1.LBP
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征;
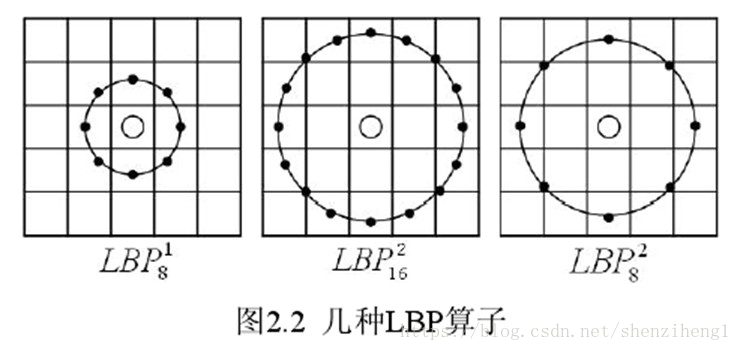
1.1 圆形LBP算子
基本的 LBP算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对 LBP 算子进行了改进,将 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子:
1.2 旋转不变的LBP
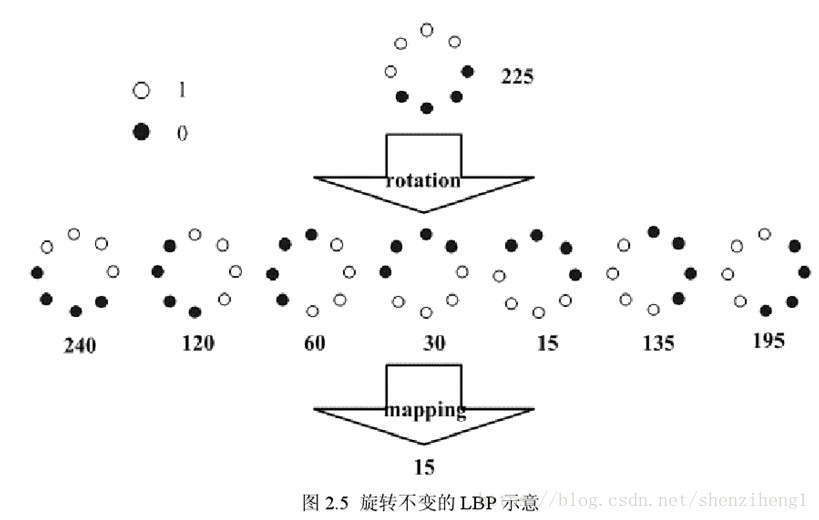
从 LBP 的定义可以看出,LBP 算子是灰度不变的,但却不是旋转不变的。图像的旋转就会得到不同的 LBP值。
Maenpaa等人又将 LBP算子进行了扩展,提出了具有旋转不变性的 LBP 算子,即不断旋转圆形邻域得到一系列初始定义的 LBP值,取其最小值作为该邻域的 LBP 值。
下图给出了求取旋转不变的 LBP 的过程示意图,图中算子下方的数字表示该算子对应的 LBP值,图中所示的 8 种 LBP模式,经过旋转不变的处理,最终得到的具有旋转不变性的 LBP值为 15。也就是说,图中的 8种 LBP 模式对应的旋转不变的 LBP模式都是00001111。
2.HOG
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。
与其他的特征描述方法相比,HOG有很多优点。首先,由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果(对于发生较大形变,HOG特征表现乏力)。因此HOG特征是特别适合于做图像中的人体检测的。

3.FAST(角点检测器)
Edward Rosten和Tom Drummond在2006年发表的“Machine learning for high-speed corner detection”文章中提出了一种FAST特征,并在2010年对这篇论文作了小幅度的修改后重新发表。FAST的全称为Features From Accelerated Segment Test。Rosten等人将FAST角点定义为:若某像素点与其周围领域内足够多的像素点处于不同的区域,则该像素点可能为角点。也就是某些属性与众不同,考虑灰度图像,即若该点的灰度值比其周围领域内足够多的像素点的灰度值大或者小,则该点可能为角点。
FAST算法比其他已知的角点检测算法要快很多倍,但是当图片中的噪点较多时,它的健壮性并不好,而且算法的效果还依赖于一个阈值tt。而且FAST不产生多尺度特征而且FAST特征点没有方向信息,这样就会失去旋转不变性。
引用:http://www.cnblogs.com/ronny/p/4078710.html
4.SIFT/SURF(特征点检测器)
http://www.cnblogs.com/ronny/p/4028776.html
http://www.cnblogs.com/ronny/p/4045979.html
如果说SIFT算法中使用DOG对LOG进行了简化,提高了搜索特征点的速度,那么SURF算法则是对DoH的简化与近似。虽然SIFT算法已经被认为是最有效的,也是最常用的特征点提取的算法,但如果不借助于硬件的加速和专用图像处理器的配合,SIFT算法以现有的计算机仍然很难达到实时的程度。对于需要实时运算的场合,如基于特征点匹配的实时目标跟踪系统,每秒要处理8-24帧的图像,需要在毫秒级内完成特征点的搜索、特征矢量生成、特征矢量匹配、目标锁定等工作,这样SIFT算法就很难适应这种需求了。SURF借鉴了SIFT中简化近似的思想,把DoH中的高斯二阶微分模板进行了简化,使得模板对图像的滤波只需要进行几个简单的加减法运算,并且,这种运算与滤波器的尺度无关。实验证明,SURF算法较SIFT在运算速度上要快3倍左右。
5.MSER(最大稳定区域检测器)
最大稳定极值区域(MSER-Maximally Stable Extremal Regions)可以用于图像的斑点区域检测。该算法最早是由Matas等人于2002年提出,它是基于分水岭的概念。
MSER的基本原理是对一幅灰度图像(灰度值为0~255)取阈值进行二值化处理,阈值从0到255依次递增。阈值的递增类似于分水岭算法中的水面的上升,随着水面的上升,有一些较矮的丘陵会被淹没,如果从天空往下看,则大地分为陆地和水域两个部分,这类似于二值图像。在得到的所有二值图像中,图像中的某些连通区域变化很小,甚至没有变化,则该区域就被称为最大稳定极值区域。这类似于当水面持续上升的时候,有些被水淹没的地方的面积没有变化。
https://blog.csdn.net/tcorpion/article/details/73326833
6.MinEngen (角点检测器)
7.Brisk
BRISK算法是2011年ICCV上《BRISK:Binary Robust Invariant Scalable Keypoints》文章中,提出来的一种特征提取算法,也是一种二进制的特征描述算子。
它具有较好的旋转不变性、尺度不变性,较好的鲁棒性。在图像配准应用中,速度比较:SIFT>SURF>BRISK>FREAK>ORB,在对有较大模糊的图像配准时,BRISK算法在其中表现最为出色。
http://www.mamicode.com/info-detail-940675.html
https://blog.csdn.net/luoshixian099/article/details/50731801