1.Acknowledgement
本篇文章中神经网络的结构主要来自于DeepMind的这篇论文
https://www.cs.toronto.edu/~vmnih/docs/dqn.pdf
2. 实现效果
我们要实现的这个游戏,在openai的gym里面,叫做breakout,使用的是v3版本,初始化环境的时候需要声明一下
我们想要实现的效果,基本上是这样的
输入就是每一帧的图像,输出是当前应该采取的动作
一开始agent只会做随机的运动,在训练了一段时间之后,就可以精准的接住球了
3. 基本框架
基本框架这之前基本相同,都是采用Q-Learning算法
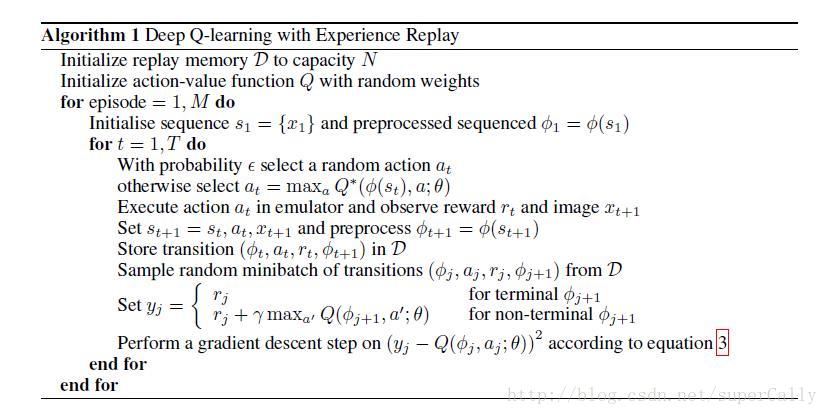
具体解释看这篇文章
http://blog.csdn.net/supercally/article/details/54767499
4. 与之前简单版本的区别
最大的区别有这几点:
1. 输入是原始的图像数据
输入是210 * 160 * 3的图像,我们稍作处理,把边上不需要的像素去掉之后降阶采样灰度化,将80 * 80 * 1的图像作为算法的输入
2. 用最近的四帧的序列作为输入
神经网络的输入不是单帧的图像,而是最近的连续四帧图像作为输入。这也很好理解,因为这样就加入了时间序列。对于打砖块这个游戏,如果只用一帧作输入的话,虽然砖块在同一个位置,但是可能是向好几个方向运动的,agent无法判断它的价值。
但是如果我们添加了最近几帧,agent就可以根据前后的时间判断出是向哪个方向运动的,这个状态就完整了
3. 卷积神经网络的结构
在用神经网络判断价值方面,与之前不同。之前简单的训练网络是用了一个隐层的网络来实现的,但是对于处理图像的任务,我们使用的是卷积神经网络
使用的网络的结构是这样的
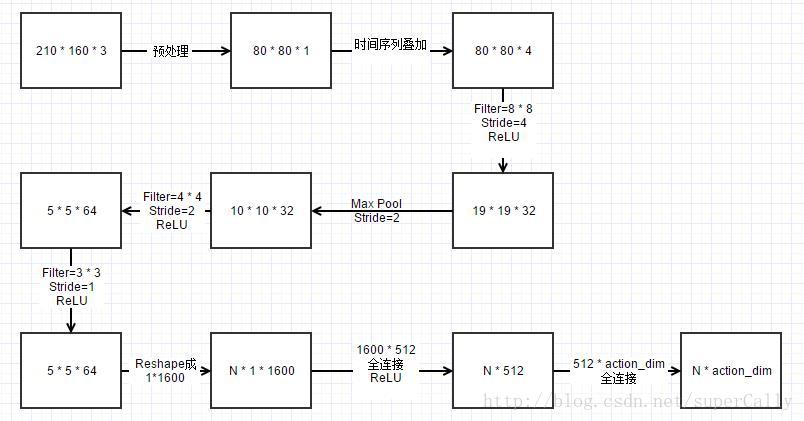
卷积神经网络的大小这样计算
最后算出最后一个卷积层的大小是5 * 5,深度是64,所以先reshape成一组1600维的向量,就是原来的一个输入,然后再进行全连接就可以了。再经过两层全连接,得到的action_dim大小的向量,每一维就代表相应action的价值
其他的都和我们在前一篇文章里提到的大致一样。因为是图像作为输入,所以训练时间比较长,对于这个游戏,基本上训练一天以上,就能看出学习的效果有明显的增长
5.代码
按照惯例,附上代码
import sys
import cv2
import cv2.cv as cv
import gym
import tensorflow as tf
import numpy as np
import random
from collections import deque
CNN_INPUT_WIDTH = 80
CNN_INPUT_HEIGHT = 80
CNN_INPUT_DEPTH = 1
SERIES_LENGTH = 4
REWARD_COFF = 3.0
INITIAL_EPSILON = 1.0
FINAL_EPSILON = 0.0001
REPLAY_SIZE = 50000
BATCH_SIZE = 32
GAMMA = 0.99
OBSERVE_TIME = 500
ENV_NAME = 'Breakout-v3'
EPISODE = 100000
STEP = 1500
TEST = 10
class ImageProcess():
def ColorMat2B(self,state): # this is the function used for the game flappy bird
height = 80
width = 80
state_gray = cv2.cvtColor( cv2.resize( state, ( height, width ) ) , cv2.COLOR_BGR2GRAY )
_,state_binary = cv2.threshold( state_gray, 5, 255, cv2.THRESH_BINARY )
state_binarySmall = cv2.resize( state_binary, ( width, height ))
cnn_inputImage = state_binarySmall.reshape( ( height, width ) )
return cnn_inputImage
def ColorMat2Binary(self, state):
# state_output = tf.image.rgb_to_grayscale(state_input)
# state_output = tf.image.crop_to_bounding_box(state_output, 34, 0, 160, 160)
# state_output = tf.image.resize_images(state_output, 80, 80, method=tf.image.ResizeMethod.NEAREST_NEIGHBOR)
# state_output = tf.squeeze(state_output)
# return state_output
height = state.shape[0]
width = state.shape[1]
nchannel = state.shape[2]
sHeight = int(height * 0.5)
sWidth = CNN_INPUT_WIDTH
state_gray = cv2.cvtColor(state, cv2.COLOR_BGR2GRAY)
# print state_gray.shape
# cv2.imshow('test2', state_gray)
# cv2.waitKey(0)
_, state_binary = cv2.threshold(state_gray, 5, 255, cv2.THRESH_BINARY)
state_binarySmall = cv2.resize(state_binary, (sWidth, sHeight), interpolation=cv2.INTER_AREA)
cnn_inputImg = state_binarySmall[25:, :]
# rstArray = state_graySmall.reshape(sWidth * sHeight)
cnn_inputImg = cnn_inputImg.reshape((CNN_INPUT_WIDTH, CNN_INPUT_HEIGHT))
# print cnn_inputImg.shape
return cnn_inputImg
def ShowImageFromNdarray(self, state, p):
imgs = np.ndarray(shape=(4, 80, 80))
for i in range(0, 80):
for j in range(0, 80):
for k in range(0, 4):
imgs[k][i][j] = state[i][j][k]
cv2.imshow(str(p + 1), imgs[0])
cv2.imshow(str(p + 2), imgs[1])
cv2.imshow(str(p + 3), imgs[2])
cv2.imshow(str(p + 4), imgs[3])
class DQN():
def __init__(self, env):
self.imageProcess = ImageProcess()
self.epsilon = INITIAL_EPSILON
self.replay_buffer = deque()
self.recent_history_queue = deque()
self.action_dim = env.action_space.n
self.state_dim = CNN_INPUT_HEIGHT * CNN_INPUT_WIDTH
self.time_step = 0
self.session = tf.InteractiveSession()
self.create_network()
# self.create_training_method()
self.observe_time = 0
self.merged = tf.merge_all_summaries()
self.summary_writer = tf.train.SummaryWriter('/path/to/logs', self.session.graph)
self.session.run(tf.initialize_all_variables())
def create_network(self):
INPUT_DEPTH = SERIES_LENGTH
self.input_layer = tf.placeholder(tf.float32, [None, CNN_INPUT_WIDTH, CNN_INPUT_HEIGHT, INPUT_DEPTH],
name='status-input')
self.action_input = tf.placeholder(tf.float32, [None, self.action_dim])
self.y_input = tf.placeholder(tf.float32, [None])
W1 = self.get_weights([8, 8, 4, 32])
b1 = self.get_bias([32])
h_conv1 = tf.nn.relu(tf.nn.conv2d(self.input_layer, W1, strides=[1, 4, 4, 1], padding='SAME') + b1)
conv1 = tf.nn.max_pool(h_conv1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
W2 = self.get_weights([4, 4, 32, 64])
b2 = self.get_bias([64])
h_conv2 = tf.nn.relu(tf.nn.conv2d(conv1, W2, strides=[1, 2, 2, 1], padding='SAME') + b2)
# conv2 = tf.nn.max_pool( h_conv2, ksize = [ 1, 2, 2, 1 ], strides= [ 1, 2, 2, 1 ], padding= 'SAME' )
W3 = self.get_weights([3, 3, 64, 64])
b3 = self.get_bias([64])
h_conv3 = tf.nn.relu(tf.nn.conv2d(h_conv2, W3, strides=[1, 1, 1, 1], padding='SAME') + b3)
# conv3 = tf.nn.max_pool( h_conv3, ksize= [ 1,2,2,1], strides=[ 1,2,2,1 ],padding= 'SAME' )
W_fc1 = self.get_weights([1600, 512])
b_fc1 = self.get_bias([512])
# h_conv2_flat = tf.reshape( h_conv2, [ -1, 11 * 11 * 32 ] )
conv3_flat = tf.reshape(h_conv3, [-1, 1600])
h_fc1 = tf.nn.relu(tf.matmul(conv3_flat, W_fc1) + b_fc1)
W_fc2 = self.get_weights([512, self.action_dim])
b_fc2 = self.get_bias([self.action_dim])
self.Q_value = tf.matmul(h_fc1, W_fc2) + b_fc2
Q_action = tf.reduce_sum(tf.mul(self.Q_value, self.action_input), reduction_indices=1)
self.cost = tf.reduce_mean(tf.square(self.y_input - Q_action))
self.optimizer = tf.train.AdamOptimizer(1e-6).minimize(self.cost)
# def create_training_method(self):
#
# # if len(self.recent_history_queue) > 4:
# # sess = tf.Session()
# # print sess.run(self.Q_value)
# # global_step = tf.Variable(0, name='global_step', trainable=True)
# # self.optimizer = tf.train.AdamOptimizer( 0.001 ).minimize( self.cost )
def train_network(self):
self.time_step += 1
minibatch = random.sample(self.replay_buffer, BATCH_SIZE)
state_batch = [data[0] for data in minibatch]
action_batch = [data[1] for data in minibatch]
reward_batch = [data[2] for data in minibatch]
next_state_batch = [data[3] for data in minibatch]
done_batch = [data[4] for data in minibatch]
# self.imageProcess.ShowImageFromNdarray( state_batch[0], 1 )
y_batch = []
Q_value_batch = self.Q_value.eval(feed_dict={self.input_layer: next_state_batch})
# print Q_value_batch
# print self.time_step
# cv2.waitKey(0)
# print Q_value_batch.shape
for i in xrange(BATCH_SIZE):
if done_batch[i]:
y_batch.append(reward_batch[i])
else:
y_batch.append(reward_batch[i] + GAMMA * np.max(Q_value_batch[i]))
self.optimizer.run(feed_dict={
self.input_layer: state_batch,
self.action_input: action_batch,
self.y_input: y_batch
})
def percieve(self, state_shadow, action_index, reward, state_shadow_next, done, episode):
action = np.zeros( self.action_dim )
action[ action_index ] = 1
self.replay_buffer.append([state_shadow, action, reward, state_shadow_next, done])
self.observe_time += 1
if self.observe_time % 1000 and self.observe_time <= OBSERVE_TIME == 0:
print self.observe_time
if len(self.replay_buffer) > REPLAY_SIZE:
self.replay_buffer.popleft()
if len(self.replay_buffer) > BATCH_SIZE and self.observe_time > OBSERVE_TIME:
self.train_network()
def get_greedy_action(self, state_shadow):
rst = self.Q_value.eval(feed_dict={self.input_layer: [state_shadow]})[0]
# print rst
print np.max( rst )
return np.argmax(rst)
def get_action(self, state_shadow):
if self.epsilon >= FINAL_EPSILON and self.observe_time > OBSERVE_TIME:
self.epsilon -= (INITIAL_EPSILON - FINAL_EPSILON) / 10000
action = np.zeros(self.action_dim)
action_index = None
if random.random() < self.epsilon:
action_index = random.randint(0, self.action_dim - 1)
else:
action_index = self.get_greedy_action(state_shadow)
return action_index
def get_weights(self, shape):
weight = tf.truncated_normal(shape, stddev=0.01)
return tf.Variable(weight)
def get_bias(self, shape):
bias = tf.constant(0.01, shape=shape)
return tf.Variable(bias)
def main():
env = gym.make(ENV_NAME)
state_shadow = None
next_state_shadow = None
agent = DQN(env)
total_reward_decade = 0
# game_state = game.GameState()
for episode in xrange(EPISODE):
total_reward = 0
state = env.reset()
state = agent.imageProcess.ColorMat2Binary(state) # now state is a binary image of 80 * 80
state_shadow = np.stack((state, state, state, state), axis=2)
for step in xrange(STEP):
env.render()
action = agent.get_action(state_shadow)
next_state, reward, done, _ = env.step(action)
next_state = np.reshape( agent.imageProcess.ColorMat2Binary( next_state ), ( 80,80,1 ) )
# print next_state.shape
# print state_shadow.shape
next_state_shadow = np.append( next_state, state_shadow[ :,:,:3 ], axis= 2 )
total_reward += reward
agent.percieve(state_shadow, action, reward, next_state_shadow, done, episode)
state_shadow = next_state_shadow
if done:
break
print 'Episode:', episode, 'Total Point this Episode is:', total_reward
total_reward_decade += total_reward
if episode % 10 == 0:
print '-------------'
print 'Decade:', episode / 10, 'Total Reward in this Decade is:', total_reward_decade
print '-------------'
total_reward_decade = 0
if __name__ == '__main__':
main()然后就可以等着算法Enjoy Itself 啦!