https://blog.csdn.net/u012325601/article/details/60882949
陀螺仪随机误差的Allan方差分析
GitHub仓库:https://github.com/XinLiGitHub/GyroAllan
PS:博文不再更新,后续更新会在GitHub仓库进行。
1,前言
陀螺仪的随机误差主要包括:量化噪声、角度随机游走、零偏不稳定性、角速率随机游走、速率斜坡和正弦分量。对于这些随机误差,利用常规的分析方法,例如计算样本 均值和方差,并不能揭示出潜在的误差源。另一方面,在实 际工作中通过对自相关函数和功率谱密度函数加以分析将随 机误差分离出来是很困难的。Allan方差法是20世纪60年代由美国国家标准局的David Allan提出的,它是一种基于时域的分析方法。Allan方差法 的主要特点是能非常容易地对各种误差源及其对整个噪声统 计特性的贡献进行细致的表征和辨识,而且具有便于计算、 易于分离等优点。
2,MATLAB程序
allan.m文件
-
function [T,sigma] = allan(omega,fs,pts) -
[N,M] = size(omega); % figure out how big the output data set is -
n = 2.^(0:floor(log2(N/2)))'; % determine largest bin size -
maxN = n(end); -
endLogInc = log10(maxN); -
m = unique(ceil(logspace(0,endLogInc,pts)))'; % create log spaced vector average factor -
t0 = 1/fs; % t0 = sample interval -
T = m*t0; % T = length of time for each cluster -
theta = cumsum(omega)/fs; % integration of samples over time to obtain output angle θ -
sigma2 = zeros(length(T),M); % array of dimensions (cluster periods) X (#variables) -
for i=1:length(m) % loop over the various cluster sizes -
for k=1:N-2*m(i) % implements the summation in the AV equation -
sigma2(i,:) = sigma2(i,:) + (theta(k+2*m(i),:) - 2*theta(k+m(i),:) + theta(k,:)).^2; -
end -
end -
sigma2 = sigma2./repmat((2*T.^2.*(N-2*m)),1,M); -
sigma = sqrt(sigma2);
nihe.m文件
-
function C=nihe(tau,sig,M) -
X=tau';Y=sig'; -
B=zeros(1,2*M+1); -
F=zeros(length(X),2*M+1); -
for i=1:2*M+1 -
kk=i-M-1; -
F(:,i)=X.^kk; -
end -
A=F'*F; -
B=F'*Y; -
C=A\B;
gyro_data.m文件
-
clc; -
clear; -
data = dlmread('data.dat'); %从文本中读取数据,单位:deg/s,速率:100Hz -
data = data(720000:2520000, 3:5)*3600; %截取保温两个小时后的,五个小时的数据,把 deg/s 转为 deg/h -
[A, B] = allan(data, 100, 100); %求Allan标准差,用100个点来描述 -
loglog(A, B, 'o'); %画双对数坐标图 -
xlabel('time:sec'); %添加x轴标签 -
ylabel('Sigma:deg/h'); %添加y轴标签 -
legend('X axis','Y axis','Z axis'); %添加标注 -
grid on; %添加网格线 -
hold on; %使图像不被覆盖 -
C(1, :) = nihe(A', (B(:,1)').^2, 2)'; %拟合 -
C(2, :) = nihe(A', (B(:,2)').^2, 2)'; -
C(3, :) = nihe(A', (B(:,3)').^2, 2)'; -
Q = sqrt(abs(C(:, 1) / 3)); %量化噪声,单位:deg/h -
N = sqrt(abs(C(:, 2) / 1)) / 60; %角度随机游走,单位:deg/h^0.5 -
Bs = sqrt(abs(C(:, 3))) / 0.6643; %零偏不稳定性,单位:deg/h -
K = sqrt(abs(C(:, 4) * 3)) * 60; %角速率游走,单位:deg/h/h^0.5 -
R = sqrt(abs(C(:, 5) * 2)) * 3600; %速率斜坡,单位:deg/h/h -
fprintf('量化噪声 X轴:%f Y轴:%f Z轴:%f 单位:deg/h\n', Q(1), Q(2), Q(3)); -
fprintf('角度随机游走 X轴:%f Y轴:%f Z轴:%f 单位:deg/h^0.5\n', N(1), N(2), N(3)); -
fprintf('零偏不稳定性 X轴:%f Y轴:%f Z轴:%f 单位:deg/h\n', Bs(1), Bs(2), Bs(3)); -
fprintf('角速率游走 X轴:%f Y轴:%f Z轴:%f 单位:deg/h/h^0.5\n', K(1), K(2), K(3)); -
fprintf('速率斜坡 X轴:%f Y轴:%f Z轴:%f 单位:deg/h/h\n', R(1), R(2), R(3)); -
D(:, 1) = sqrt(C(1,1)*A.^(-2) + C(1,2)*A.^(-1) + C(1,3)*A.^(0) + C(1,4)*A.^(1) + C(1,5)*A.^(2)); %生成拟合函数 -
D(:, 2) = sqrt(C(2,1)*A.^(-2) + C(2,2)*A.^(-1) + C(2,3)*A.^(0) + C(2,4)*A.^(1) + C(2,5)*A.^(2)); -
D(:, 3) = sqrt(C(3,1)*A.^(-2) + C(3,2)*A.^(-1) + C(3,3)*A.^(0) + C(3,4)*A.^(1) + C(3,5)*A.^(2)); -
loglog(A, D); %画双对数坐标图
3,运行结果
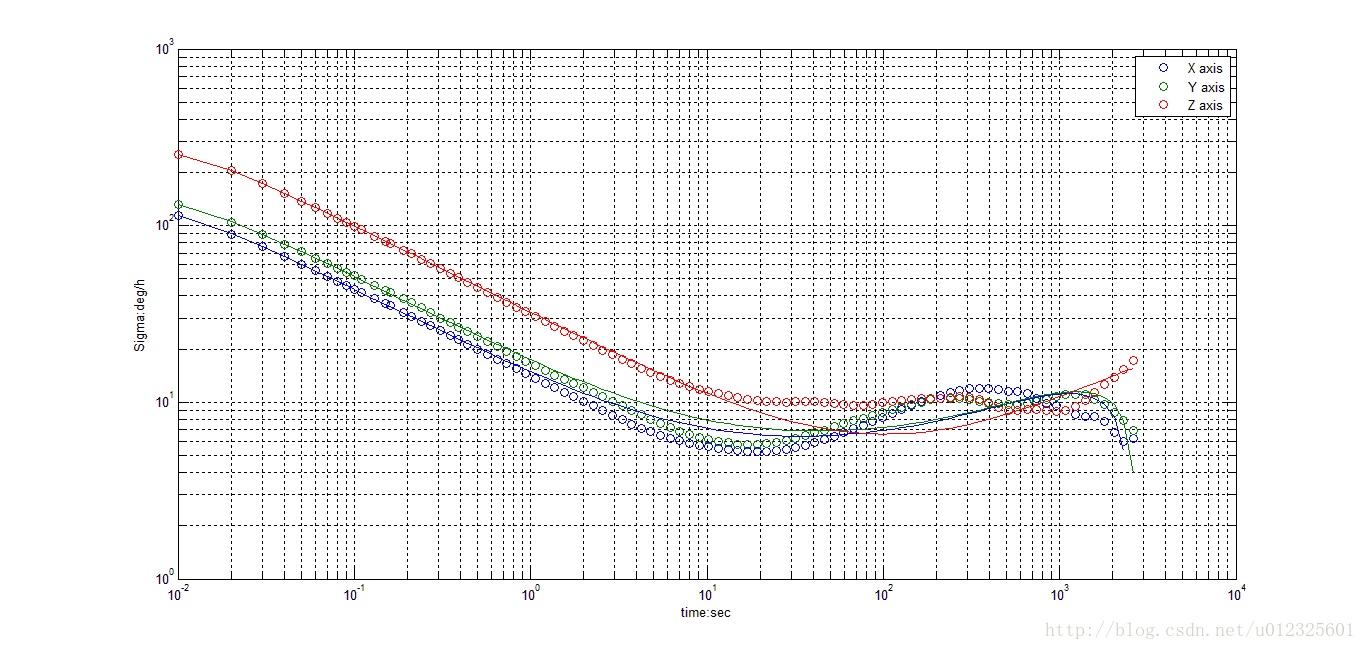
量化噪声 X轴:0.458971 Y轴:0.564662 Z轴:1.118367 单位:deg/h
角度随机游走 X轴:0.231291 Y轴:0.273737 Z轴:0.532305 单位:deg/h^0.5
零偏不稳定性 X轴:8.264598 Y轴:8.849770 Z轴:7.367757 单位:deg/h
角速率游走 X轴:42.156012 Y轴:40.870664 Z轴:32.268721 单位:deg/h/h^0.5
速率斜坡 X轴:43.040958 Y轴:40.022454 Z轴:11.171091 单位:deg/h/h
注意:当Allan标准差的拟合多项式中的拟合系数是负值时,所得误差项的拟合结果随着相关时间的微小改变变化很大,拟合误差很大,可信度差。