版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/weixin_37251044/article/details/82057354
1.罗德里格斯变换[利群李代数变换]
罗德里格斯变换
opencv中solvePnPRansac函数求解相机位姿
//1.首先通过罗德里格斯变换将旋转向量rvec转换成3*3的旋转矩阵r
cv::Mat R;
cv::Rodrigues(rvec, R);
Eigen::Matrix3d r;
cv::cv2eigen(R, r);2.LDLT分解法(求Ax=B的x)
A.ldlt().solve ( B )3.高斯金字塔
buildPyramid函数:
函数的调用方式:
void buildPyramid(InputArray src, OutputArrayOfArrays dst, int maxlevel, int borderType=BORDER_DEFAULT )
函数参数的详解:
第一个参数:InputArray src输入图像
第二个参数: OutputArrayOfArrays dst输出图像
第三个参数:int maxlevel 表示建立金字塔的层数
第四个参数:int borderType=BORDER_DEFAULT 表示对边界的处理方式
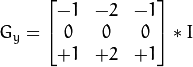
4.Sobel 导数
Sobel ( CV_16S, 1, 0, sobelSize );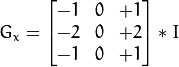


5.深度和通道的理解
矩阵数据类型:
– CV_(S|U|F)C
S = 符号整型 U = 无符号整型 F = 浮点型
E.g.:
CV_8UC1 是指一个8位无符号整型单通道矩阵,
CV_32FC2是指一个32位浮点型双通道矩阵
CV_8UC1 CV_8SC1 CV_16U C1 CV_16SC1
CV_8UC2 CV_8SC2 CV_16UC2 CV_16SC2
CV_8UC3 CV_8SC3 CV_16UC3 CV_16SC3
CV_8UC4 CV_8SC4 CV_16UC4 CV_16SC4
CV_32SC1 CV_32FC1 CV_64FC1
CV_32SC2 CV_32FC2 CV_64FC2
CV_32SC3 CV_32FC3 CV_64FC3
CV_32SC4 CV_32FC4 CV_64FC4
其中,通道表示每个点能存放多少个数,类似于RGB彩色图中的每个像素点有三个值,即三通道的。
图片中的深度表示每个值由多少位来存储,是一个精度问题,一般图片是8bit(位)的,则深度是8.