本文转载于:https://blog.csdn.net/datase/article/details/72331031
注:转载处的文章也是转载的,但是该作者没有给出原创地址,所以我只能先给出该作者的地址,侵删。
代码部分转载出问题,请大家转到连接处查看。
最稳定极值区域介绍
如把灰度图看成高低起伏的地形图,其中灰度值看成海平面高度的话,MSER的作用就是在灰度图中找到符合条件的坑洼。条件为坑的最小高度,坑的大小,坑的倾斜程度,坑中如果已有小坑时大坑与小坑的变化率。
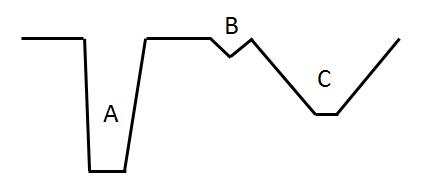
上图展示了几种不同的坑洼,根据最小高度,大小,倾斜程度这些条件的不同,选择的坑也就不同。
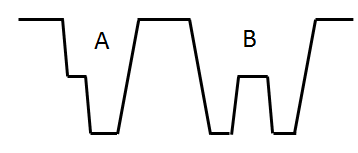
上图展示了最后一个条件,大坑套小坑的情况。根据条件的不同,选择也不同。
以上便是对坑的举例,MSER主要流程就三部分组成:
1.预处理数据
2.遍历灰度图
3.判断一个区域(坑洼)是否满足条件
简单来说,就如将水注入这个地形中。水遇到低处就往低处流,如果没有低处了,水位就会一点点增长,直至淹没整个地形。在之前预处理下数据,在水位提高时判断下是否满足条件。
预处理数据
先说下流程中的主要部件,如下:
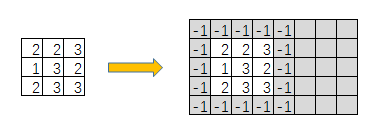
1.img,由原8位单通道灰度图转化的更容易遍历和记录数据的32位单通道图。预处理内容为:
32位值记录从这点是否探索过,探索过的方向,灰度值;图大小也扩大了,最外添加了一个像素的完整一圈,值为-1可看作墙,宽度也改变为2的整数次方,用于加快运算。
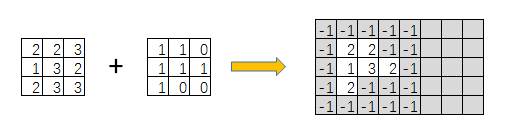
如果由掩码图,如下:
2.heap,记录坑洼边界的堆栈,每个灰度值都有自己的堆栈。预处理内容为:
计算所有灰度值的个数,这样提前就可以分配堆栈大小。例如知道了灰度2的像素由4个,就可以将灰度2的堆栈大小分配为5(多一个位标志位空)。
3.comp,记录水坑数据的堆栈,有水位值(灰度值),面积(像素个数和像素位置)等。预处理内容为:
仅仅是分配内存,分配257个(0-255外多一个用作结束)
4.history,记录水位抬高的历史,就是一个小坑抬高水位后一点点变成大坑的历史。预处理内容为:
仅仅是分配内存,大小为像素点个数(就是宽*高)。可以想成所有点都不同都可以形成历史的最大个数。
遍历灰度图
在重复下整个简单的过程:就如将水注入这个地形中。水遇到低处就往低处流,如果没有低处了,水位就会一点点增长,直至淹没整个地形。先说下主要部件:
1.img,由原8位单通道灰度图转化的更容易遍历和记录数据的32位单通道图。遍历时:
当前像素位置中有3位记录方向(除了东南西北还有一个用来代表结束),逐个改变方向遍历。还有最高1位记录是否发现过了。根据方向遍历相邻像素,如果4个方向都探索过了,就从heap边界中找到一个最小灰度的边界,出栈来用作当前像素。最终将所有像素的4个方向都走完,也是所有像素都被发现了,遍历就结束。
2.heap,记录坑洼边界的堆栈,每个灰度值都有自己的堆栈。遍历时:
当水遇到低处时入栈当前位置为低处的边界,当水遇到相等高度或高处时入栈那个边界;当抬高水位时出栈被抬高到的边界。
3.comp,记录水坑数据的堆栈,有水位值(灰度值),面积(像素个数和像素位置)等。遍历时:
当水位下降时新入栈,水位提高时出栈并可能与之前的合并。
4.history,记录水位抬高的历史,就是一个小坑抬高水位后一点点变成大坑的历史。遍历时:
history主要是记录用来判断最大稳定极值区域的数据,没有遍历的作用。主要记录时刻有两种:提高水位到边界heap中的最小高度,提高水位到comp中上一项的高度。要记录灰度值,像素数,快捷指针,孩子指针,稳定时的像素数。
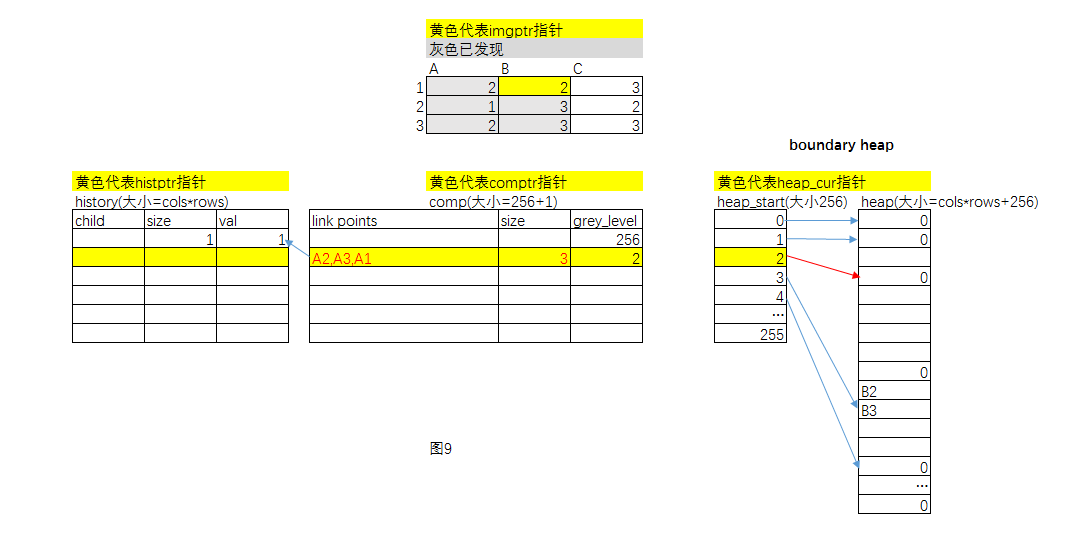
下面举例子,走下遍历的流程(并不是依次就是一步,一些步骤合并了)(红色为有变动位置,时间匆忙没有仔细校准每个位置):
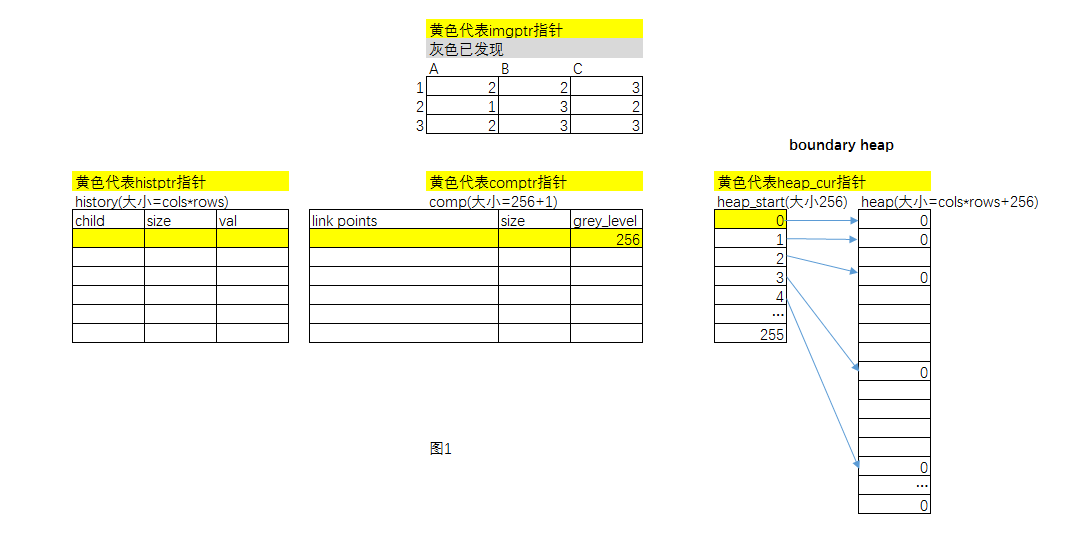
中上,要遍历的灰度图。为了方便观看,上文提到周围一圈的-1被去掉了。
左下,history是抬高水位的历史。
中下,comp是水位数据。预先入栈一个256的灰度作为顶,用来抬高水位时判断边界值小还是上一个水位数据的灰度值小。
右下,heap是边界堆栈,heap_start是每个灰度指向heap堆栈的指针。特殊说明下,heap是一个个堆栈连接在一起的一个数组,由于上面说的预处理过了,已经知道每个灰度的像素个数,所以提前指定了heap_start中每个灰度指向heap中的位置,指向0代表所在堆栈没有数据。例如灰度2有4个像素,所以灰度3的指针从灰度2指针后5个后开始,4个是像素数,1个是代表空的0。
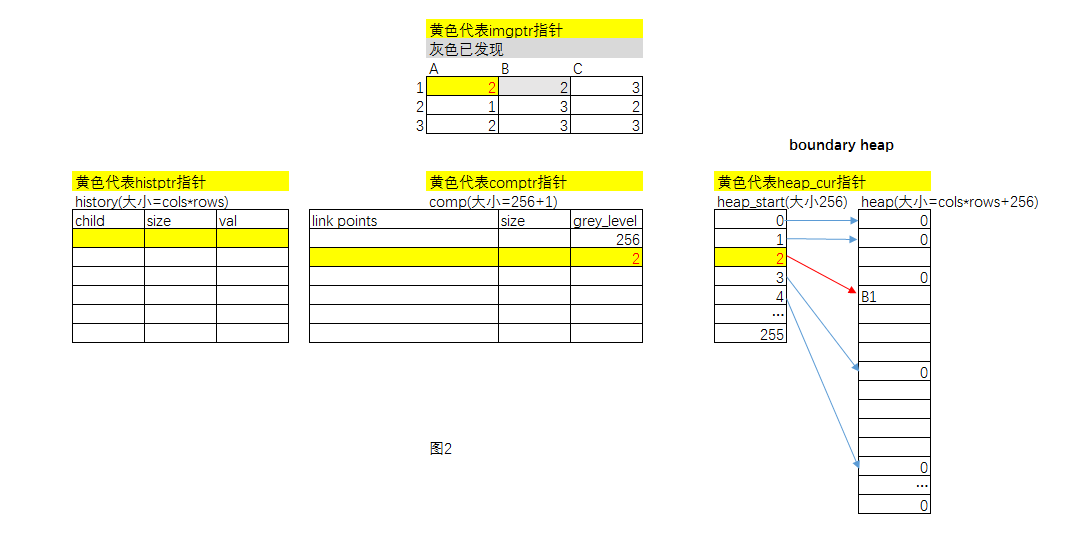
从A1位置开始,comp中入栈个灰度2的数据项,并将heap_cur当前指针设置为2灰度的指针。
探索A1右边B1,标识为已发现。B1的值2没有小于当前水位值2,作为边界入栈。
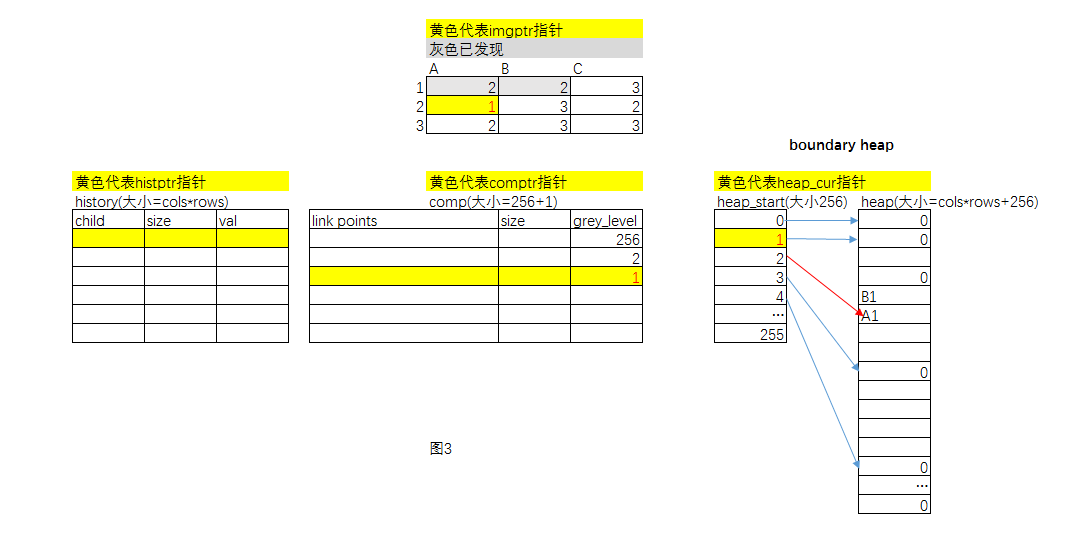
探索A1下面的A2。值1小于当前水位2,将2入栈边界栈,入栈水位数据1,调整边界指针heap_cur为指向1的指针,当前像素为A2。
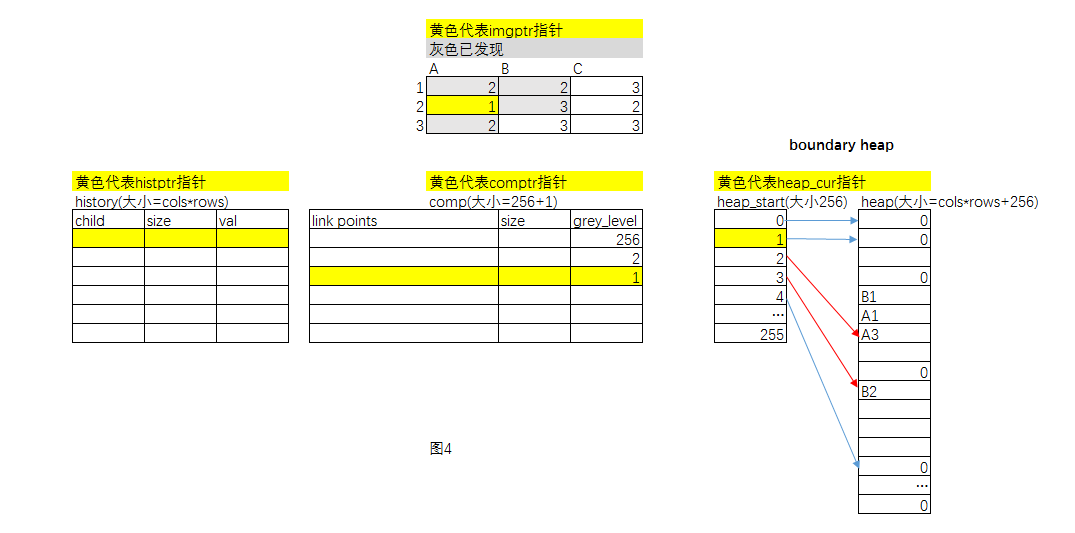
探索A2右边B3与下边A3,都没有比当前水位1小,分别入栈所属灰度的边界栈。
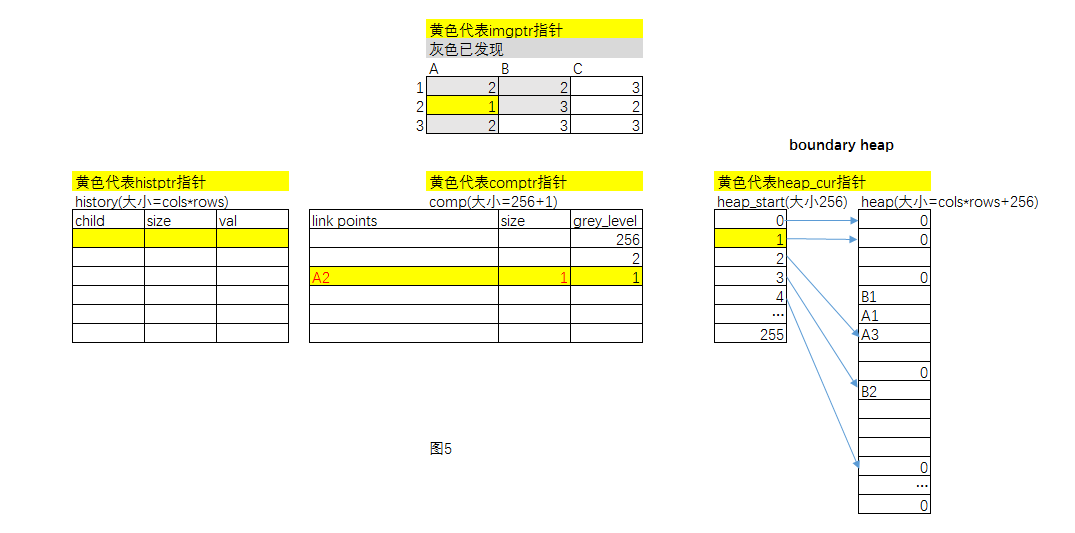
A2所有方向都探索完,将A2加入当前水位数据comp中。
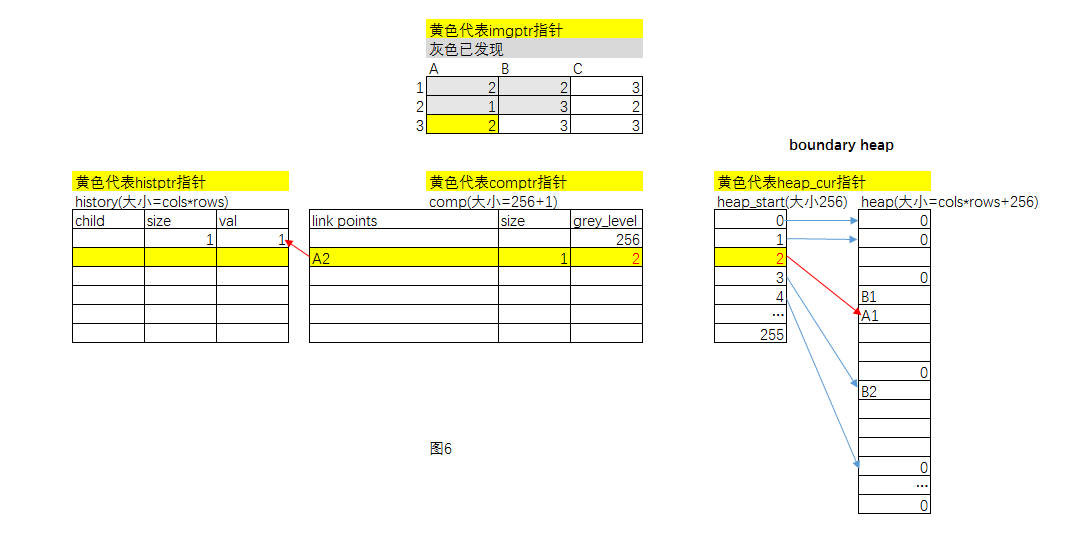
在边界栈中找到最小灰度的一个值出栈(图5里边界里有灰度2的和灰度3的,从当前灰度1开始一点点加大所以找到了灰度2),出栈了A3。A3的灰度2,所以抬高水位。记录历史histroy,修改当前水位数据灰度为2,边界指针heap_cur指向2灰度的堆栈。
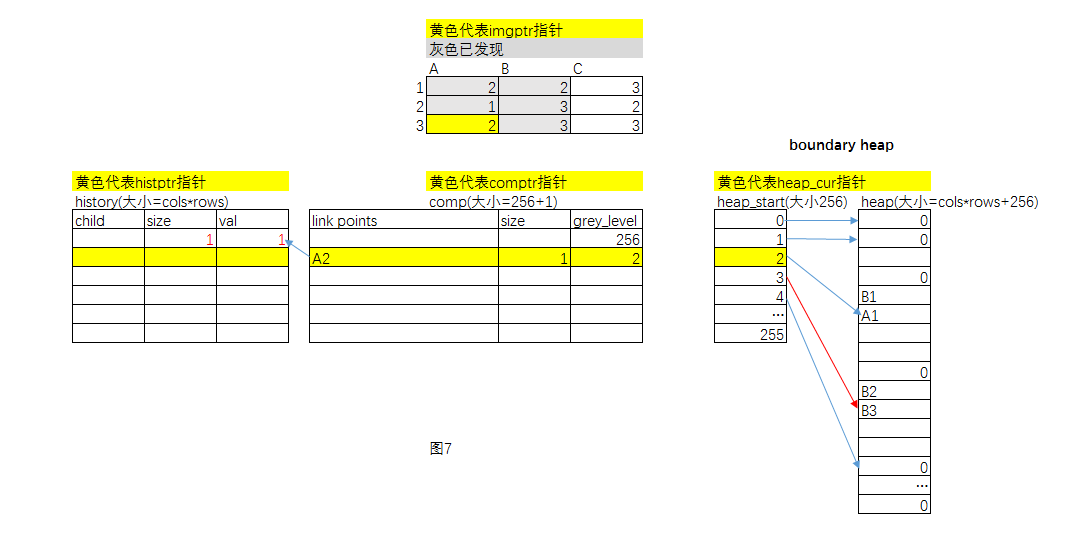
探索A3周边,发现B3,灰度3比当前大作为边界入栈。
A3所有方向也都探索完,将A3加入当前水位数据comp中。
边界中找到A1。由于A1灰度还是2,没有提升水位。将A1作为当前像素。
刚刚的A1周围也早就探索完了,将A1加入当前水位数据comp中。
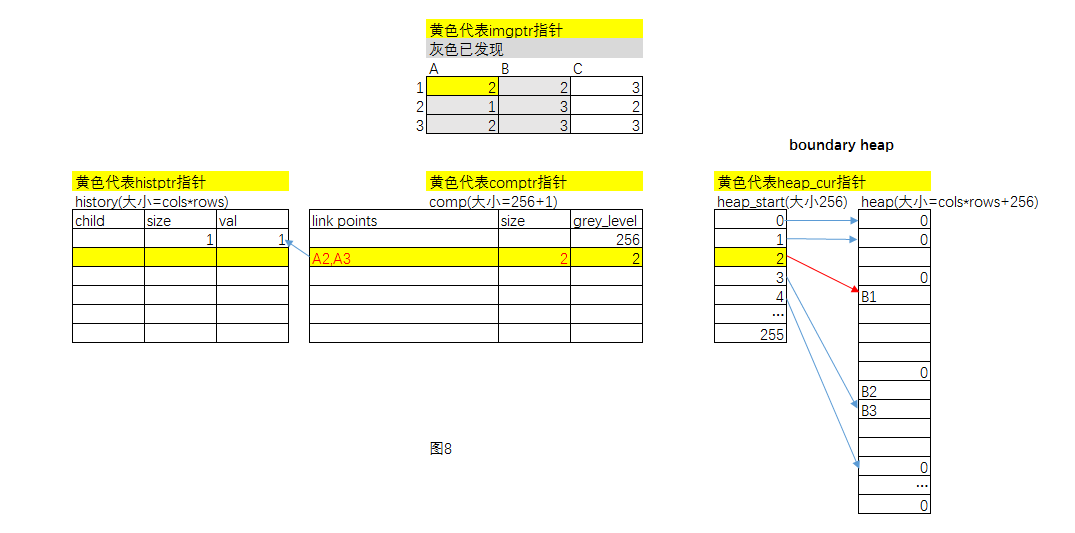
又在边界中找到了B1,并出栈作为当前像素。
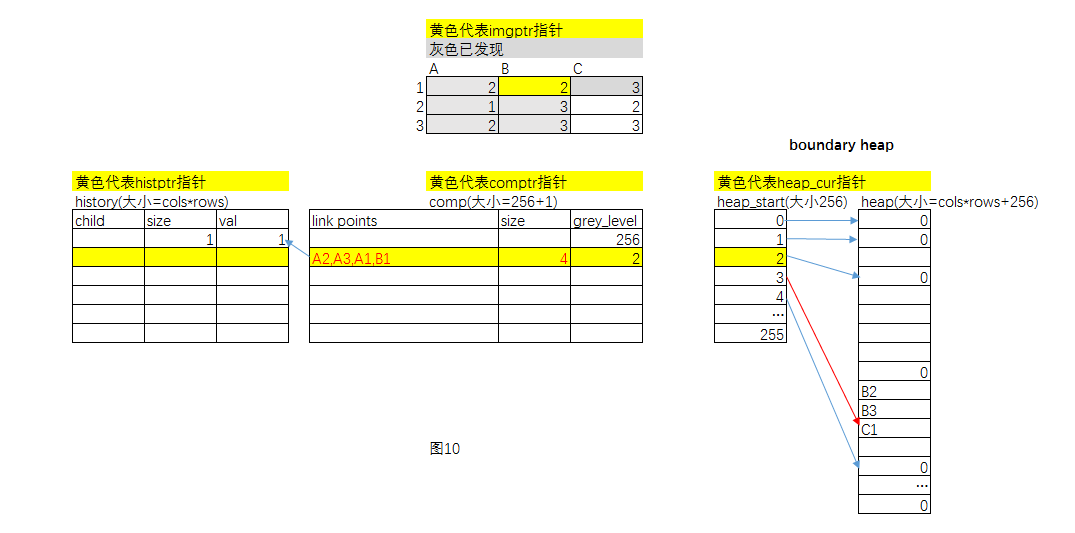
B1右边探索到了C1,加入灰度3的边界栈。
这时,B1周围已经探索完毕,将B1加入当前水位数据comp中。
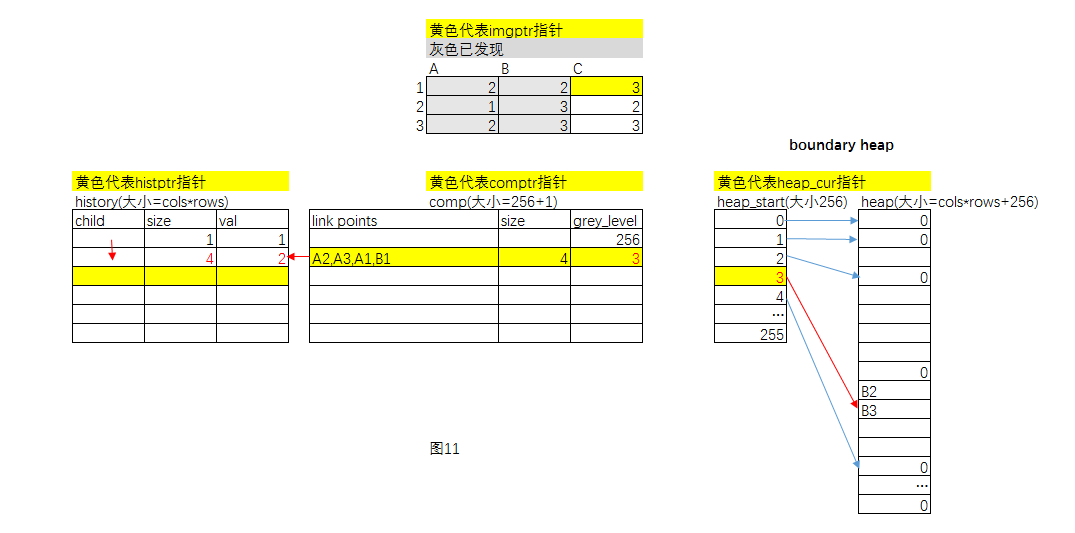
B1被加入在边界栈中从灰度2开始查找,找到灰度3中C1作为当前像素。然后记录历史history,提高当前水位数据comp的灰度值,设置heap_cur指针到灰度3的边界栈。
从当前像素C1向下找到C2,C2灰度比当前低。将当前像素C1入栈边界栈,新建灰度2的水位数据comp,边界指针heap_cur指向灰度2,设置C2为当前指针。
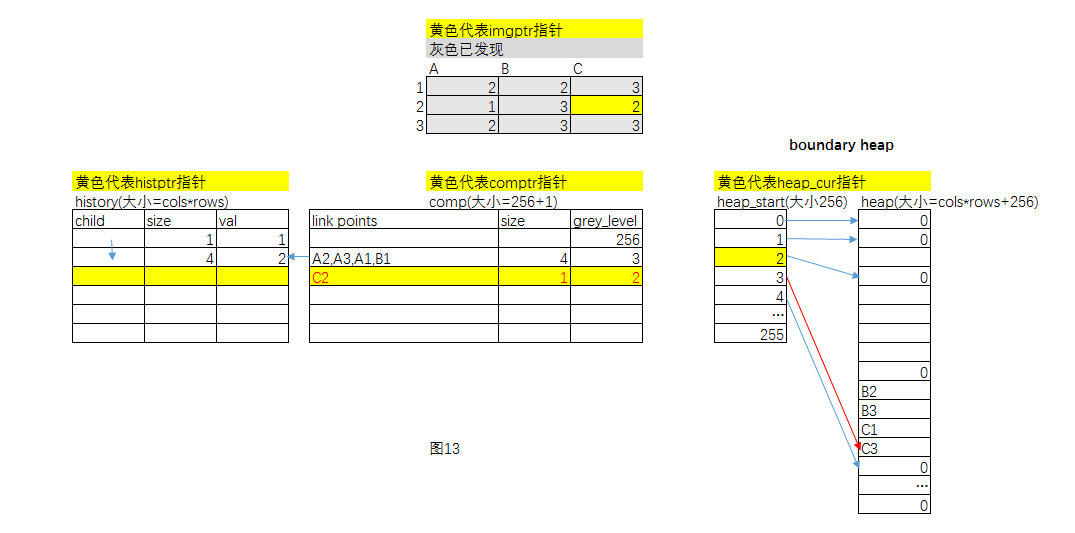
探索C2下面最后一个像素C3,将C3加入边界栈。
将C2加入水位数据comp中。
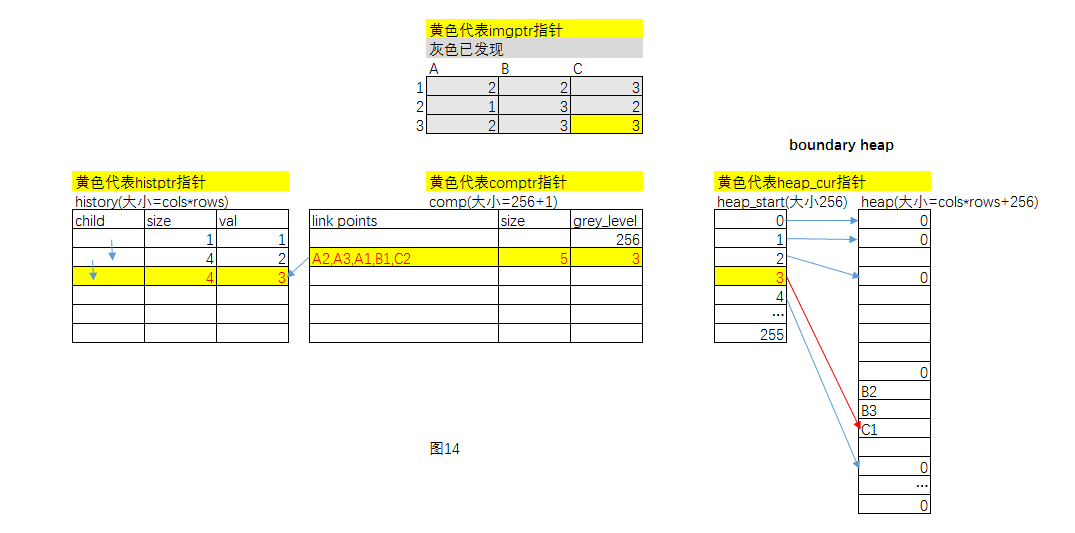
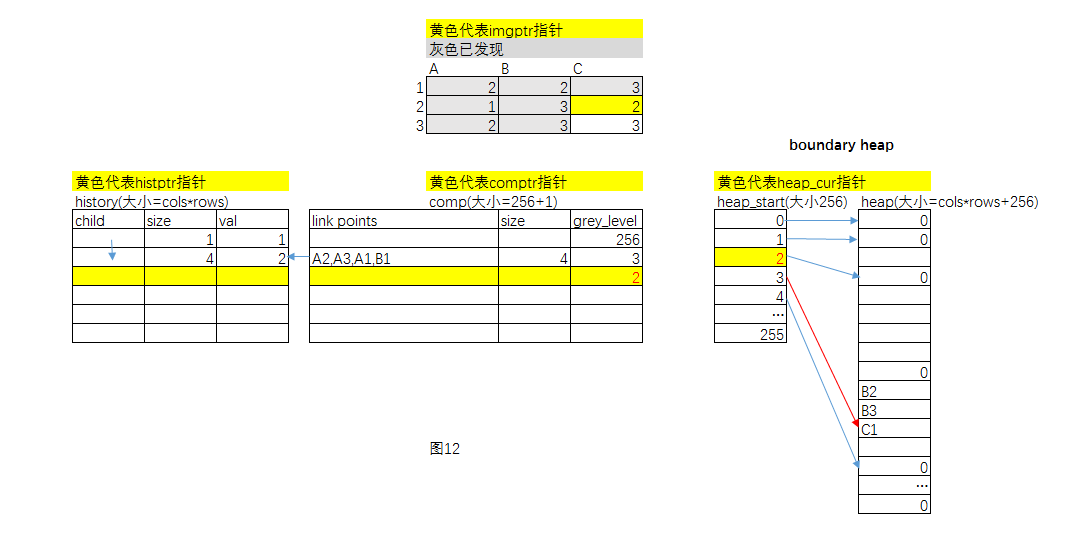
需要抬高水位了,从灰度3的边界栈中出栈C3,发现灰度和上一个水位数据comp的灰度一样,需要合并这两个comp数据。添加历史history,合并两个comp数,改变边界栈heap_cur到灰度3,设置C3为当前像素。
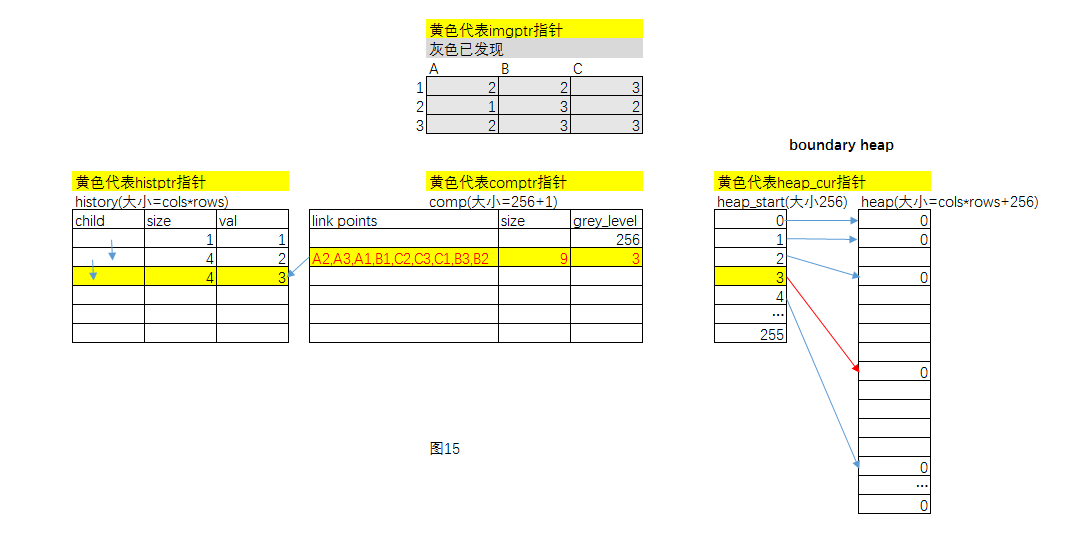
最后的C3,C1,B3,B2周围都没有可以探索的像素了,依次出栈加入水位数据。
至此所有9个像素都探索完毕了。
判断一个区域(坑洼)是否满足条件
先看下参数:
int delta; // 两个区域间的灰度差
int minArea; // 区域最小像素数
int maxArea; // 区域最大像素数
double maxVariation; // 两个区域的偏差
double minDiversity; // 当前区域与稳定区域的变化率
一个水坑的变化如下图A,随着水位的提高,面积由Ra变为Rb在到Rc,Ra为Rb的父区域;判断极值区域的方法如图B,在delta水位差间两个区域面积是否满足一定条件;还有一个判断条件如图C,如果已经有一个候选区域Rstable了,Rcandidate是否可以作为一个极值区域,也就是大坑套小坑的情况。
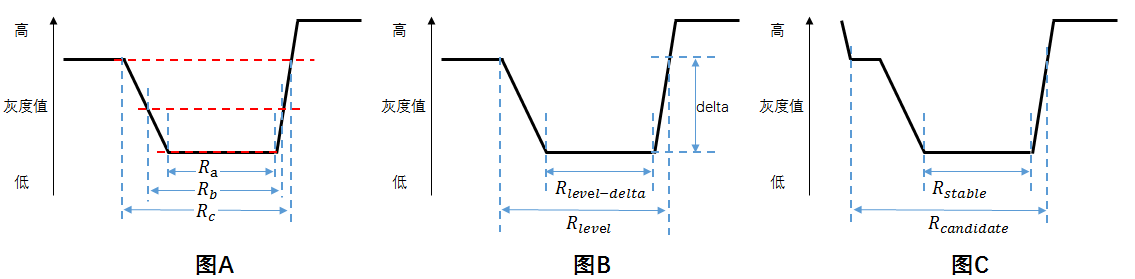
maxVariation是上图B的情况,值为下面的公式A;minDiversity是上图C的情况,值为下面公式B:

下面是在条件判断时两个有用的部件(其他没有任何作用):
3.comp,记录水坑数据的堆栈,有水位值(灰度值),面积(像素个数和像素位置)等。条件判断时:
有个history指向当前区域的历史的指针,用来查找当前区域之前的变化历史;var用来记录上次计算的variation;div用来记录上次计算的diversity。(var与div用来确保坑越来越稳定,如果与上次的值比较发散了则不满足条件)
4.history,记录水位抬高的历史,就是一个小坑抬高水位后一点点变成大坑的历史。条件判断时:
每一个历史项都有指向孩子历史的指针child,与指向相差delta灰度历史的快捷指针shortcut,还有上次稳定时的像素数stable,最后就是那个历史时刻的灰度值val与像素数size。(快捷指针是用来加速计算的,在历史里一个一个向前找也能找到,但总没有直接在上次找到的位置前后找更快吧:))
源码
基本结构:

typedef struct LinkedPoint { struct LinkedPoint* prev; struct LinkedPoint* next; Point pt; } LinkedPoint;</span><span style="color:#008000;">//</span><span style="color:#008000;"> the history of region grown</span> typedef <span style="color:#0000ff;">struct</span><span style="color:#000000;"> MSERGrowHistory { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 快捷路径,是指向以前历史的指针。因为不是一个一个连接的,所以不是parent。算法中是记录灰度差为delta的历史的指针。 </span><span style="color:#008000;">//</span><span style="color:#008000;"> 例如:当前是灰度是10,delta=3,这个指针就指向灰度为7时候的历史</span> <span style="color:#0000ff;">struct</span> MSERGrowHistory*<span style="color:#000000;"> shortcut; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 指向更新历史的指针,就是从这个历史繁衍的新历史,所以叫孩子</span> <span style="color:#0000ff;">struct</span> MSERGrowHistory*<span style="color:#000000;"> child; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 大于零代表稳定,值是稳定是的像素数。这个值在不停的继承</span> <span style="color:#0000ff;">int</span> stable; <span style="color:#008000;">//</span><span style="color:#008000;"> when it ever stabled before, record the size </span><span style="color:#008000;">//</span><span style="color:#008000;"> 灰度值</span> <span style="color:#0000ff;">int</span><span style="color:#000000;"> val; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 像素数</span> <span style="color:#0000ff;">int</span><span style="color:#000000;"> size; } MSERGrowHistory; typedef </span><span style="color:#0000ff;">struct</span><span style="color:#000000;"> MSERConnectedComp { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 像素点链的头</span> LinkedPoint*<span style="color:#000000;"> head; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 像素点链的尾</span> LinkedPoint*<span style="color:#000000;"> tail; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 区域上次的增长历史,可以通过找个历史找到之前的记录</span> MSERGrowHistory*<span style="color:#000000;"> history; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 灰度值</span> unsigned <span style="color:#0000ff;">long</span><span style="color:#000000;"> grey_level; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 像素数</span> <span style="color:#0000ff;">int</span><span style="color:#000000;"> size; </span><span style="color:#0000ff;">int</span> dvar; <span style="color:#008000;">//</span><span style="color:#008000;"> the derivative of last var</span> <span style="color:#0000ff;">float</span> <span style="color:#0000ff;">var</span>; <span style="color:#008000;">//</span><span style="color:#008000;"> the current variation (most time is the variation of one-step back)</span>
}
MSERConnectedComp;
struct MSERParams
{
MSERParams(int _delta, int _minArea, int _maxArea, double _maxVariation,
double _minDiversity, int _maxEvolution, double _areaThreshold,
double _minMargin, int _edgeBlurSize)
: delta(_delta), minArea(_minArea), maxArea(_maxArea), maxVariation(_maxVariation),
minDiversity(_minDiversity), maxEvolution(_maxEvolution), areaThreshold(_areaThreshold),
minMargin(_minMargin), edgeBlurSize(_edgeBlurSize)
{}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> MSER使用</span>
<span style="color:#0000ff;">int</span> delta; <span style="color:#008000;">//</span><span style="color:#008000;"> 两个区域间的灰度差</span>
<span style="color:#0000ff;">int</span> minArea; <span style="color:#008000;">//</span><span style="color:#008000;"> 区域最小像素数</span>
<span style="color:#0000ff;">int</span> maxArea; <span style="color:#008000;">//</span><span style="color:#008000;"> 区域最大像素数</span>
<span style="color:#0000ff;">double</span> maxVariation; <span style="color:#008000;">//</span><span style="color:#008000;"> 两个区域的偏差</span>
<span style="color:#0000ff;">double</span> minDiversity; <span style="color:#008000;">//</span><span style="color:#008000;"> 当前区域与稳定区域的变化率
</span><span style="color:#008000;">//</span><span style="color:#008000;"> MSCR使用</span>
<span style="color:#0000ff;">int</span><span style="color:#000000;"> maxEvolution;
</span><span style="color:#0000ff;">double</span><span style="color:#000000;"> areaThreshold;
</span><span style="color:#0000ff;">double</span><span style="color:#000000;"> minMargin;
</span><span style="color:#0000ff;">int</span><span style="color:#000000;"> edgeBlurSize;
};</span></pre>
预处理:
// to preprocess src image to following format // 32-bit image // > 0 is available, < 0 is visited // 17~19 bits is the direction // 8~11 bits is the bucket it falls to (for BitScanForward) // 0~8 bits is the color /** @brief 将所给原单通道灰度图和掩码图 预处理为一张方便遍历与记录数据的32位单通道图像;并且根据像素灰度值分配边缘栈。 * 32位格式如下: * > 0 可用,< 0 已经被访问 * 17~19位用于记录下一个要探索的方向,5个值 * 8~11位 用于优化的二值搜索 * 0~8位用于记录灰度值 *@param heap_cur 边缘栈 *@param src 原单通道灰度图 *@param mask 掩码图 */ static int* preprocessMSER_8UC1(CvMat* img, int*** heap_cur, CvMat* src, CvMat* mask) { // 数据有效内容是在img中,由一圈-1包围着,靠左的区域。也就是被一圈-1的墙包围着。</span><span style="color:#008000;">//</span><span style="color:#008000;"> 原始数据跳转到下一行的偏移量。</span> <span style="color:#0000ff;">int</span> srccpt = src->step - src-><span style="color:#000000;">cols; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 跳转到下一行的偏移量,最后减一是因为,例如:xoooxxx,o是有效数据,x是扩充出来的。偏移量应该是3,就是ooo最 </span><span style="color:#008000;">//</span><span style="color:#008000;"> 右边的xxx个数。为了计算,就需要减去ooo最左面的一个x。</span> <span style="color:#0000ff;">int</span> cpt_1 = img->cols - src->cols - <span style="color:#800080;">1</span><span style="color:#000000;">; </span><span style="color:#0000ff;">int</span>* imgptr = img-><span style="color:#000000;">data.i; </span><span style="color:#0000ff;">int</span>*<span style="color:#000000;"> startptr; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 用于记录每个灰度有多少像素</span> <span style="color:#0000ff;">int</span> level_size[<span style="color:#800080;">256</span><span style="color:#000000;">]; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < <span style="color:#800080;">256</span>; i++<span style="color:#000000;">) level_size[i] </span>= <span style="color:#800080;">0</span><span style="color:#000000;">; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 设置第一行为-1</span> <span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < src->cols + <span style="color:#800080;">2</span>; i++<span style="color:#000000;">) { </span>*imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; imgptr</span>++<span style="color:#000000;">; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 偏移到第一个有效数据所在行的开头</span> imgptr += cpt_1 - <span style="color:#800080;">1</span><span style="color:#000000;">; uchar</span>* srcptr = src-><span style="color:#000000;">data.ptr; </span><span style="color:#0000ff;">if</span><span style="color:#000000;"> (mask) { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 有掩码</span> startptr = <span style="color:#800080;">0</span>; <span style="color:#008000;">//</span><span style="color:#008000;"> 数据处理的开始位置,为最左上的位置。</span> uchar* maskptr = mask-><span style="color:#000000;">data.ptr; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < src->rows; i++<span style="color:#000000;">) { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 最左面设置为-1</span> *imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; imgptr</span>++<span style="color:#000000;">; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> j = <span style="color:#800080;">0</span>; j < src->cols; j++<span style="color:#000000;">) { </span><span style="color:#0000ff;">if</span> (*<span style="color:#000000;">maskptr) { </span><span style="color:#0000ff;">if</span> (!<span style="color:#000000;">startptr) startptr </span>=<span style="color:#000000;"> imgptr; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 灰度值取反!!!!! !!!!! !!!!! !!!!!</span> *srcptr = <span style="color:#800080;">0xff</span> - *<span style="color:#000000;">srcptr; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 所在灰度值个数自增</span> level_size[*srcptr]++<span style="color:#000000;">; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 写入0~8位,8~13位用作BitScanForward</span> *imgptr = ((*srcptr >> <span style="color:#800080;">5</span>) << <span style="color:#800080;">8</span>) | (*<span style="color:#000000;">srcptr); } </span><span style="color:#0000ff;">else</span><span style="color:#000000;"> { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 标为-1,就是当作一个已经被发现的位置,和外围-1墙的原理一样</span> *imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; } imgptr</span>++<span style="color:#000000;">; srcptr</span>++<span style="color:#000000;">; maskptr</span>++<span style="color:#000000;">; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 最右面设置为-1</span> *imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 都跳到下一行开始</span> imgptr +=<span style="color:#000000;"> cpt_1; srcptr </span>+=<span style="color:#000000;"> srccpt; maskptr </span>+=<span style="color:#000000;"> srccpt; } } </span><span style="color:#0000ff;">else</span><span style="color:#000000;"> { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 就是没有掩码的情况</span> startptr = imgptr + img->cols + <span style="color:#800080;">1</span><span style="color:#000000;">; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < src->rows; i++<span style="color:#000000;">) { </span>*imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; imgptr</span>++<span style="color:#000000;">; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> j = <span style="color:#800080;">0</span>; j < src->cols; j++<span style="color:#000000;">) { </span>*srcptr = <span style="color:#800080;">0xff</span> - *<span style="color:#000000;">srcptr; level_size[</span>*srcptr]++<span style="color:#000000;">; </span>*imgptr = ((*srcptr >> <span style="color:#800080;">5</span>) << <span style="color:#800080;">8</span>) | (*<span style="color:#000000;">srcptr); imgptr</span>++<span style="color:#000000;">; srcptr</span>++<span style="color:#000000;">; } </span>*imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; imgptr </span>+=<span style="color:#000000;"> cpt_1; srcptr </span>+=<span style="color:#000000;"> srccpt; } } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 设置最后一行为-1</span> <span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < src->cols + <span style="color:#800080;">2</span>; i++<span style="color:#000000;">) { </span>*imgptr = -<span style="color:#800080;">1</span><span style="color:#000000;">; imgptr</span>++<span style="color:#000000;">; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 确定每个灰度在边界堆中的指针位置。0代表没有值。</span> heap_cur[<span style="color:#800080;">0</span>][<span style="color:#800080;">0</span>] = <span style="color:#800080;">0</span><span style="color:#000000;">; </span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">1</span>; i < <span style="color:#800080;">256</span>; i++<span style="color:#000000;">) { heap_cur[i] </span>= heap_cur[i - <span style="color:#800080;">1</span>] + level_size[i - <span style="color:#800080;">1</span>] + <span style="color:#800080;">1</span><span style="color:#000000;">; heap_cur[i][</span><span style="color:#800080;">0</span>] = <span style="color:#800080;">0</span><span style="color:#000000;">; } </span><span style="color:#0000ff;">return</span><span style="color:#000000;"> startptr; }</span></pre>
主流程及遍历方法:
static void extractMSER_8UC1_Pass(int* ioptr, int* imgptr, int*** heap_cur, // 边界栈的堆,里面是每一个灰度的栈 LinkedPoint* ptsptr, MSERGrowHistory* histptr, MSERConnectedComp* comptr, int step, int stepmask, int stepgap, MSERParams params, int color, CvSeq* contours, CvMemStorage* storage) { // ER栈第一项为结束的标识项,值为大于255的256 comptr->grey_level = 256;</span><span style="color:#008000;">//</span><span style="color:#008000;"> 将当前位置值入栈,并初始化</span> comptr++<span style="color:#000000;">; comptr</span>->grey_level = (*imgptr) & <span style="color:#800080;">0xff</span><span style="color:#000000;">; initMSERComp(comptr); </span><span style="color:#008000;">//</span><span style="color:#008000;"> 设置为已经发现</span> *imgptr |= <span style="color:#800080;">0x80000000</span><span style="color:#000000;">; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 加上灰度偏移就将指针定位到了相应灰度的边界栈上</span> heap_cur += (*imgptr) & <span style="color:#800080;">0xff</span><span style="color:#000000;">; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 四个方向的偏移量,上下的偏移是隔行的步长</span> <span style="color:#0000ff;">int</span> dir[] = { <span style="color:#800080;">1</span>, step, -<span style="color:#800080;">1</span>, -<span style="color:#000000;">step };
#ifdef INTRIN_ENABLED
unsigned long heapbit[] = { 0, 0, 0, 0, 0, 0, 0, 0 };
unsigned long* bit_cur = heapbit + (((*imgptr) & 0x700) >> 8);
#endif
<span style="color:#008000;">//</span><span style="color:#008000;"> 循环</span>
<span style="color:#0000ff;">for</span><span style="color:#000000;"> (;;)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> take tour of all the 4 directions
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 提取当前像素的方向值,判断是否还有方向没有走过</span>
<span style="color:#0000ff;">while</span> (((*imgptr) & <span style="color:#800080;">0x70000</span>) < <span style="color:#800080;">0x40000</span><span style="color:#000000;">)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> get the neighbor
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 通过方向对应的偏移获得相邻像素指针</span>
<span style="color:#0000ff;">int</span>* imgptr_nbr = imgptr + dir[((*imgptr) & <span style="color:#800080;">0x70000</span>) >> <span style="color:#800080;">16</span><span style="color:#000000;">];
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 判断是否访问过</span>
<span style="color:#0000ff;">if</span> (*imgptr_nbr >= <span style="color:#800080;">0</span>) <span style="color:#008000;">//</span><span style="color:#008000;"> if the neighbor is not visited yet</span>
{
// 没有访问过,标记为访问过
*imgptr_nbr |= 0x80000000; // mark it as visited
if (((*imgptr_nbr) & 0xff) < ((*imgptr) & 0xff))
{
// when the value of neighbor smaller than current
// push current to boundary heap and make the neighbor to be the current one
// create an empty comp
// 如果相邻像素的灰度小于当前像素,将当前像素加入边界栈堆,并把相邻像素设置为当前像素,并新建ER栈项
// 将当前加入边界栈堆
(*heap_cur)++;
**heap_cur = imgptr;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 转换方向</span>
*imgptr += <span style="color:#800080;">0x10000</span><span style="color:#000000;">;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 将边界栈堆的指针调整为相邻的像素灰度所对应的位置</span>
heap_cur += ((*imgptr_nbr) & <span style="color:#800080;">0xff</span>) - ((*imgptr) & <span style="color:#800080;">0xff</span><span style="color:#000000;">);
#ifdef INTRIN_ENABLED
_bitset(bit_cur, (*imgptr) & 0x1f);
bit_cur += (((*imgptr_nbr) & 0x700) - ((*imgptr) & 0x700)) >> 8;
#endif
// 将相邻像素设置为当前像素
imgptr = imgptr_nbr;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 新建ER栈项,并设置灰度为当前像素灰度</span>
comptr++<span style="color:#000000;">;
initMSERComp(comptr);
comptr</span>->grey_level = (*imgptr) & <span style="color:#800080;">0xff</span><span style="color:#000000;">;
</span><span style="color:#0000ff;">continue</span><span style="color:#000000;">;
}
</span><span style="color:#0000ff;">else</span><span style="color:#000000;"> {
</span><span style="color:#008000;">//</span><span style="color:#008000;"> otherwise, push the neighbor to boundary heap
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 否则,将相邻像素添加到对应的边界帧堆中</span>
heap_cur[((*imgptr_nbr) & <span style="color:#800080;">0xff</span>) - ((*imgptr) & <span style="color:#800080;">0xff</span>)]++<span style="color:#000000;">;
</span>*heap_cur[((*imgptr_nbr) & <span style="color:#800080;">0xff</span>) - ((*imgptr) & <span style="color:#800080;">0xff</span>)] =<span style="color:#000000;"> imgptr_nbr;
#ifdef INTRIN_ENABLED
_bitset(bit_cur + ((((*imgptr_nbr) & 0x700) - ((*imgptr) & 0x700)) >> 8), (*imgptr_nbr) & 0x1f);
#endif
}
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 将当前像素的方向转换到下一个方向</span>
*imgptr += <span style="color:#800080;">0x10000</span><span style="color:#000000;">;
}
</span><span style="color:#0000ff;">int</span> imsk = (<span style="color:#0000ff;">int</span>)(imgptr -<span style="color:#000000;"> ioptr);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 记录x&y,</span>
ptsptr->pt = cvPoint(imsk&stepmask, imsk >><span style="color:#000000;"> stepgap);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> get the current location</span>
accumulateMSERComp(comptr, ptsptr);
ptsptr++;
// get the next pixel from boundary heap
// 从边界栈堆中获取一个像素用作当前像素
if (**heap_cur)
{
// 当前灰度的边界栈堆有值可以用,将当前边界栈堆值设置为当前像素,因为当前边界栈堆的灰度就是当前像素的灰度,所以可以直接拿出来用
imgptr = **heap_cur;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 出栈</span>
(*heap_cur)--<span style="color:#000000;">;
#ifdef INTRIN_ENABLED
if (!heap_cur)
_bitreset(bit_cur, (*imgptr) & 0x1f);
#endif
}
else {
// 当前灰度边界栈堆中没有值可以用
#ifdef INTRIN_ENABLED
bool found_pixel = 0;
unsigned long pixel_val;
for (int i = ((*imgptr) & 0x700) >> 8; i < 8; i++)
{
if (_BitScanForward(&pixel_val, *bit_cur))
{
found_pixel = 1;
pixel_val += i << 5;
heap_cur += pixel_val - ((*imgptr) & 0xff);
break;
}
bit_cur++;
}
if (found_pixel)
#else
// 从当前灰度后逐步提高灰度值,在边界堆中找到一个边界像素
heap_cur++;
unsigned long pixel_val = 0;
for (unsigned long i = ((*imgptr) & 0xff) + 1; i < 256; i++)
{
if (heap_cur)
{
// 不为零,指针指向了一个像素,这个灰度值还有边界
pixel_val = i;
break;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 提高灰度值</span>
heap_cur++<span style="color:#000000;">;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 判断边界中是否还有像素</span>
<span style="color:#0000ff;">if</span><span style="color:#000000;"> (pixel_val)
#endif
{
// 将边界中的像素作为当前像素,并从边界中去除
imgptr = heap_cur;
(*heap_cur)–;
#ifdef INTRIN_ENABLED
if (!heap_cur)
_bitreset(bit_cur, pixel_val & 0x1f);
#endif
if (pixel_val < comptr[-1].grey_level)
{
// 刚从边界获得灰度如果小于上一个MSER组件灰度值,需要提高当前水位到边界的灰度值
// check the stablity and push a new history, increase the grey level
if (MSERStableCheck(comptr, params))
{
CvContour* contour = MSERToContour(comptr, storage);
contour->color = color;
cvSeqPush(contours, &contour);
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 由于水位要有变化了,添加一个历史</span>
MSERNewHistory(comptr, histptr);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 提高水位到边界的水位</span>
comptr[<span style="color:#800080;">0</span>].grey_level =<span style="color:#000000;"> pixel_val;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 指向下一个未使用历史空间</span>
histptr++<span style="color:#000000;">;
}
</span><span style="color:#0000ff;">else</span><span style="color:#000000;"> {
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 刚从边界获得灰度如果不小于上一个MSER组件灰度值,其实就是和上一个灰度值一样。
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 例如:当前水位2,上一个水位3,从边界出栈的水位为3.
</span><span style="color:#008000;">//</span><span style="color:#008000;"> keep merging top two comp in stack until the grey level >= pixel_val</span>
<span style="color:#0000ff;">for</span><span style="color:#000000;"> (;;)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 合并MSER组件,里面也随带完成了一个历史</span>
comptr--<span style="color:#000000;">;
MSERMergeComp(comptr </span>+ <span style="color:#800080;">1</span><span style="color:#000000;">, comptr, comptr, histptr);
histptr</span>++<span style="color:#000000;">;
</span><span style="color:#0000ff;">if</span> (pixel_val <= comptr[<span style="color:#800080;">0</span><span style="color:#000000;">].grey_level)
</span><span style="color:#0000ff;">break</span><span style="color:#000000;">;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 到这里,等于comptr[0].grey_level < pixel_val,也是当前像素的灰度与MSER组件的不一致,要提高MSER组件灰度</span>
<span style="color:#0000ff;">if</span> (pixel_val < comptr[-<span style="color:#800080;">1</span><span style="color:#000000;">].grey_level)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 其实就是comptr[0].grey_level < pixel_val < comptr[-1].grey_level
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 当前灰度大于当前MSER灰度小于上一个MSER组件灰度。同上面的代码情况一样。
</span><span style="color:#008000;">//</span><span style="color:#008000;"> check the stablity here otherwise it wouldn't be an ER</span>
<span style="color:#0000ff;">if</span> (MSERStableCheck(comptr, <span style="color:#0000ff;">params</span><span style="color:#000000;">))
{
CvContour</span>* contour =<span style="color:#000000;"> MSERToContour(comptr, storage);
contour</span>->color =<span style="color:#000000;"> color;
cvSeqPush(contours, </span>&<span style="color:#000000;">contour);
}
MSERNewHistory(comptr, histptr);
comptr[</span><span style="color:#800080;">0</span>].grey_level =<span style="color:#000000;"> pixel_val;
histptr</span>++<span style="color:#000000;">;
</span><span style="color:#0000ff;">break</span><span style="color:#000000;">;
}
}
}
}
</span><span style="color:#0000ff;">else</span>
<span style="color:#0000ff;">break</span><span style="color:#000000;">;
}
}
}
</span><span style="color:#008000;">/*</span><span style="color:#008000;">* @brief 通过8UC1类型的图像提取MSER
*@param mask 掩码
*@param contours 轮廓结果
*@param storage 轮廓内存空间
*@param params 参数
</span><span style="color:#008000;">*/</span>
<span style="color:#0000ff;">static</span> <span style="color:#0000ff;">void</span> extractMSER_8UC1(CvMat*<span style="color:#000000;"> src,
CvMat</span>*<span style="color:#000000;"> mask,
CvSeq</span>*<span style="color:#000000;"> contours,
CvMemStorage</span>*<span style="color:#000000;"> storage,
MSERParams </span><span style="color:#0000ff;">params</span><span style="color:#000000;">)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 为了加速计算,将每行数据大小扩展为大于原大小的第一个2的整指数。
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 这样在后面计算y时,只要右移stepgap就算除以2^stepgap了</span>
<span style="color:#0000ff;">int</span> step = <span style="color:#800080;">8</span><span style="color:#000000;">;
</span><span style="color:#0000ff;">int</span> stepgap = <span style="color:#800080;">3</span><span style="color:#000000;">;
</span><span style="color:#0000ff;">while</span> (step < src->step + <span style="color:#800080;">2</span><span style="color:#000000;">)
{
step </span><<= <span style="color:#800080;">1</span><span style="color:#000000;">;
stepgap</span>++<span style="color:#000000;">;
}
</span><span style="color:#0000ff;">int</span> stepmask = step - <span style="color:#800080;">1</span><span style="color:#000000;">;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> to speedup the process, make the width to be 2^N</span>
CvMat* img = cvCreateMat(src->rows + <span style="color:#800080;">2</span><span style="color:#000000;">, step, CV_32SC1);
</span><span style="color:#0000ff;">int</span>* ioptr = img->data.i + step + <span style="color:#800080;">1</span>; <span style="color:#008000;">//</span><span style="color:#008000;"> 数据在扩展后的最开始位置</span>
<span style="color:#0000ff;">int</span>* imgptr; <span style="color:#008000;">//</span><span style="color:#008000;"> 用于指向mser遍历的当前像素(所有数据)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> pre-allocate boundary heap
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 预分配边界堆和每个灰度指向堆的指针数组
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 堆大小就是像素数+所有灰度值(一个标志数据,用来表明这个灰度没有数据了)</span>
<span style="color:#0000ff;">int</span>** heap = (<span style="color:#0000ff;">int</span>**)cvAlloc((src->rows*src->cols + <span style="color:#800080;">256</span>) * <span style="color:#0000ff;">sizeof</span>(heap[<span style="color:#800080;">0</span><span style="color:#000000;">]));
</span><span style="color:#0000ff;">int</span>** heap_start[<span style="color:#800080;">256</span><span style="color:#000000;">];
heap_start[</span><span style="color:#800080;">0</span>] =<span style="color:#000000;"> heap;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> pre-allocate linked point and grow history
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 预分配连接像素点,用于将区域中的像素连接起来,大小就为所有像素个数</span>
LinkedPoint* pts = (LinkedPoint*)cvAlloc(src->rows*src->cols * <span style="color:#0000ff;">sizeof</span>(pts[<span style="color:#800080;">0</span><span style="color:#000000;">]));
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 预分配增长历史,用于记录区域在太高水位后的父子关系,最大个数为所有像素个数。</span>
MSERGrowHistory* history = (MSERGrowHistory*)cvAlloc(src->rows*src->cols * <span style="color:#0000ff;">sizeof</span>(history[<span style="color:#800080;">0</span><span style="color:#000000;">]));
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 预分配区域,用于记录每个区域的数据,大小为所有灰度值+1个超大灰度值代表顶</span>
MSERConnectedComp comp[<span style="color:#800080;">257</span><span style="color:#000000;">];
</span><span style="color:#008000;">//</span><span style="color:#008000;"> darker to brighter (MSER-)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 提取mser亮区域(preprocessMSER_8UC1中将灰度值取反)</span>
imgptr =<span style="color:#000000;"> preprocessMSER_8UC1(img, heap_start, src, mask);
extractMSER_8UC1_Pass(ioptr, imgptr, heap_start, pts, history, comp, step, stepmask, stepgap, </span><span style="color:#0000ff;">params</span>, -<span style="color:#800080;">1</span><span style="color:#000000;">, contours, storage);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> brighter to darker (MSER+)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 提取mser暗区域</span>
imgptr =<span style="color:#000000;"> preprocessMSER_8UC1(img, heap_start, src, mask);
extractMSER_8UC1_Pass(ioptr, imgptr, heap_start, pts, history, comp, step, stepmask, stepgap, </span><span style="color:#0000ff;">params</span>, <span style="color:#800080;">1</span><span style="color:#000000;">, contours, storage);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> clean up</span>
cvFree(&<span style="color:#000000;">history);
cvFree(</span>&<span style="color:#000000;">heap);
cvFree(</span>&<span style="color:#000000;">pts);
cvReleaseMat(</span>&<span style="color:#000000;">img);
}</span></pre>
条件判断和生成结果:
// clear the connected component in stack static void initMSERComp(MSERConnectedComp* comp) { comp->size = 0; comp->var = 0; comp->dvar = 1; comp->history = NULL; }</span><span style="color:#008000;">//</span><span style="color:#008000;"> add history of size to a connected component</span> <span style="color:#0000ff;">static</span> <span style="color:#0000ff;">void</span> <span style="color:#008000;">/*</span><span style="color:#008000;">* @brief 通过当前ER项构建一个对应的历史,也就是说找个ER项要准备改变了 </span><span style="color:#008000;">*/</span><span style="color:#000000;"> MSERNewHistory(MSERConnectedComp</span>* comp, MSERGrowHistory*<span style="color:#000000;"> history) { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 初始时将下一条历史设置为自己</span> history->child =<span style="color:#000000;"> history; </span><span style="color:#0000ff;">if</span> (NULL == comp-><span style="color:#000000;">history) { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 从来没有历史过,将快捷路径也设置为自己,稳定的像素数为0</span> history->shortcut =<span style="color:#000000;"> history; history</span>->stable = <span style="color:#800080;">0</span><span style="color:#000000;">; } </span><span style="color:#0000ff;">else</span><span style="color:#000000;"> { </span><span style="color:#008000;">//</span><span style="color:#008000;"> 有历史,将当前历史设置为上一个历史的下个历史</span> comp->history->child =<span style="color:#000000;"> history; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 快捷路径与稳定值继承至上一个历史</span> history->shortcut = comp->history-><span style="color:#000000;">shortcut; history</span>->stable = comp->history-><span style="color:#000000;">stable; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 记录这时的ER项的灰度值与像素数</span> history->val = comp-><span style="color:#000000;">grey_level; history</span>->size = comp-><span style="color:#000000;">size; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 设置ER项的历史为找个最新的历史</span> comp->history =<span style="color:#000000;"> history; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> merging two connected component</span> <span style="color:#0000ff;">static</span> <span style="color:#0000ff;">void</span><span style="color:#000000;"> MSERMergeComp(MSERConnectedComp</span>*<span style="color:#000000;"> comp1, MSERConnectedComp</span>*<span style="color:#000000;"> comp2, MSERConnectedComp</span>*<span style="color:#000000;"> comp, MSERGrowHistory</span>*<span style="color:#000000;"> history) { LinkedPoint</span>*<span style="color:#000000;"> head; LinkedPoint</span>*<span style="color:#000000;"> tail; comp</span>->grey_level = comp2-><span style="color:#000000;">grey_level; history</span>->child =<span style="color:#000000;"> history; </span><span style="color:#008000;">//</span><span style="color:#008000;"> select the winner by size</span> <span style="color:#0000ff;">if</span> (comp1->size >= comp2-><span style="color:#000000;">size) { </span><span style="color:#0000ff;">if</span> (NULL == comp1-><span style="color:#000000;">history) { history</span>->shortcut =<span style="color:#000000;"> history; history</span>->stable = <span style="color:#800080;">0</span><span style="color:#000000;">; } </span><span style="color:#0000ff;">else</span><span style="color:#000000;"> { comp1</span>->history->child =<span style="color:#000000;"> history; history</span>->shortcut = comp1->history-><span style="color:#000000;">shortcut; history</span>->stable = comp1->history-><span style="color:#000000;">stable; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 如果组件2有stable,并且大于1的,则stable使用2的值</span> <span style="color:#0000ff;">if</span> (NULL != comp2->history && comp2->history->stable > history-><span style="color:#000000;">stable) history</span>->stable = comp2->history-><span style="color:#000000;">stable; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 使用数量多的</span> history->val = comp1-><span style="color:#000000;">grey_level; history</span>->size = comp1-><span style="color:#000000;">size; </span><span style="color:#008000;">//</span><span style="color:#008000;"> put comp1 to history</span> comp-><span style="color:#0000ff;">var</span> = comp1-><span style="color:#0000ff;">var</span><span style="color:#000000;">; comp</span>->dvar = comp1-><span style="color:#000000;">dvar; </span><span style="color:#008000;">//</span><span style="color:#008000;"> 如果组件1和2都有像素点,将两个链按照1->2连接在一起</span> <span style="color:#0000ff;">if</span> (comp1->size > <span style="color:#800080;">0</span> && comp2->size > <span style="color:#800080;">0</span><span style="color:#000000;">) { comp1</span>->tail->next = comp2-><span style="color:#000000;">head; comp2</span>->head->prev = comp1-><span style="color:#000000;">tail; } </span><span style="color:#008000;">//</span><span style="color:#008000;"> 确定头尾</span> head = (comp1->size > <span style="color:#800080;">0</span>) ? comp1->head : comp2-><span style="color:#000000;">head; tail </span>= (comp2->size > <span style="color:#800080;">0</span>) ? comp2->tail : comp1-><span style="color:#000000;">tail; </span><span style="color:#008000;">//</span><span style="color:#008000;"> always made the newly added in the last of the pixel list (comp1 ... comp2)</span>
}
else {
// 与上面的正好相反
if (NULL == comp2->history)
{
history->shortcut = history;
history->stable = 0;
}
else {
comp2->history->child = history;
history->shortcut = comp2->history->shortcut;
history->stable = comp2->history->stable;
}
if (NULL != comp1->history && comp1->history->stable > history->stable)
history->stable = comp1->history->stable;
history->val = comp2->grey_level;
history->size = comp2->size;
// put comp2 to history
comp->var = comp2->var;
comp->dvar = comp2->dvar;
if (comp1->size > 0 && comp2->size > 0)
{
comp2->tail->next = comp1->head;
comp1->head->prev = comp2->tail;
}
head </span>= (comp2->size > <span style="color:#800080;">0</span>) ? comp2->head : comp1-><span style="color:#000000;">head;
tail </span>= (comp1->size > <span style="color:#800080;">0</span>) ? comp1->tail : comp2-><span style="color:#000000;">tail;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> always made the newly added in the last of the pixel list (comp2 ... comp1)</span>
}
comp->head = head;
comp->tail = tail;
comp->history = history;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 新ER的像素数量是两个ER项的和</span>
comp->size = comp1->size + comp2-><span style="color:#000000;">size;
}
</span><span style="color:#008000;">/*</span><span style="color:#008000;">* @brief 通过delta计算给定ER项的偏差
</span><span style="color:#008000;">*/</span>
<span style="color:#0000ff;">static</span> <span style="color:#0000ff;">float</span> MSERVariationCalc(MSERConnectedComp* comp, <span style="color:#0000ff;">int</span><span style="color:#000000;"> delta)
{
MSERGrowHistory</span>* history = comp-><span style="color:#000000;">history;
</span><span style="color:#0000ff;">int</span> val = comp-><span style="color:#000000;">grey_level;
</span><span style="color:#0000ff;">if</span> (NULL !=<span style="color:#000000;"> history)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 从快捷路径开始往回找历史,找到灰度差大于delta的历史</span>
MSERGrowHistory* shortcut = history-><span style="color:#000000;">shortcut;
</span><span style="color:#0000ff;">while</span> (shortcut != shortcut->shortcut && shortcut->val + delta ><span style="color:#000000;"> val)
shortcut </span>= shortcut-><span style="color:#000000;">shortcut;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 由于快捷路径是直接跳过一些历史的,要找到最准确的历史还要从以前历史往当前找</span>
MSERGrowHistory* child = shortcut-><span style="color:#000000;">child;
</span><span style="color:#0000ff;">while</span> (child != child->child && child->val + delta <=<span style="color:#000000;"> val)
{
shortcut </span>=<span style="color:#000000;"> child;
child </span>= child-><span style="color:#000000;">child;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> get the position of history where the shortcut->val <= delta+val and shortcut->child->val >= delta+val
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 更新快捷路径</span>
history->shortcut =<span style="color:#000000;"> shortcut;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 返回(R-R(-delta)) / (R-delta)</span>
<span style="color:#0000ff;">return</span> (<span style="color:#0000ff;">float</span>)(comp->size - shortcut->size) / (<span style="color:#0000ff;">float</span>)shortcut-><span style="color:#000000;">size;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> here is a small modification of MSER where cal ||R_{i}-R_{i-delta}||/||R_{i-delta}||
</span><span style="color:#008000;">//</span><span style="color:#008000;"> in standard MSER, cal ||R_{i+delta}-R_{i-delta}||/||R_{i}||
</span><span style="color:#008000;">//</span><span style="color:#008000;"> my calculation is simpler and much easier to implement</span>
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 没有历史,结果为1。也就是没有-delta对应的值。
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 如果按照(R-R(-delta)) / R(-delta) = 1公式推导:
</span><span style="color:#008000;">//</span><span style="color:#008000;"> R = 2R(-delta)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 就面积来说,怎么两倍这种关系都比较奇怪,因为是xy两个维度的,每个维度提高sqrt(2)倍</span>
<span style="color:#0000ff;">return</span> <span style="color:#800080;">1</span><span style="color:#000000;">.;
}
</span><span style="color:#008000;">/*</span><span style="color:#008000;">* @brief 检查是否为最稳定极值区域
</span><span style="color:#008000;">*/</span>
<span style="color:#0000ff;">static</span> <span style="color:#0000ff;">bool</span> MSERStableCheck(MSERConnectedComp* comp, MSERParams <span style="color:#0000ff;">params</span><span style="color:#000000;">)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 检查就是要确定水位的底是否是稳定的
</span><span style="color:#008000;">//</span><span style="color:#008000;"> tricky part: it actually check the stablity of one-step back
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 稳定区域都是由比较而来的,不能没有上一个历史。</span>
<span style="color:#0000ff;">if</span> (comp->history == NULL || comp->history->size <= <span style="color:#0000ff;">params</span>.minArea || comp->history->size >= <span style="color:#0000ff;">params</span><span style="color:#000000;">.maxArea)
</span><span style="color:#0000ff;">return</span> <span style="color:#800080;">0</span><span style="color:#000000;">;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> diversity : (R(-1) - R(stable)) / R(-1)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 使用水位的底与稳定时大小做比较</span>
<span style="color:#0000ff;">float</span> div = (<span style="color:#0000ff;">float</span>)(comp->history->size - comp->history->stable) / (<span style="color:#0000ff;">float</span>)comp->history-><span style="color:#000000;">size;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> variation</span>
<span style="color:#0000ff;">float</span> <span style="color:#0000ff;">var</span> = MSERVariationCalc(comp, <span style="color:#0000ff;">params</span><span style="color:#000000;">.delta);
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 现在的variation要大于以前的variation,就是以前的更稳定
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 灰度值差是否大于1</span>
<span style="color:#0000ff;">int</span> dvar = (comp-><span style="color:#0000ff;">var</span> < <span style="color:#0000ff;">var</span> || (unsigned <span style="color:#0000ff;">long</span>)(comp->history->val + <span style="color:#800080;">1</span>) < comp-><span style="color:#000000;">grey_level);
</span><span style="color:#0000ff;">int</span> stable = (dvar && !comp->dvar && comp-><span style="color:#0000ff;">var</span> < <span style="color:#0000ff;">params</span>.maxVariation && div > <span style="color:#0000ff;">params</span><span style="color:#000000;">.minDiversity);
comp</span>-><span style="color:#0000ff;">var</span> = <span style="color:#0000ff;">var</span><span style="color:#000000;">;
comp</span>->dvar =<span style="color:#000000;"> dvar;
</span><span style="color:#0000ff;">if</span><span style="color:#000000;"> (stable)
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 如果稳定的话,稳定值就是像素数</span>
comp->history->stable = comp->history-><span style="color:#000000;">size;
</span><span style="color:#0000ff;">return</span> stable != <span style="color:#800080;">0</span><span style="color:#000000;">;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> add a pixel to the pixel list</span>
<span style="color:#008000;">/*</span><span style="color:#008000;">* @brief 添加像素到给定的MSER项中
</span><span style="color:#008000;">*/</span>
<span style="color:#0000ff;">static</span> <span style="color:#0000ff;">void</span> accumulateMSERComp(MSERConnectedComp* comp, LinkedPoint*<span style="color:#000000;"> point)
{
</span><span style="color:#0000ff;">if</span> (comp->size > <span style="color:#800080;">0</span><span style="color:#000000;">)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 之前有像素,连接到原来像素的链上</span>
point->prev = comp-><span style="color:#000000;">tail;
comp</span>->tail->next =<span style="color:#000000;"> point;
point</span>->next =<span style="color:#000000;"> NULL;
}
</span><span style="color:#0000ff;">else</span><span style="color:#000000;"> {
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 第一个像素</span>
point->prev =<span style="color:#000000;"> NULL;
point</span>->next =<span style="color:#000000;"> NULL;
comp</span>->head =<span style="color:#000000;"> point;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 新加入的点作为尾巴</span>
comp->tail =<span style="color:#000000;"> point;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 像素数自增</span>
comp->size++<span style="color:#000000;">;
}
</span><span style="color:#008000;">//</span><span style="color:#008000;"> convert the point set to CvSeq</span>
<span style="color:#0000ff;">static</span> CvContour* MSERToContour(MSERConnectedComp* comp, CvMemStorage*<span style="color:#000000;"> storage)
{
CvSeq</span>* _contour = cvCreateSeq(CV_SEQ_KIND_GENERIC | CV_32SC2, <span style="color:#0000ff;">sizeof</span>(CvContour), <span style="color:#0000ff;">sizeof</span><span style="color:#000000;">(CvPoint), storage);
CvContour</span>* contour = (CvContour*<span style="color:#000000;">)_contour;
</span><span style="color:#008000;">//</span><span style="color:#008000;"> 上次历史就是水位的底,将水位的底都添加到轮廓中</span>
cvSeqPushMulti(_contour, <span style="color:#800080;">0</span>, comp->history-><span style="color:#000000;">size);
LinkedPoint</span>* lpt = comp-><span style="color:#000000;">head;
</span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < comp->history->size; i++<span style="color:#000000;">)
{
CvPoint</span>* pt =<span style="color:#000000;"> CV_GET_SEQ_ELEM(CvPoint, _contour, i);
pt</span>->x = lpt-><span style="color:#000000;">pt.x;
pt</span>->y = lpt-><span style="color:#000000;">pt.y;
lpt </span>= lpt-><span style="color:#000000;">next;
}
cvBoundingRect(contour);
</span><span style="color:#0000ff;">return</span><span style="color:#000000;"> contour;
}</span></pre>
p.s. 以上代码有点长了:(
应用
下面对一些图片做实验,测试下mser的检出能力。
// 加载图像 Mat srcColor = imread("");</span><span style="color:#008000;">//</span><span style="color:#008000;">创建MSER类 </span> MSER ms(<span style="color:#800080;">4</span> <span style="color:#008000;">//</span><span style="color:#008000;"> delta</span> , <span style="color:#800080;">60</span> <span style="color:#008000;">//</span><span style="color:#008000;"> min area</span> , <span style="color:#800080;">1600</span> <span style="color:#008000;">//</span><span style="color:#008000;"> max area</span> , <span style="color:#800080;">0.05f</span> <span style="color:#008000;">//</span><span style="color:#008000;"> max variation </span> , <span style="color:#800080;">0.4f</span> <span style="color:#008000;">//</span><span style="color:#008000;"> min diversity </span> ); <span style="color:#008000;">//</span><span style="color:#008000;"> edge blur size </span><span style="color:#008000;">//</span><span style="color:#008000;"> 转换为灰度图</span>
Mat srcGray;
cvtColor(srcColor, srcGray, CV_BGR2GRAY);
</span><span style="color:#008000;">//</span><span style="color:#008000;">用于组块区域的像素点集 </span>
vector<vector<Point>><span style="color:#000000;"> regions;
ms(srcGray, regions, Mat());
</span><span style="color:#0000ff;">for</span> (<span style="color:#0000ff;">int</span> i = <span style="color:#800080;">0</span>; i < regions.size(); i++<span style="color:#000000;">)
{
</span><span style="color:#008000;">//</span><span style="color:#008000;">用连线绘制 </span>
<span style="color:#808080;">///</span><span style="color:#008000;">/polylines(srcGray, regions[i], true, Scalar(0, 0, 255));</span>
<span style="color:#008000;">//</span><span style="color:#008000;">用椭圆形绘制 </span>
ellipse(srcColor, fitEllipse(regions[i]), Scalar(<span style="color:#800080;">0</span>, <span style="color:#800080;">0</span>, <span style="color:#800080;">255</span>), <span style="color:#800080;">1</span><span style="color:#000000;">);
}</span></pre>




可以看出mser对旋转和不同大小的字符都有一定的检出能力,但如果想对不同灰度变化也有能力,应该修改源码来适应了。
下次介绍mscr,用于在彩色图种查找稳定区域。