋转角度为负,顺时针旋转角度为正。在这里,θ∈(-90度,0]。
=================================================
cv2.minAreaRect(cnt)
和
cv2.boundingRect(cnt)
的区别
用绿色(0, 255, 0)来画出最小的矩形框架
x, y, w, h = cv2.boundingRect(cnt)
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
用红色表示有旋转角度的矩形框架
rect = cv2.minAreaRect(cnt)
box = cv2.cv.BoxPoints(rect)
box = np.int0(box)
cv2.drawContours(img, [box], 0, (0, 0, 255), 2)
cv2.imwrite(‘contours.png’, img)
矩形边框(Bounding Rectangle)是说,用一个最小的矩形,把找到的形状包起来。还有一个带旋转的矩形,面积会更小,效果见下图
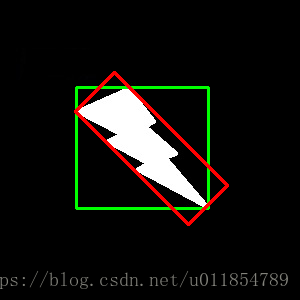
Bounding Rectangle
上代码
首先介绍下cv2.boundingRect(img)这个函数
这个函数很简单,img是一个二值图,也就是它的参数;
返回四个值,分别是x,y,w,h;
x,y是矩阵左上点的坐标,w,h是矩阵的宽和高
然后利用cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)画出矩行
参数解释
第一个参数:img是原图
第二个参数:(x,y)是矩阵的左上点坐标
第三个参数:(x+w,y+h)是矩阵的右下点坐标
第四个参数:(0,255,0)是画线对应的rgb颜色
第五个参数:2是所画的线的宽度
==================================================