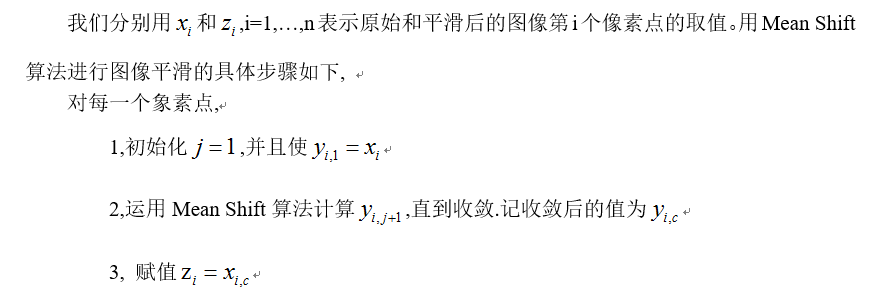
1. 原理
用meanshift做图像平滑和分割,其实是一回事。其本质是经过迭代,将收敛点的像素值代替原来的像素值,从而去除了局部相似的纹理,同时保留了边缘等差异较大的特征。
OpenCV中自带有基于meanshift的分割方法pyrMeanShiftFiltering()。由函数名pyrMeanShiftFiltering可知,这里是将meanshift算法和图像金字塔相结合用来分割的。
<span style="font-size:18px;">void PyrMeanShiftFiltering( const CvArr* srcarr, //输入图像
CvArr* dstarr, //输出图像
double sp, //颜色域半径
double sr, //空间域半径
int max_level, //金字塔最大层数
CvTermCriteria termcrit ) //迭代终止条件</span>要求输入和输出图像都是CV_8UC3类型,而且两者尺寸一样。实际上并不需要去先定义dstarr,因为程序里会将srcarr的格式赋值给dstarr。
termcrit有三种情况,迭代次数、迭代精度和两者同时满足。默认为迭代次数为5同时迭代精度为1。termcrit是个结构体,其结构如下
<span style="font-size:18px;">typedef struct CvTermCriteria
{
int type; /*CV_TERMCRIT_ITER或CV_TERMCRIT_EPS 或二者都是*/
int max_iter; /* 最大迭代次数 */
double epsilon; /* 结果的精确性 */
}
CvTermCriteria;</span>在实际操作时,为了使分割的结果显示得更明显,经常用floodFill( )将不同连通域涂上不同的颜色。具体情况参看下 面的实例。
2. 程序实例
来看看OpenCV自带的一个用meanshift进行分割的例子
原程序见 “ .\OpenCV249\sources\samples\cpp\meanshift_segmentation.cpp”
<span style="font-size:18px;">#include "opencv2/highgui/highgui.hpp"
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static void help(char** argv)
{
cout << "\nDemonstrate mean-shift based color segmentation in spatial pyramid.\n"
<< "Call:\n " << argv[0] << " image\n"
<< "This program allows you to set the spatial and color radius\n"
<< "of the mean shift window as well as the number of pyramid reduction levels explored\n"
<< endl;
}
//This colors the segmentations
static void floodFillPostprocess( Mat& img, const Scalar& colorDiff=Scalar::all(1) )
{
CV_Assert( !img.empty() );
RNG rng = theRNG();
Mat mask( img.rows+2, img.cols+2, CV_8UC1, Scalar::all(0) );
for( int y = 0; y < img.rows; y++ )
{
for( int x = 0; x < img.cols; x++ )
{
if( mask.at<uchar>(y+1, x+1) == 0 )
{
Scalar newVal( rng(256), rng(256), rng(256) );
floodFill( img, mask, Point(x,y), newVal, 0, colorDiff, colorDiff );
}
}
}
}
string winName = "meanshift";
int spatialRad, colorRad, maxPyrLevel;
Mat img, res;
static void meanShiftSegmentation( int, void* )
{
cout << "spatialRad=" << spatialRad << "; "
<< "colorRad=" << colorRad << "; "
<< "maxPyrLevel=" << maxPyrLevel << endl;
pyrMeanShiftFiltering( img, res, spatialRad, colorRad, maxPyrLevel );
//Mat imgGray;
//cvtColor(res,imgGray,CV_RGB2GRAY);
//imshow("res",res);
floodFillPostprocess( res, Scalar::all(2) );
imshow( winName, res );
}
int main(int argc, char** argv)
{
img = imread("rubberwhale1.png");
//img = imread("pic2.png");
if( img.empty() )
return -1;
spatialRad = 10;
colorRad = 10;
maxPyrLevel = 1;
namedWindow( winName, WINDOW_AUTOSIZE );
//imshow("img",img);
createTrackbar( "spatialRad", winName, &spatialRad, 80, meanShiftSegmentation );
createTrackbar( "colorRad", winName, &colorRad, 60, meanShiftSegmentation );
createTrackbar( "maxPyrLevel", winName, &maxPyrLevel, 5, meanShiftSegmentation );
meanShiftSegmentation(0, 0);
//floodFillPostprocess( img, Scalar::all(2) );
//imshow("img2",img);
waitKey();
return 0;
}</span>int floodFill( InputOutputArray image, Point seedPoint, Scalar newVal, CV_OUT Rect* rect=0, Scalar loDiff=Scalar(), Scalar upDiff=Scalar(), int flags=4 );
int floodFill( InputOutputArray image, InputOutputArray mask, Point seedPoint, Scalar newVal, CV_OUT Rect* rect=0, Scalar loDiff=Scalar(), Scalar upDiff=Scalar(), int flags=4 );
InputOutputArray image 输入输出图像,要求格式为1通道或3通道,8位或浮点
InputOutputArray mask 掩膜,比image的宽和高各大两像素点
Point seedPoint 填充的起始点
Scalar newVal 像素点被染色的值
CV_OUT Rect* rect=0 可选参数,设置floodFill()要重绘区域的最小边界矩形区域
Scalar loDiff=Scalar() 定义当前像素值与起始点像素值的亮度或颜色负差的最大值
Scalar upDiff=Scalar() 定义当前像素值与起始点像素值的亮度或颜色正差的最大值
flags 操作标志符
程序结果
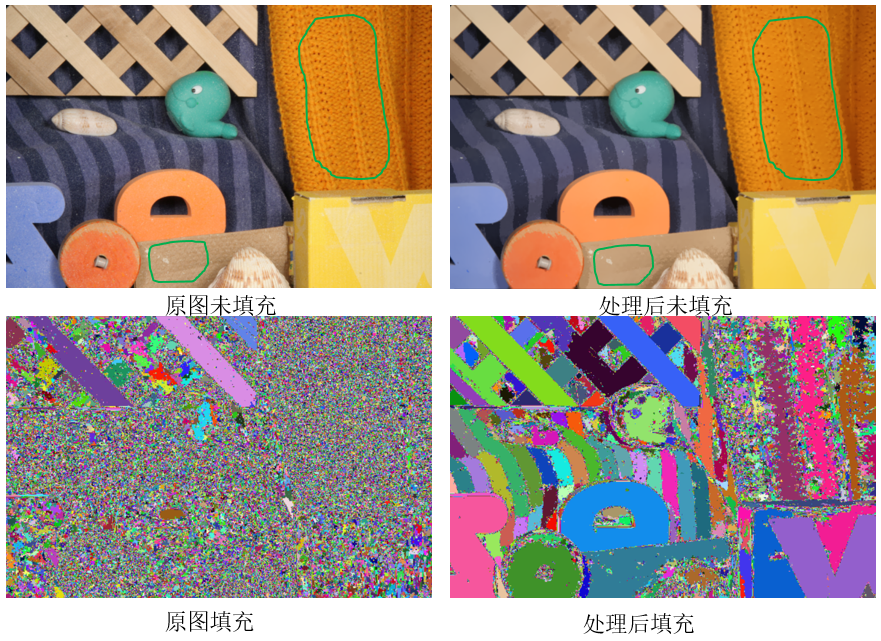
处理后一些细小的纹理都平滑掉了,例如图中绿色线条所指示的区域。未填充时,很多地方看得并不明显,填充后就能明显看出差别来了。填充后的图很好地体现了meanshift聚类的思想!
再来看一组更“夸张”的效果图
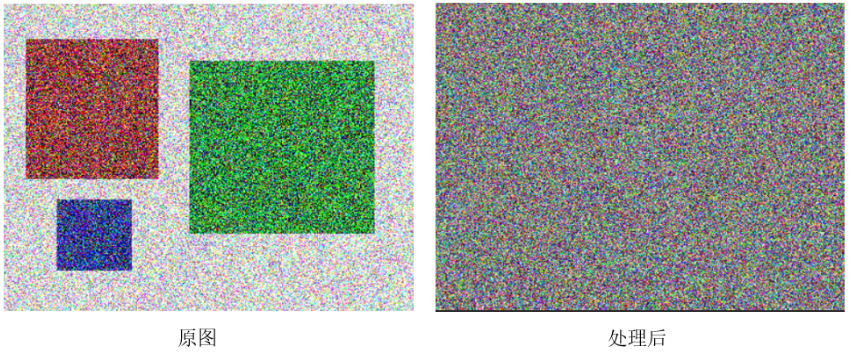
使用meanshift方法进行处理后,原来的三个矩形区域消失了!平滑掉了!
meanshift算法的两个关键参数是空间域半径sr和颜色域半径sp,别说max_level,那是构建图像金字塔的参数好吧。最后,我们来看看sr和sp对结果的影响。
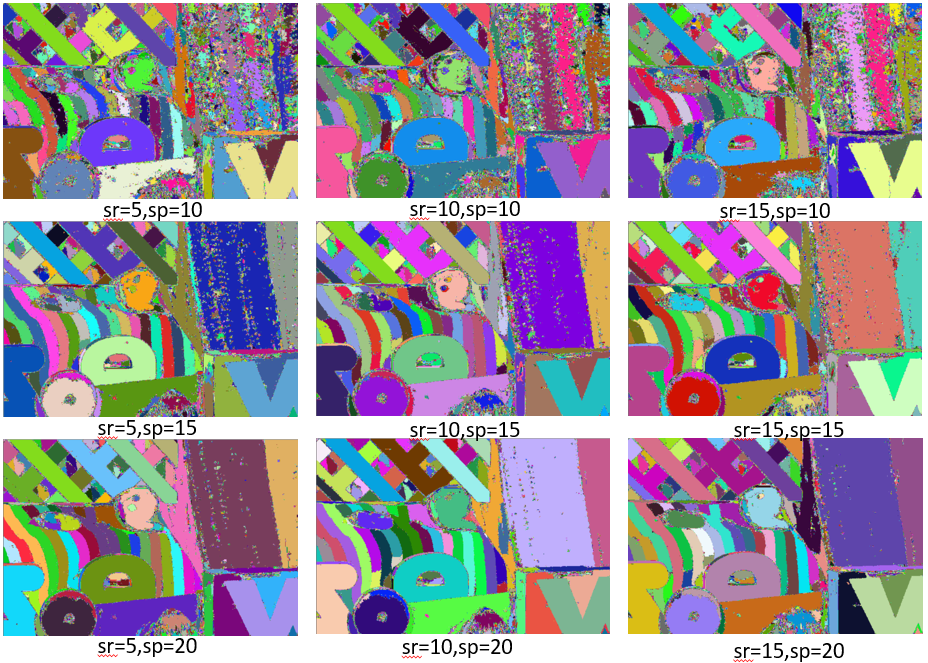
显然颜色域半径sp对结果的影响比空间域半径sr对结果的影响大。sp和sr越小,细节保留得越多,sp和sr越大,平滑力度越大。边缘和颜色突变的区域的特征保留的较好。因为meanshift要对每个像素点进行操作,所以算法的时间花销很大。
3. 深入代码
<span style="font-size:14px;">/****************************************************************************************\
* Meanshift *
\****************************************************************************************/
CV_IMPL void
cvPyrMeanShiftFiltering( const CvArr* srcarr, CvArr* dstarr,
double sp0, double sr, int max_level,
CvTermCriteria termcrit )
{
const int cn = 3;
const int MAX_LEVELS = 8;
if( (unsigned)max_level > (unsigned)MAX_LEVELS )
CV_Error( CV_StsOutOfRange, "The number of pyramid levels is too large or negative" ); //限定max_level不超过8
std::vector<cv::Mat> src_pyramid(max_level+1); //+1是因为原始图和最终图都定义为图像金字塔的第0层
std::vector<cv::Mat> dst_pyramid(max_level+1);
cv::Mat mask0;
int i, j, level;
//uchar* submask = 0;
#define cdiff(ofs0) (tab[c0-dptr[ofs0]+255] + \
tab[c1-dptr[(ofs0)+1]+255] + tab[c2-dptr[(ofs0)+2]+255] >= isr22)
double sr2 = sr * sr;
int isr2 = cvRound(sr2), isr22 = MAX(isr2,16);
int tab[768];
cv::Mat src0 = cv::cvarrToMat(srcarr); //arr转Mat
cv::Mat dst0 = cv::cvarrToMat(dstarr);
//确保src和dst都是CV_8UC3,且同尺寸
if( src0.type() != CV_8UC3 )
CV_Error( CV_StsUnsupportedFormat, "Only 8-bit, 3-channel images are supported" );
if( src0.type() != dst0.type() )
CV_Error( CV_StsUnmatchedFormats, "The input and output images must have the same type" );
if( src0.size() != dst0.size() )
CV_Error( CV_StsUnmatchedSizes, "The input and output images must have the same size" );
//确保迭代次数在1到100次,默认则为5;迭代精度默认为1.
if( !(termcrit.type & CV_TERMCRIT_ITER) )
termcrit.max_iter = 5;
termcrit.max_iter = MAX(termcrit.max_iter,1);
termcrit.max_iter = MIN(termcrit.max_iter,100);
if( !(termcrit.type & CV_TERMCRIT_EPS) )
termcrit.epsilon = 1.f;
termcrit.epsilon = MAX(termcrit.epsilon, 0.f);
for( i = 0; i < 768; i++ )
tab[i] = (i - 255)*(i - 255); //tab[]存的是(-255)^2到512^2
// 1. 构造金字塔
src_pyramid[0] = src0;
dst_pyramid[0] = dst0;
for( level = 1; level <= max_level; level++ )
{
//src_pyramid和dst_pyramid尺寸一样,下一层是上一层尺寸的一半
src_pyramid[level].create( (src_pyramid[level-1].rows+1)/2,
(src_pyramid[level-1].cols+1)/2, src_pyramid[level-1].type() );
dst_pyramid[level].create( src_pyramid[level].rows,
src_pyramid[level].cols, src_pyramid[level].type() );
//对src_pyramid[level-1]下采样,结果存入src_pyramid[level]
cv::pyrDown( src_pyramid[level-1], src_pyramid[level], src_pyramid[level].size() );
//CV_CALL( cvResize( src_pyramid[level-1], src_pyramid[level], CV_INTER_AREA ));
}
mask0.create(src0.rows, src0.cols, CV_8UC1);
//CV_CALL( submask = (uchar*)cvAlloc( (sp+2)*(sp+2) ));
// 2. 从顶层(最小层)开始应用meanshift算法。
for( level = max_level; level >= 0; level-- )
{
cv::Mat src = src_pyramid[level];
cv::Size size = src.size();
uchar* sptr = src.data; //sptr指向图像矩阵的起始地址,也就是第一行的起始地址
int sstep = (int)src.step; //sstep是图像矩阵每一行的长度(以字节为单位),以便后面计算地址
uchar* mask = 0;
int mstep = 0;
uchar* dptr;
int dstep;
float sp = (float)(sp0 / (1 << level));
sp = MAX( sp, 1 ); //这里保证了sp≥1,那么窗口最小是3×3
//这段语句主要作用1、通过上采样得到dst_pyramid[level];2、得到掩码mask
if( level < max_level )
{
cv::Size size1 = dst_pyramid[level+1].size();
cv::Mat m( size.height, size.width, CV_8UC1, mask0.data );
dstep = (int)dst_pyramid[level+1].step;
dptr = dst_pyramid[level+1].data + dstep + cn;
mstep = (int)m.step;
mask = m.data + mstep;
//cvResize( dst_pyramid[level+1], dst_pyramid[level], CV_INTER_CUBIC );
cv::pyrUp( dst_pyramid[level+1], dst_pyramid[level], dst_pyramid[level].size() ); //上采样
m.setTo(cv::Scalar::all(0));
for( i = 1; i < size1.height-1; i++, dptr += dstep - (size1.width-2)*3, mask += mstep*2 )
{
for( j = 1; j < size1.width-1; j++, dptr += cn )
{
int c0 = dptr[0], c1 = dptr[1], c2 = dptr[2];
mask[j*2 - 1] = cdiff(-3) || cdiff(3) || cdiff(-dstep-3) || cdiff(-dstep) ||
cdiff(-dstep+3) || cdiff(dstep-3) || cdiff(dstep) || cdiff(dstep+3);
}
}
cv::dilate( m, m, cv::Mat() ); //对m膨胀
mask = m.data;
}
dptr = dst_pyramid[level].data; //dptr指向图像矩阵起始地址
dstep = (int)dst_pyramid[level].step; //dstep表示图像矩阵每一行的占内存的字节数
for( i = 0; i < size.height; i++, sptr += sstep - size.width*3,
dptr += dstep - size.width*3, //每处理完一行,sptr和dptr都指向下一行的起始地址
mask += mstep )
{
for( j = 0; j < size.width; j++, sptr += 3, dptr += 3 ) //每处理完一列,sptr和dptr都指向同行下一列像素的起始地址,所以sptr和dptr实际就是每个像素点的地址
{
int x0 = j, y0 = i, x1, y1, iter;
int c0, c1, c2;
if( mask && !mask[j] )
continue;
c0 = sptr[0], c1 = sptr[1], c2 = sptr[2]; //分别对应像素点三通道的地址
// iterate meanshift procedure
for( iter = 0; iter < termcrit.max_iter; iter++ )
{
uchar* ptr;
int x, y, count = 0;
int minx, miny, maxx, maxy;
int s0 = 0, s1 = 0, s2 = 0, sx = 0, sy = 0; //(x,y)的迭代的坐标值,(s0,s1,s2)是迭代的3通道分量值
double icount;
int stop_flag;
//mean shift: process pixels in window (p-sigmaSp)x(p+sigmaSp)
minx = cvRound(x0 - sp); minx = MAX(minx, 0); //若j-sp>=0,则minx=(j-sp),否则,minx=0;
miny = cvRound(y0 - sp); miny = MAX(miny, 0); //若i-sp>=0,则miny=(i-sp),否则,miny=0;
maxx = cvRound(x0 + sp); maxx = MIN(maxx, size.width-1); //若j+sp<=width+1,则maxx=j+sp,否则,maxx=width-1;
maxy = cvRound(y0 + sp); maxy = MIN(maxy, size.height-1); //若i+sp<=height+1,则maxy=i+sp,否则,maxy=height-1;
ptr = sptr + (miny - i)*sstep + (minx - j)*3; //sptr指向(i,j),ptr则指向当前窗口第一个像素点
for( y = miny; y <= maxy; y++, ptr += sstep - (maxx-minx+1)*3 ) //窗口内,每处理完一行,ptr指向下一行首地址
{
int row_count = 0;
x = minx;
#if CV_ENABLE_UNROLLED
for( ; x + 3 <= maxx; x += 4, ptr += 12 ) //这两次for循环是什么意思?颜色限定和空间限定?
{
int t0 = ptr[0], t1 = ptr[1], t2 = ptr[2];
if( tab[t0-c0+255] + tab[t1-c1+255] + tab[t2-c2+255] <= isr2 )
{
s0 += t0; s1 += t1; s2 += t2;
sx += x; row_count++;
}
t0 = ptr[3], t1 = ptr[4], t2 = ptr[5];
if( tab[t0-c0+255] + tab[t1-c1+255] + tab[t2-c2+255] <= isr2 )
{
s0 += t0; s1 += t1; s2 += t2;
sx += x+1; row_count++;
}
t0 = ptr[6], t1 = ptr[7], t2 = ptr[8];
if( tab[t0-c0+255] + tab[t1-c1+255] + tab[t2-c2+255] <= isr2 )
{
s0 += t0; s1 += t1; s2 += t2;
sx += x+2; row_count++;
}
t0 = ptr[9], t1 = ptr[10], t2 = ptr[11];
if( tab[t0-c0+255] + tab[t1-c1+255] + tab[t2-c2+255] <= isr2 )
{
s0 += t0; s1 += t1; s2 += t2;
sx += x+3; row_count++;
}
}
#endif
for( ; x <= maxx; x++, ptr += 3 )
{
int t0 = ptr[0], t1 = ptr[1], t2 = ptr[2];
if( tab[t0-c0+255] + tab[t1-c1+255] + tab[t2-c2+255] <= isr2 )
{
s0 += t0; s1 += t1; s2 += t2;
sx += x; row_count++;
}
}
count += row_count;
sy += y*row_count;
}
if( count == 0 )
break;
icount = 1./count;
x1 = cvRound(sx*icount);
y1 = cvRound(sy*icount);
s0 = cvRound(s0*icount);
s1 = cvRound(s1*icount);
s2 = cvRound(s2*icount);
stop_flag = (x0 == x1 && y0 == y1) || abs(x1-x0) + abs(y1-y0) +
tab[s0 - c0 + 255] + tab[s1 - c1 + 255] +
tab[s2 - c2 + 255] <= termcrit.epsilon;
x0 = x1; y0 = y1;
c0 = s0; c1 = s1; c2 = s2;
if( stop_flag )
break;
}
dptr[0] = (uchar)c0;
dptr[1] = (uchar)c1;
dptr[2] = (uchar)c2;
}
}
}
}
void cv::pyrMeanShiftFiltering( InputArray _src, OutputArray _dst,
double sp, double sr, int maxLevel,
TermCriteria termcrit )
{
Mat src = _src.getMat();
if( src.empty() )
return;
_dst.create( src.size(), src.type() );
CvMat c_src = src, c_dst = _dst.getMat();
cvPyrMeanShiftFiltering( &c_src, &c_dst, sp, sr, maxLevel, termcrit );
}</span><span style="font-size:18px;">
</span>